Нелинейная модель ARX
idnlarx модель представляет нелинейную модель ARX, которая является расширением линейной структуры ARX и содержит линейные и нелинейные функции.
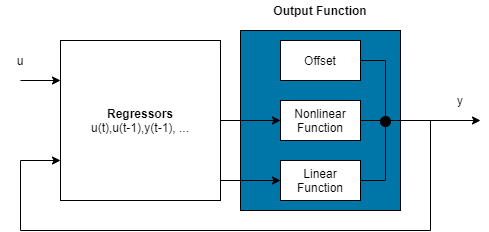
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Выходная функция включает линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели и фиксированное смещение для того выхода. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии симуляции.
Программное обеспечение вычисляет нелинейную модель ARX выход y на двух этапах:
Это вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными вводами и выводами, такими как u (t –1) и y (t –3). Подобные регрессоры называются linear regressors. Вы задаете линейные регрессоры с помощью linearRegressor объект. Можно также задать линейные регрессоры при помощи линейных порядков модели ARX как входной параметр. Для получения дополнительной информации смотрите Нелинейные Порядки Модели ARX и Задержку. Однако этот второй подход ограничивает ваш набор регрессора к линейным регрессорам с последовательными задержками. Чтобы создать polynomial regressors, используйте polynomialRegressor объект. Можно также задать custom regressors, которые являются нелинейными функциями задержанных вводов и выводов. Например, u (t –1) y (t –3) является пользовательским регрессором, который умножает экземпляры ввода и вывода вместе. Задайте пользовательские регрессоры с помощью customRegressor объект.
Можно присвоить любой из регрессоров как входные параметры с блоком линейной функции выходной функции, нелинейного функционального блока или обоих.
Это сопоставляет регрессоры с выходом модели с помощью блока выходной функции. Блок выходной функции может включать линейные и нелинейные блоки параллельно. Например, рассмотрите следующее уравнение:
Здесь, x является вектором из регрессоров, и r является средним значением x. выход блока линейной функции. представляет выход нелинейного функционального блока. Q является матрицей проекции, которая делает вычисления хорошо подготовленными. d является скалярным смещением, которое добавляется к объединенным выходным параметрам линейных и нелинейных блоков. Точная форма F (x) зависит от вашего выбора выходной функции. Можно выбрать из доступных объектов отображения, таких как сети древовидного раздела, сети вейвлета и многоуровневые нейронные сети. Можно также исключить или линейное или нелинейный функциональный блок от выходной функции.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметра модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры выходной функции. Для получения дополнительной информации об этих объектах, смотрите Нелинейные Структуры модели.
Для получения дополнительной информации о idnlarx структура модели, смотрите то, Что Нелинейные Модели ARX?.
Для idnlarx свойства объектов, смотрите Свойства.
Можно получить idnlarx объект одним из двух способов.
sys = idnlarx(output_name,input_name,orders)
sys = idnlarx(output_name,input_name,Regressors)output_name и input_name, соответственно, и регрессор установлен в Regressors это содержит любую комбинацию линейных, полиномиальных, и пользовательских регрессоров. Программное обеспечение создает sys использование сети вейвлета по умолчанию ('idWaveletNetwork') отображение объекта для выходной функции.
sys = idnlarx(linmodel)linmodel извлечь определенные свойства, такие как имена, модули и шаг расчета, и инициализировать значения линейных коэффициентов модели. Используйте этот синтаксис, когда это необходимо, чтобы создать нелинейную модель ARX как расширение, или улучшение на, существующую линейную модель.
sys = idnlarx(___,Name,Value)idnlarx структура модели с помощью одних или нескольких аргументов name-value.
Для получения информации об объектных функциях для idnlarx, см. Нелинейные Модели ARX.
linearRegressor | polynomialRegressor | customRegressor | idnlarx/findop | getreg | linearize | nlarx | pem | idSigmoidNetwork | idWaveletNetwork | idLinear | idCustomNetwork | idFeedforwardNetwork
