Оцените параметры нелинейной модели ARX
sys = nlarx(data,orders)
sys = nlarx(data,regressors)regressors. Используйте этот синтаксис, когда у вас есть линейные регрессоры, которые имеют непоследовательные задержки, или когда у вас также есть полиномиальные регрессоры, пользовательские регрессоры или оба.
sys = nlarx(___,output_fcn)
sys = nlarx(data,linmodel)linmodel задавать порядки модели и начальные значения линейных коэффициентов модели. Используйте этот синтаксис, когда это необходимо, чтобы создать нелинейную модель ARX как расширение, или улучшение на, существующую линейную модель. Когда вы используете этот синтаксис, программное обеспечение инициализирует значение смещения к 0. В некоторых случаях можно улучшить результаты оценки путем переопределения этой инициализации с командой sys.OutputFcn.Offset.Value = NaN.
sys = nlarx(data,linmodel,output_fcn)
sys = nlarx(data,sys0)sys0.
Используйте этот синтаксис для:
Оцените, что параметры модели ранее создали использование idnlarx конструктор. До оценки можно сконфигурировать свойства модели с помощью записи через точку.
Обновите параметры ранее предполагаемой модели, чтобы улучшить подгонку к данным об оценке. В этом случае алгоритм оценки использует параметры sys0 как исходные предположения.
Загрузите данные об оценке.
load twotankdata;Создайте iddata объект из данных об оценке с шагом расчета 0,2 секунд.
Ts = 0.2; z = iddata(y,u,Ts);
Оцените нелинейную модель ARX с помощью порядков модели ARX задать регрессоры.
sysNL = nlarx(z,[4 4 1])
sysNL = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
sys использует idWaveletNetwork по умолчанию функционируйте как выходную функцию.
Для сравнения вычислите линейную модель ARX с теми же порядками модели.
sysL = arx(z,[4 4 1]);
Сравните выходные параметры модели с исходными данными.
compare(z,sysNL,sysL)

Нелинейная модель имеет намного лучшую подгонку к данным, чем линейная модель.
Задайте линейный регрессор, который эквивалентен матрице порядка модели ARX [4 4 1].
Матрица порядка [4 4 1] указывает, что оба набора регрессора ввода и вывода содержат четыре регрессора с задержками в пределах от 1 - 4. Например, представляет второй входной регрессор.
Задайте выход и введите имена.
output_name = 'y1'; input_name = 'u1'; names = {output_name,input_name};
Задайте выход и введите задержки.
output_lag = [1 2 3 4];
input_lag = [1 2 3 4];
lags = {output_lag,input_lag};Создайте линейный объект регрессора.
lreg = linearRegressor(names,lags)
lreg =
Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1 2 3 4] [1 2 3 4]}
UseAbsolute: [0 0]
TimeVariable: 't'
Regressors described by this set
Загрузите данные об оценке и создайте объект iddata.
load twotankdata
z = iddata(y,u,0.2);Оцените нелинейную модель ARX.
sys = nlarx(z,lreg)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
Просмотрите регрессоры
getreg(sys)
ans = 8x1 cell
{'y1(t-1)'}
{'y1(t-2)'}
{'y1(t-3)'}
{'y1(t-4)'}
{'u1(t-1)'}
{'u1(t-2)'}
{'u1(t-3)'}
{'u1(t-4)'}
Сравните выход модели с данными об оценке.
compare(z,sys)

Создайте время и массивы данных.
dt = 0.01; t = 0:dt:10; y = 10*sin(2*pi*t)+rand(size(t));
Создайте iddata объект без входного сигнала задан.
z = iddata(y',[],dt);
Оцените нелинейную модель ARX.
sys = nlarx(z,2)
sys = Nonlinear time series model Outputs: y1 Regressors: Linear regressors in variables y1 List of all regressors Output function: Wavelet network with 8 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 92.92% (prediction focus) FPE: 0.2568, MSE: 0.2507
Оцените нелинейную модель ARX, которая использует функцию отображения idSigmoidNetwork как его выходная функция.
Загрузите данные и разделите их на наборы данных оценки и валидации ze и zv.
load twotankdata.mat u y z = iddata(y,u,'Ts',0.2); ze = z(1:1500); zv = z(1501:end);
Сконфигурируйте idSigmoidNetwork отображение функции. Зафиксируйте смещение к 0,2 и количество модулей к 15.
s = idSigmoidNetwork; s.Offset.Value = 0.2; s. NonlinearFcn.NumberOfUnits = 15;
Создайте линейную спецификацию регрессора модели, которая содержит четыре выходных регрессора и пять входных регрессоров.
reg1 = linearRegressor({'y1','u1'},{1:4,0:4});Создайте спецификацию регрессора полиномиальной модели, которая содержит квадраты двух входных терминов и трех выходных терминов.
reg2 = polynomialRegressor({'y1','u1'},{1:2,0:2},2);Установите опции оценки для метода поиска и максимального количества итераций.
opt = nlarxOptions('SearchMethod','fmincon')'; opt.SearchOptions.MaxIterations = 40;
Оцените нелинейную модель ARX.
sys = nlarx(ze,[reg1;reg2],s,opt);
Подтвердите sys путем сравнения симулированного ответа модели на набор данных валидации.
compare(zv,sys)

Оцените линейную модель и улучшите модель путем добавления treepartition выходная функция.
Загрузите данные об оценке.
load throttledata ThrottleData
Оцените линейную модель ARX linsys с порядками [2 2 1].
linsys = arx(ThrottleData,[2 2 1]);
Создайте idnlarx обработайте по шаблону модель, которая использует linsys и задает sigmoidnet как выходная функция.
sys0 = idnlarx(linsys,idTreePartition);
Зафиксируйте линейный компонент sys0 так, чтобы во время оценки, линейного фрагмента sys0 остается идентичным linsys. Установите значение компонента смещения к NaN.
sys0.OutputFcn.LinearFcn.Free = false; sys0.OutputFcn.Offset.Value = NaN;
Оцените свободные параметры sys0, которые являются нелинейными параметрами функции и смещением.
sys = nlarx(ThrottleData,sys0);
Сравните подходящую точность для линейных и нелинейных моделей.
compare(ThrottleData,linsys,sys)

Генерация пользовательского объекта отображения сети требует определения пользовательской модульной функции.
Задайте модуль, функционируют и сохраняют его как gaussunit.m.
function [f,g,a] = gaussunit(x) % Custom unit function nonlinearity. % % Copyright 2015 The MathWorks, Inc. f = exp(-x.*x); if nargout>1 g = -2*x.*f; a = 0.2; end
Создайте пользовательский объект отображения сети использование указателя на gaussunit функция.
H = @gaussunit; CNet = idCustomNetwork(H);
Загрузите данные об оценке.
load iddata1
Оцените нелинейную модель ARX с помощью пользовательской сети.
sys = nlarx(z1,[1 2 1],CNet)
sys = <strong>Nonlinear ARX model with 1 output and 1 input</strong> Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 Output function: Custom Network with 10 units and "gaussunit" unit function Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 64.35% (prediction focus) FPE: 3.58, MSE: 2.465
Загрузите данные об оценке.
load motorizedcamera;Создайте iddata объект.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z iddata объект с шестью входными параметрами и двумя выходными параметрами.
Задайте порядки модели.
Orders = [ones(2,2),2*ones(2,6),ones(2,6)];
Задайте различные функции отображения для каждого выходного канала.
NL = [idWaveletNetwork(2),idLinear];
Оцените нелинейную модель ARX.
sys = nlarx(z,Orders,NL)
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Wavelet network with 2 units Output 2: None Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "Motorized Camera". Fit to estimation data: [98.72;98.77]% (prediction focus) FPE: 0.5719, MSE: 1.061
Загрузите данные об оценке и создайте iddata объект zZ содержит два выходных канала и шесть входных каналов.
load motorizedcamera;
z = iddata(y,u,0.02);Задайте набор линейных регрессоров, который использует выход и входные имена от z и содержит:
2 выходных регрессора с 1 задержкой.
6 входных пар регрессора с 1 и 2 задержками.
names = [z.OutputName; z.InputName];
lags = {1,1,[1,2],[1,2],[1,2],[1,2],[1,2],[1,2]};
reg = linearRegressor(names,lags);Оцените нелинейную модель ARX с помощью idSigmoidNetwork отображение функции с четырьмя модулями для всех выходных каналов.
sys = nlarx(z,reg,idSigmoidNetwork(4))
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Sigmoid network with 4 units Output 2: Sigmoid network with 4 units Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: [98.86;98.79]% (prediction focus) FPE: 2.641, MSE: 0.9233
Загрузите данные об оценке z1, который имеет вход того и один выход, и получите выход и введите имена.
load iddata1 z1; names = [z1.OutputName z1.InputName]
names = 1x2 cell
{'y1'} {'u1'}
Задайте L как набор линейных регрессоров, который представляет , , и .
L = linearRegressor(names,{1,[2 5]});Задайте P как полиномиальный регрессор .
P = polynomialRegressor(names(1),1,2);
Задайте C как пользовательский регрессор . Используйте указатель анонимной функции, чтобы задать эту функцию.
C = customRegressor(names,{2 3},@(x,y)x.*y)C =
Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Объедините регрессоры в вектор-столбце R.
R = [L;P;C]
R =
[3 1] array of linearRegressor, polynomialRegressor, customRegressor objects.
------------------------------------
1. Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1] [2 5]}
UseAbsolute: [0 0]
TimeVariable: 't'
------------------------------------
2. Order 2 regressors in variables y1
Order: 2
Variables: {'y1'}
Lags: {[1]}
UseAbsolute: 0
AllowVariableMix: 0
AllowLagMix: 0
TimeVariable: 't'
------------------------------------
3. Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Оцените нелинейную модель ARX с R.
sys = nlarx(z1,R)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: 1. Linear regressors in variables y1, u1 2. Order 2 regressors in variables y1 3. Custom regressor: y1(t-2).*u1(t-3) List of all regressors Output function: Wavelet network with 1 units Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 59.73% (prediction focus) FPE: 3.356, MSE: 3.147
Просмотрите полный набор регрессора.
getreg(sys)
ans = 5x1 cell
{'y1(t-1)' }
{'u1(t-2)' }
{'u1(t-5)' }
{'y1(t-1)^2' }
{'y1(t-2).*u1(t-3)'}
Загрузите данные об оценке.
load iddata1;Создайте сигмоидальный объект отображения сети с 10 модулями и никаким линейным членом.
SN = idSigmoidNetwork(10,false);
Оцените нелинейную модель ARX. Подтвердите, что модель не использует линейную функцию.
sys = nlarx(z1,[2 2 1],SN); sys.OutputFcn.LinearFcn.Use
ans = logical
0
Загрузите данные об оценке.
load throttledata;Детрендируйте данные.
Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData,Tr);
Оцените линейную модель ARX.
LinearModel = arx(DetrendedData,[2 1 1]);
Оцените нелинейную модель ARX с помощью линейной модели. Порядки модели, задержки и линейные параметры NonlinearModel выведены из LinearModel.
NonlinearModel = nlarx(ThrottleData,LinearModel)
NonlinearModel = Nonlinear ARX model with 1 output and 1 input Inputs: Step Command Outputs: Throttle Valve Position Regressors: Linear regressors in variables Throttle Valve Position, Step Command List of all regressors Output function: Wavelet network with 12 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "ThrottleData". Fit to estimation data: 65.67% (prediction focus) FPE: 145.7, MSE: 130
idnlarx ОбъектЗагрузите данные об оценке.
load iddata1;Создайте idnlarx модель.
sys = idnlarx([2 2 1]);
Сконфигурируйте модель с помощью записи через точку для:
Используйте сигмоидальный объект отображения сети.
Присвойте имя.
sys.Nonlinearity = 'idSigmoidNetwork'; sys.Name = 'Model 1';
Оцените нелинейную модель ARX со структурой и свойствами, заданными в idnlarx объект.
sys = nlarx(z1,sys)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid network with 10 units Name: Model 1 Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 69.03% (prediction focus) FPE: 2.918, MSE: 1.86
Если оценка останавливается в локальном минимуме, можно встревожить модель с помощью init и повторно оцените модель.
Загрузите данные об оценке.
load iddata1;Оцените первоначальную нелинейную модель.
sys1 = nlarx(z1,[4 2 1],'idSigmoidNetwork');Случайным образом встревожьте параметры модели, чтобы избежать локальных минимумов.
sys2 = init(sys1);
Оцените новую нелинейную модель со встревоженными значениями.
sys2 = nlarx(z1,sys1);
Загрузите данные об оценке.
load twotankdata;Создайте iddata объект из данных об оценке.
z = iddata(y,u,0.2);
Создайте nlarxOptions набор опции, задающий ошибочную цель минимизации симуляции и максимум 10 итераций оценки.
opt = nlarxOptions;
opt.Focus = 'simulation';
opt.SearchOptions.MaxIterations = 10;Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1],idSigmoidNetwork(3),opt)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid network with 3 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 85.86% (simulation focus) FPE: 3.791e-05, MSE: 0.0006853
Загрузите данные о регуляризации в качестве примера.
load regularizationExampleData.mat nldata;
Создайте idSigmoidnetwork отображение объекта с 30 модулями и задает порядки модели.
MO = idSigmoidNetwork(30); Orders = [1 2 1];
Создайте набор опции оценки и установите метод поиска оценки для lm.
opt = nlarxOptions('SearchMethod','lm');
Оцените неупорядоченную модель.
sys = nlarx(nldata,Orders,MO,opt);
Сконфигурируйте регуляризацию Lambda параметр.
opt.Regularization.Lambda = 1e-8;
Оцените упорядоченную модель.
sysR = nlarx(nldata,Orders,MO,opt);
Сравните эти две модели.
compare(nldata,sys,sysR)

Большой отрицательный результат подгонки для неупорядоченной модели указывает на плохую подгонку к данным. Оценка упорядоченной модели приводит к значительно лучшему результату.
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Выходная функция включает линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели и фиксированное смещение для того выхода. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии симуляции.
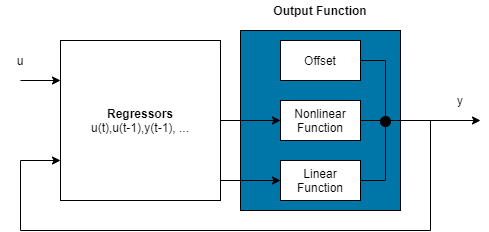
Программное обеспечение вычисляет нелинейную модель ARX выход y на двух этапах:
Это вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными вводами и выводами, такими как u (t –1) и y (t –3). Подобные регрессоры называются linear regressors. Вы задаете линейные регрессоры с помощью linearRegressor объект. Можно также задать линейные регрессоры при помощи линейных порядков модели ARX как входной параметр. Для получения дополнительной информации смотрите Нелинейные Порядки Модели ARX и Задержку. Однако этот второй подход ограничивает ваш набор регрессора к линейным регрессорам с последовательными задержками. Чтобы создать polynomial regressors, используйте polynomialRegressor объект. Можно также задать custom regressors, которые являются нелинейными функциями задержанных вводов и выводов. Например, u (t –1) y (t –3) является пользовательским регрессором, который умножает экземпляры ввода и вывода вместе. Задайте пользовательские регрессоры с помощью customRegressor объект.
Можно присвоить любой из регрессоров как входные параметры с блоком линейной функции выходной функции, нелинейного функционального блока или обоих.
Это сопоставляет регрессоры с выходом модели с помощью блока выходной функции. Блок выходной функции может включать линейные и нелинейные блоки параллельно. Например, рассмотрите следующее уравнение:
Здесь, x является вектором из регрессоров, и r является средним значением x. выход блока линейной функции. представляет выход нелинейного функционального блока. Q является матрицей проекции, которая делает вычисления хорошо подготовленными. d является скалярным смещением, которое добавляется к объединенным выходным параметрам линейных и нелинейных блоков. Точная форма F (x) зависит от вашего выбора выходной функции. Можно выбрать из доступных объектов отображения, таких как сети древовидного раздела, сети вейвлета и многоуровневые нейронные сети. Можно также исключить или линейное или нелинейный функциональный блок от выходной функции.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметра модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры выходной функции. Для получения дополнительной информации об этих объектах, смотрите Нелинейные Структуры модели.
idnlarx | nlarxOptions | isnlarx | goodnessOfFit | aic | fpe | polynomialRegressor | linearRegressor
