Реализуйте трейлер в 3D среде
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Sim3D / Транспортное средство Sim3D / Компоненты
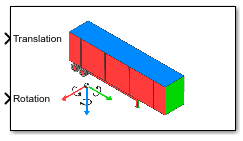
Блок Simulation 3D Trailer реализует трейлер с двумя или тремя осями в 3D среде симуляции.
Чтобы использовать блок Simulation 3D Trailer, гарантируйте, что блок Simulation 3D Scene Configuration находится в вашей модели. Если вы устанавливаете параметр Sample time блока Simulation 3D Trailer к -1, блок использует шаг расчета, заданный в блоке Simulation 3D Scene Configuration.
Блок ввел, использует транспортное средство Z-down предназначенная для правой руки (RH) Декартова система координат, заданная в SAE J6701. Система координат является инерционной и первоначально выровненная с транспортным средством геометрический центр:
Ось X — Точки передают вдоль транспортного средства продольную ось
Ось Y — Точки направо вдоль оси ответвления транспортного средства
Ось Z — Точки вниз
Совет
Проверьте, что блок Simulation 3D Trailer выполняется перед блоком Simulation 3D Scene Configuration. Тем путем Simulation 3D Vehicle готовит данные сигнала перед Нереальным Engine® 3D среда визуализации получает его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Trailer — -1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Управления и Отображения.
Translation — Перевод транспортного средства3 массив (значение по умолчанию) | 7- 3 массивТранспортное средство и перевод колеса, в m. Измерениями массива является 5- 3 для трейлера 2D оси и 7- 3 для трейлера с тремя осями, где:
Translation(1,1), Translation(1,2), и Translation(1,3) — Перевод транспортного средства вдоль инерционного транспортного средства Z-down X-, Y-и оси Z, соответственно.
Translation(...,1), Translation(...,2), и Translation(...,3) — Перевод колеса относительно транспортного средства, вдоль транспортного средства Z-down X-, Y-и оси Z, соответственно.
Сигнал содержит информацию о переводе согласно местоположениям колеса и оси.
Для трейлера 2D оси:
| Перевод | Элемент массива | Ось перевода |
|---|---|---|
Транспортное средство, Xv | Translation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Yv | Translation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Zv | Translation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, XFL | Translation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, YFL | Translation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, ZFL | Translation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, XFR | Translation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, YFR | Translation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, ZFR | Translation(3,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, XRL | Translation(4,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, YRL | Translation(4,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, ZRL | Translation(4,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, XRR | Translation(5,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, YRR | Translation(5,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, ZRR | Translation(5,3) | Транспортное средство ось Z Z-down |
Для трейлера с тремя осями:
| Перевод | Элемент массива | Ось перевода |
|---|---|---|
Транспортное средство, Xv | Translation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Yv | Translation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Zv | Translation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, XFL | Translation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, YFL | Translation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, ZFL | Translation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, XFR | Translation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, YFR | Translation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, ZFR | Translation(3,3) | Транспортное средство ось Z Z-down |
Середина оставила колесо, XML (для трейлера с тремя осями) | Translation(4,1) | Транспортное средство ось X Z-down |
Середина оставила колесо, YML | Translation(4,2) | Транспортное средство ось Y Z-down |
Середина оставила колесо, ZML | Translation(4,3) | Транспортное средство ось Z Z-down |
Среднее правильное колесо, XMR | Translation(5,1) | Транспортное средство ось X Z-down |
Среднее правильное колесо, YMR | Translation(5,2) | Транспортное средство ось Y Z-down |
Среднее правильное колесо, ZMR | Translation(5,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, XRL | Translation(6,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, YRL | Translation(6,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, ZRL | Translation(6,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, XRR | Translation(7,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, YRR | Translation(7,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, ZRR | Translation(7,3) | Транспортное средство ось Z Z-down |
Rotation — Вращение транспортного средства3 массив (значение по умолчанию) | 7- 3 массивТранспортное средство и вращение колеса, в рад. Измерениями массива является 5- 3 для трейлера 2D оси и 7- 3 для трейлера с тремя осями, где:
Rotation(1,1), Rotation(1,2), и Rotation(1,3) — Вращение транспортного средства вокруг инерционного транспортного средства Z-down X-, Y-и оси Z, соответственно.
Rotation(...,1), Rotation(...,2), и Rotation(...,3) — Вращение колеса относительно транспортного средства, о транспортном средстве Z-down X-, Y-и оси Z, соответственно.
Сигнал содержит информацию о вращении согласно местоположениям колеса и оси.
Для трейлера 2D оси:
| Вращение | Элемент массива | Ось вращения |
|---|---|---|
Транспортное средство, Rollv | Rotation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Pitchv | Rotation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Yawv | Rotation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, RollFL | Rotation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, PitchFL | Rotation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, YawFL | Rotation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, RollFR | Rotation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, PitchFR | Rotation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, YawFR | Rotation(3,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, RollRL | Rotation(4,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, PitchRL | Rotation(4,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, YawRL | Rotation(4,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, RollRR | Rotation(5,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, PitchRR | Rotation(5,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, YawRR | Rotation(5,3) | Транспортное средство ось Z Z-down |
Для трейлера с тремя осями:
| Вращение | Элемент массива | Ось вращения |
|---|---|---|
Транспортное средство, Rollv | Rotation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Pitchv | Rotation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Yawv | Rotation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, RollFL | Rotation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, PitchFL | Rotation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, YawFL | Rotation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, RollFR | Rotation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, PitchFR | Rotation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, YawFR | Rotation(3,3) | Транспортное средство ось Z Z-down |
Середина оставила колесо, RollML | Rotation(4,1) | Транспортное средство ось X Z-down |
Середина оставила колесо, PitchML | Rotation(4,2) | Транспортное средство ось Y Z-down |
Середина оставила колесо, YawML | Rotation(4,3) | Транспортное средство ось Z Z-down |
Среднее правильное колесо, RollMR | Rotation(5,1) | Транспортное средство ось X Z-down |
Среднее правильное колесо, PitchMR | Rotation(5,2) | Транспортное средство ось Y Z-down |
Среднее правильное колесо, YawMR | Rotation(5,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, RollRL | Rotation(6,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, PitchRL | Rotation(6,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, YawRL | Rotation(6,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, RollRR | Rotation(7,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, PitchRR | Rotation(7,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, YawRR | Rotation(7,3) | Транспортное средство ось Z Z-down |
Type — Тип трейлераTwo-axle trailer (значение по умолчанию) | Three-axle trailerName — Имя транспортного средстваSimulinkVehicle1 (значение по умолчанию) | вектор символовИмя транспортного средства. По умолчанию, когда вы используете блок в своей модели, блок устанавливает параметр Name на SimulinkVehicle. Значение XX
Initial array values to translate vehicle per part, Translation — Перевод начальной буквы транспортного средстваНачальное транспортное средство и перевод колеса, в m. Измерениями массива является 5- 3 для трейлера 2D оси и 7- 3 для трейлера с тремя осями, где:
Translation(1,1), Translation(1,2), и Translation(1,3) — Начальный перевод транспортного средства вдоль инерционного транспортного средства система координат Z-down X-, Y-и оси Z, соответственно.
Translation(...,1), Translation(...,2), и Translation(...,3) — Начальный перевод колеса относительно транспортного средства, вдоль транспортного средства Z-down X-, Y-и оси Z, соответственно.
Сигнал содержит информацию о переводе согласно местоположениям колеса и оси.
Для трейлера 2D оси:
| Перевод | Элемент массива | Ось перевода |
|---|---|---|
Транспортное средство, Xv | Translation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Yv | Translation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Zv | Translation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, XFL | Translation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, YFL | Translation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, ZFL | Translation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, XFR | Translation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, YFR | Translation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, ZFR | Translation(3,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, XRL | Translation(4,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, YRL | Translation(4,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, ZRL | Translation(4,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, XRR | Translation(5,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, YRR | Translation(5,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, ZRR | Translation(5,3) | Транспортное средство ось Z Z-down |
Для трейлера с тремя осями:
| Перевод | Элемент массива | Ось перевода |
|---|---|---|
Транспортное средство, Xv | Translation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Yv | Translation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Zv | Translation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, XFL | Translation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, YFL | Translation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, ZFL | Translation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, XFR | Translation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, YFR | Translation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, ZFR | Translation(3,3) | Транспортное средство ось Z Z-down |
Середина оставила колесо, XML (для трейлера с тремя осями) | Translation(4,1) | Транспортное средство ось X Z-down |
Середина оставила колесо, YML | Translation(4,2) | Транспортное средство ось Y Z-down |
Середина оставила колесо, ZML | Translation(4,3) | Транспортное средство ось Z Z-down |
Среднее правильное колесо, XMR | Translation(5,1) | Транспортное средство ось X Z-down |
Среднее правильное колесо, YMR | Translation(5,2) | Транспортное средство ось Y Z-down |
Среднее правильное колесо, ZMR | Translation(5,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, XRL | Translation(6,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, YRL | Translation(6,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, ZRL | Translation(6,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, XRR | Translation(7,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, YRR | Translation(7,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, ZRR | Translation(7,3) | Транспортное средство ось Z Z-down |
Initial array values to rotate vehicle per part, Rotation — Вращение начальной буквы транспортного средстваНачальное транспортное средство и вращение колеса, о транспортном средстве Z-down X-, Y-и оси Z, в рад.
Измерениями массива является 5- 3 для трейлера 2D оси и 7- 3 для трейлера с тремя осями, где:
Rotation(1,1), Rotation(1,2), и Rotation(1,3) — Начальное вращение транспортного средства вокруг инерционного транспортного средства система координат Z-down X-, Y-и оси Z, соответственно.
Rotation(...,1), Rotation(...,2), и Rotation(...,3) — Начальное вращение колеса относительно транспортного средства, о транспортном средстве Z-down X-, Y-и оси Z, соответственно.
Сигнал содержит информацию о переводе согласно местоположениям колеса и оси.
Для трейлера 2D оси:
| Вращение | Элемент массива | Ось вращения |
|---|---|---|
Транспортное средство, Rollv | Rotation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Pitchv | Rotation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Yawv | Rotation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, RollFL | Rotation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, PitchFL | Rotation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, YawFL | Rotation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, RollFR | Rotation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, PitchFR | Rotation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, YawFR | Rotation(3,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, RollRL | Rotation(4,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, PitchRL | Rotation(4,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, YawRL | Rotation(4,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, RollRR | Rotation(5,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, PitchRR | Rotation(5,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, YawRR | Rotation(5,3) | Транспортное средство ось Z Z-down |
Для трейлера с тремя осями:
| Вращение | Элемент массива | Ось вращения |
|---|---|---|
Транспортное средство, Rollv | Rotation(1,1) | Инерционное транспортное средство Ось X Z-down |
Транспортное средство, Pitchv | Rotation(1,2) | Инерционное транспортное средство Ось Y Z-down |
Транспортное средство, Yawv | Rotation(1,3) | Инерционное транспортное средство ось Z Z-down |
Передняя сторона оставила колесо, RollFL | Rotation(2,1) | Транспортное средство ось X Z-down |
Передняя сторона оставила колесо, PitchFL | Rotation(2,2) | Транспортное средство ось Y Z-down |
Передняя сторона оставила колесо, YawFL | Rotation(2,3) | Транспортное средство ось Z Z-down |
Переднее правильное колесо, RollFR | Rotation(3,1) | Транспортное средство ось X Z-down |
Переднее правильное колесо, PitchFR | Rotation(3,2) | Транспортное средство ось Y Z-down |
Переднее правильное колесо, YawFR | Rotation(3,3) | Транспортное средство ось Z Z-down |
Середина оставила колесо, RollML | Rotation(4,1) | Транспортное средство ось X Z-down |
Середина оставила колесо, PitchML | Rotation(4,2) | Транспортное средство ось Y Z-down |
Середина оставила колесо, YawML | Rotation(4,3) | Транспортное средство ось Z Z-down |
Среднее правильное колесо, RollMR | Rotation(5,1) | Транспортное средство ось X Z-down |
Среднее правильное колесо, PitchMR | Rotation(5,2) | Транспортное средство ось Y Z-down |
Среднее правильное колесо, YawMR | Rotation(5,3) | Транспортное средство ось Z Z-down |
Задняя часть оставила колесо, RollRL | Rotation(6,1) | Транспортное средство ось X Z-down |
Задняя часть оставила колесо, PitchRL | Rotation(6,2) | Транспортное средство ось Y Z-down |
Задняя часть оставила колесо, YawRL | Rotation(6,3) | Транспортное средство ось Z Z-down |
Заднее правильное колесо, RollRR | Rotation(7,1) | Транспортное средство ось X Z-down |
Заднее правильное колесо, PitchRR | Rotation(7,2) | Транспортное средство ось Y Z-down |
Заднее правильное колесо, YawRR | Rotation(7,3) | Транспортное средство ось Z Z-down |
Sample time Размер шагаscalarШаг расчета, Ts. Графическая частота кадров является инверсией шага расчета.
[1] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 2008.
[2] Технический Комитет. Дорожные транспортные средства — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Vehicle Body 3DOF Three Axles | Simulation 3D Tractor | Trailer Body 3DOF | Trailer Body 6DOF
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

