Разработайте ведущие сценарии, сконфигурируйте датчики и сгенерируйте синтетические обнаружения объектов
Приложение Driving Scenario Designer позволяет вам разработать синтетический продукт ведущие сценарии для тестирования ваших автономных ведущих систем.
Используя приложение, вы можете:
Крит-Роуд и модели агента с помощью интерфейса перетаскивания.
Сконфигурируйте видение и радарные датчики, смонтированные на автомобиле, оборудованном датчиком, и используйте эти датчики, чтобы моделировать обнаружения агентов и контуров маршрута в сценарии.
Загрузите ведущие сценарии, представляющие европейскую Новую Автомобильную Программу Оценки (Euro NCAP®) тестовые протоколы [1][2][3] и другие предварительно созданные сценарии.
Импортируйте дороги OpenDRIVE® и маршруты в ведущий сценарий. Поддержки приложений версия 1.4H [4] спецификации формата OpenDRIVE.
Экспортируйте обнаружения датчика в MATLAB® или сгенерируйте код MATLAB сценария, который произвел обнаружения.
Импортируйте ведущий сценарий в модель Simulink® при помощи блока Scenario Reader. Можно использовать импортированный сценарий, чтобы протестировать сплав датчика или алгоритмы управления автомобиля.
Чтобы узнать больше об использовании приложения, смотрите Driving Scenario Designer.
Панель инструментов MATLAB: На вкладке Apps, под Automotive, кликают по значку приложения.
Подсказка команды MATLAB: Введите drivingScenarioDesigner.
Создайте ведущий сценарий автомобиля, едущего по кривой дороге, и экспортируйте дорогу и модели автомобилей к рабочему пространству MATLAB. Для более подробного примера создания ведущего сценария смотрите Сборку Ведущий Сценарий и Сгенерируйте Синтетические Обнаружения.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
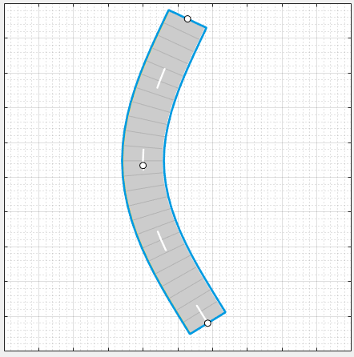
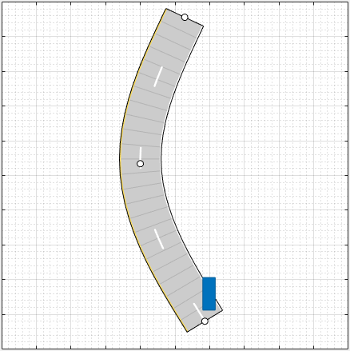
Создайте кривую дорогу. От панели инструментов приложения нажмите Add Road. Кликните по нижней части холста, расширьте дорожный путь к середине холста и кликните по холсту снова. Расширьте дорожный путь к верхней части холста, и затем дважды кликните, чтобы создать дорогу. Чтобы сделать кривую более комплексной, перетащите дорожные центры (открытые круги) или дважды кликните дорогу, чтобы добавить больше дорожных центров.
Добавьте маршруты в дорогу. На левой панели, на вкладке Roads, расширяют раздел Lanes. Установите Number of lanes на 2.
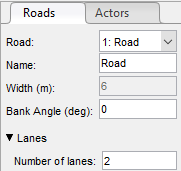
По умолчанию дорога является односторонней и имеет серьезные маркировки маршрута с обеих сторон, чтобы указать на плечо.
Добавьте автомобиль в одном конце дороги. От панели инструментов приложения выберите Add Actor> Car. Затем кликните по дороге, чтобы установить исходное положение автомобиля.
Установите ведущий путь автомобиля. Щелкните правой кнопкой по автомобилю, выберите Add Waypoints и добавьте waypoints для автомобиля, чтобы пройти. После того, как вы добавите последний waypoint, нажмите Enter. Автомобиль самовращается в направлении первого waypoint.
Настройте скорость автомобиля, когда это передает между waypoints. На левой панели, на вкладке Actors, в разделе Path, снимают флажок Constant Speed. Затем в таблице Waypoints, устанавливает скорость, v (m/s), автомобиля в m/s, когда это вводит каждый waypoint сегмент. Чтобы смоделировать более реалистические условия, увеличьте скорость автомобиля для прямых сегментов и уменьшите его скорость для изогнутых сегментов. Например:
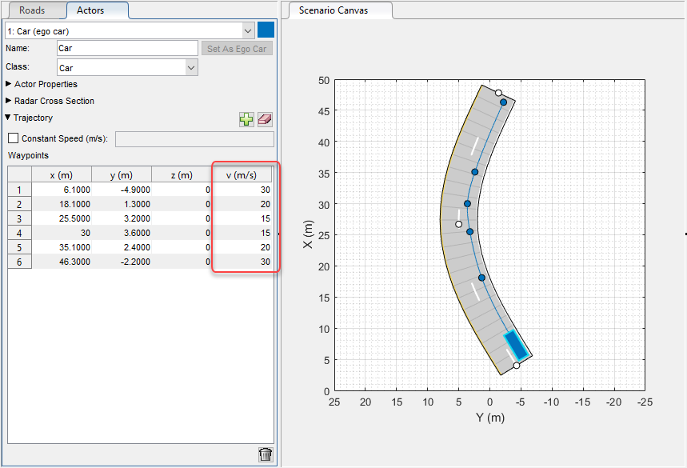
Запустите сценарий и настройте настройки по мере необходимости. Затем нажмите Save> Roads & Actors, чтобы сохранить дорогу и модели автомобилей к MAT-файлу.
Сгенерируйте обнаружения датчика видения из предварительно созданного ведущего сценария Евро тестовый протокол NCAP.
Для получения дополнительной информации на предварительно созданных сценариях, доступных из приложения, смотрите, Генерируют Синтетические Обнаружения из Предварительно созданного Ведущего Сценария.
Для получения дополнительной информации на доступном Евро сценарии NCAP, смотрите, Генерируют Синтетические Обнаружения от Евро Сценарий NCAP.
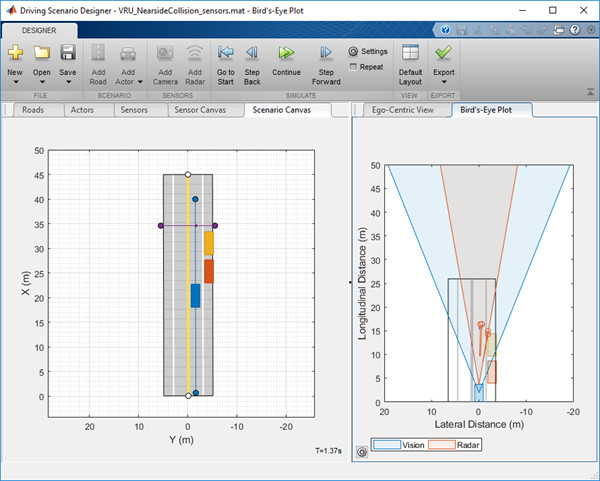
Загрузите Евро сценарий автономного экстренного торможения (AEB) NCAP столкновения с пешеходным дочерним элементом. Во время столкновения точка падения ракеты происходит 50% пути через ширину автомобиля.
path = fullfile(matlabroot,'toolbox','driving','drivingdata', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('AEB_PedestrianChild_Nearside_50width.mat') rmpath(path) % Remove folder from path
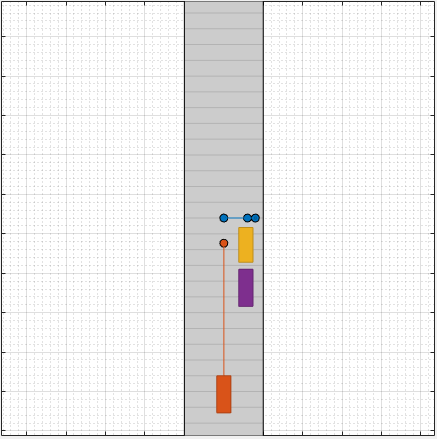
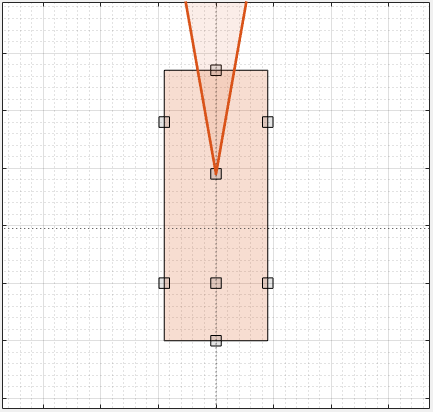
Добавьте обращенный к передней стороне радарный датчик в автомобиль, оборудованный датчиком. Сначала нажмите Add Radar. Затем на Sensor Canvas кликните по предопределенному местоположению датчика в переднем окне автомобиля. По умолчанию радар является длинным диапазоном.
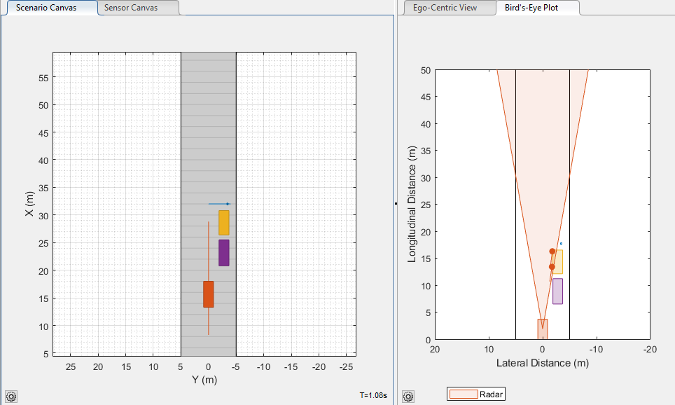
Запустите сценарий. В то время как симуляция сценария запускается, осмотрите различные аспекты симуляции путем переключения между холстами и представлениями. Можно переключиться между Sensor Canvas и Scenario Canvas и между Bird's-Eye Plot и Ego-Centric View.
Экспортируйте данные о датчике в рабочее пространство MATLAB. Нажмите Export > Export Sensor Data, введите имя переменной рабочей области и нажмите OK.
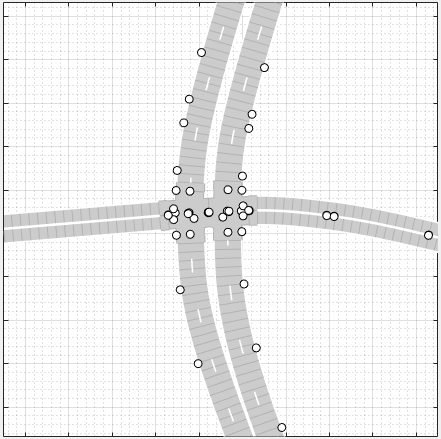
Импортируйте дорожную сеть OpenDRIVE в приложение Driving Scenario Designer. Для более подробного примера смотрите, Добавляют Дороги OpenDRIVE к Управлению Сценарием.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
От панели инструментов приложения выберите Open> OpenDRIVE Road Network. Затем от вашей корневой папки MATLAB перейдите к и откройте этот файл:
matlabroot/toolbox/driving/drivingdata/intersection.xodr
Евро ограничения NCAP
Сценарии систем помощи скорости (SAS) не поддержаны. Эти сценарии требуют обнаружения ограничений скорости от дорожных знаков, которые не поддерживает приложение.
Ограничения OpenDRIVE
Можно импортировать только маршруты и дороги. Импорт дорожных объектов и сигналов трафика не поддержан.
Файлы OpenDRIVE, содержащие большие дорожные сети, могут взять до нескольких минут, чтобы загрузить. Кроме того, эти дорожные сети могут вызвать медленные взаимодействия на холсте приложения. Примеры больших дорожных сетей включают единицы, которые моделируют дороги города или единиц с дорогами, которые являются тысячами метров долго.
Маршруты с переменными ширинами не поддержаны. Ширина установлена в самую высокую ширину, найденную в том маршруте. Например, если маршрут имеет ширину, которая отличается от 2 метров до 4 метров, приложение устанавливает ширину маршрута на 4 метра повсюду.
Дороги с несколькими стилями маркировки маршрута не поддержаны. Приложение применяет первую найденную маркировку стиля ко всем маршрутам на дороге. Например, если дорога имеет Dashed и маркировки маршрута Solid, приложение применяет маркировки маршрута Dashed повсюду.
Маршрут, отмечающий стили Bott Dots, Curbs и Grass, не поддержан. Маршруты с этими стилями маркировки импортируются как не отмеченные.
Можно отменить (нажмите Ctrl+Z), и восстановление (нажимают Ctrl+Y) изменения вы делаете на холстах датчика и сценарии. Например, можно использовать эти ярлыки, чтобы удалить недавно размещенный дорожный центр или восстановить перемещение радарного датчика.
Во время симуляции датчики камеры и радара по умолчанию обновляют каждые 100 мс (Update Interval (ms) = 100). Гарантировать, что выборки приложения и отображения обнаружения, найденные в этих интервалах, интервал обновления, должны быть целочисленным кратным шаг расчета приложения. По умолчанию приложение выбирает симуляцию каждые 10 мс (Sample Time (ms) = 10). Для получения дополнительной информации на шаге расчета приложения, смотрите Шаг расчета.
[1] Европейская новая автомобильная программа оценки. Евро протокол оценки NCAP - SA. Версия 8.0.2. Январь 2018.
[2] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP AEB C2C. Версия 2.0.1. Январь 2018.
[3] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP LSS. Версия 2.0.1. Январь 2018.
[4] Дюпюи, Мариус, и др. Спецификация Формата OpenDRIVE. Версия 1.4, Выпуск H, Документ № VI2014.106. Бад-Айблинг, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015.
Видимый с большого расстояния осциллограф | Читатель сценария | drivingScenario | radarDetectionGenerator | visionDetectionGenerator
