Моделируйте переключение между несколькими явными контроллерами MPC
Библиотека Simulink MPC
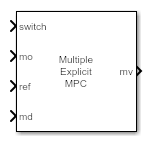
Блок Multiple Explicit MPC Controllers использует следующие входные сигналы:
Измеренный объект выходные параметры (mo)
Ссылка или заданное значение (ref)
Измеренное воздействие объекта (md), если любой
Переключение сигнала (switch)
Переключающийся сигнал выбирает активный контроллер из числа списка двух или больше контроллеров кандидата. Однако для блока Multiple Explicit MPC Controllers, кандидаты являются явными диспетчерами MPC. Эти контроллеры уменьшают онлайновое вычислительное усилие при помощи закона о надзоре поиска по таблице во время каждого интервала управления вместо того, чтобы решить квадратичную программу. Для получения дополнительной информации смотрите Явный Контроллер MPC.
Блок Multiple Explicit MPC Controllers позволяет переходу между несколькими явными контроллерами MPC в режиме реального времени на основе текущих условий работы. Как правило, вы разрабатываете каждый контроллер для конкретной области операционного пробела. Используя доступные измерения, вы обнаруживаете текущую операционную область и выбираете соответствующий активный контроллер через импорт switch.
Чтобы повысить эффективность, неактивные контроллеры не оценивают свой закон о надзоре. Однако, чтобы обеспечить передачу bumpless между контроллерами, неактивные контроллеры продолжают выполнять оценку состояния.
Как для блока Multiple MPC Controllers, вы не можете отключить оценку для Нескольких Явных Контроллеров MPC. Один контроллер должен всегда быть активным.
Как блок Explicit MPC Controller, Несколько Явных Контроллеров MPC поддерживают только подмножество дополнительных функций MPC, как обрисовано в общих чертах в следующей таблице.
| Поддерживавшие функции | Неподдерживаемые функции |
|---|---|
|
|
Блок Multiple Explicit MPC Controller имеет следующие группировки параметра:
Контроллеры кандидата, заданные как:
Массив ячеек Явного контроллера MPC объекты. Используйте команду generateExplicitMPC, чтобы создать эти объекты.
Массив ячеек из символьных векторов, где каждый элемент является именем явного контроллера MPC объект в рабочей области MATLAB®.
Заданный массив должен содержать по крайней мере два контроллера кандидата. Первая запись в массиве ячеек является контроллером, который соответствует входному значению переключателя 1, второе соответствует входному значению переключателя 2 и так далее.
Дополнительные начальные состояния для каждого контроллера кандидата, заданного как:
Входной сигнал switch должен быть скалярным целым числом между 1 и n c, где n c является количеством заданных контроллеров кандидата. В каждый момент управления этот сигнал определяет активный контроллер. Значение переключателя 1 соответствует первой записи в массиве ячеек контроллеров кандидата, значение 2 соответствует второму контроллеру и так далее.
Если сигнал switch за пределами области значений 1 и n c, предыдущий контроллер, вывод сохраняется.
Если диспетчеры кандидата используют оценку состояния по умолчанию, этот импорт маркирован mo. Соедините этот импорт в измеренные выходные сигналы объекта.
Если ваши диспетчеры кандидата используют пользовательскую оценку состояния, проверяйте Use custom estimated states instead of measured outputs в раздел General. Проверка этой опции изменяет метку на этом импорте в x[k|k]. Соедините сигнал, обеспечивающий оценки состояния контроллера. (Состояние контроллера включает объект, воздействие и шумовые образцовые состояния.) Оценки предоставили во время, tk должен быть основан на измерениях и других доступных данных во время tk.
Все диспетчеры кандидата должны использовать ту же опцию оценки состояния, или значение по умолчанию или пользовательский. Когда вы используете пользовательскую оценку состояния, у всех контроллеров кандидата должна быть та же размерность.
В каждый момент управления сигнал ref должен содержать текущие ссылочные значения (цели или заданные значения) для выходных переменных ny, где ny является общим количеством выходных параметров, включая измеренные и неизмеренные выходные параметры. Поскольку этот блок не поддерживает ссылочный предварительный просмотр, ref не может быть задан как матрица.
Выходной порт mv обеспечивает сигнал, задающий переменные, которыми управляют, для управления объектом. Активный контроллер обновляет свой переменный вывод, которым управляют, в каждый момент управления использование закона о надзоре, содержавшегося в его явном контроллере MPC объект. Если оценка закона о надзоре перестала работать, этот сигнал неизменен; то есть, это сохранено в предыдущем успешном результате. Блок Multiple Explicit MPC Controller передает вывод активного контроллера к выходному порту mv.
Добавьте импорт (md), с которым можно соединить векторный сигнал, содержащий элементы nmd, где nmd является количеством измеренных воздействий.
Поскольку этот блок не поддерживает измеренный предварительный просмотр воздействия, md не может быть задан как матрица.
Добавьте импорт (ext.mv), с которым вы соединяете векторный сигнал, который содержит фактические переменные, которыми управляют, (MV), используемые на объекте. Все диспетчеры кандидата используют этот сигнал обновить их оценки состояния контроллера в каждом интервале управления. Используя этот импорт улучшает точность оценки состояния, когда MVS, используемый на объекте, отличается от MVS, вычисленного блоком, например, должным сигнализировать о насыщении или условии переопределения.
Для получения дополнительной информации смотрите соответствующий раздел страницы с описанием блока MPC Controller.
Добавьте выходной порт (status), который указывает ли последняя явная оценка закона о надзоре MPC, за которой следуют. Выходной порт обеспечивает скалярный сигнал, который имеет одно из следующих значений:
1 — Успешная явная оценка закона о надзоре
0 — Отказ: Один или несколько параметров закона о надзоре из области значений.
– 1 — Неопределенный: параметры Закона о надзоре были в допустимой области значений, но экстраполяция была необходима.
Если status или 0 или –1, выходной порт mv остается в последнем известном хорошем значении.
Добавьте выходной порт (region), обеспечивающий индекс многогранной области, используемой в последней явной оценке закона о надзоре (скаляр). Если оценка закона о надзоре перестала работать, сигнал в этом выходном порту равняется нулю.
Добавьте выходной порт (est.state) для оценок состояния контроллера, x[k|k], в каждый момент управления. Эти оценки включают объект, воздействие и шумовые образцовые состояния.
Замените mo на импорт x[k|k] для пользовательской оценки состояния, как описано в Необходимом Inports. Все диспетчеры кандидата должны использовать ту же опцию оценки состояния, или значение по умолчанию или пользовательский. Когда вы используете пользовательскую оценку состояния, у всех контроллеров кандидата должна быть та же размерность.
Задайте тип данных блока переменных, которыми управляют, как одно из следующего:
'double' Плавающая точка двойной точности (значение по умолчанию)
единственный Плавающая точка с одинарной точностью
Если вы реализуете блок на цели с одинарной точностью, задаете тип выходных данных как single.
Для примера симуляции с одинарной точностью и с двойной точностью и генерации кода для контроллера MPC, смотрите Симуляцию и Генерацию кода Используя Simulink Coder.
Чтобы просмотреть типы данных порта в модели, в Редакторе Simulink®, выбирают Display > Signals & Ports Port Data Types.
Используйте шаг расчета родительской подсистемы как шаг расчета блока. Выполнение так позволяет вам условно выполнять этот блок в Подсистеме вызова функций или Инициированных блоках Subsystem. Для примера смотрите Используя диспетчера MPC Блока В Вызове функции и Инициированных Подсистемах.
Необходимо выполнить Подсистему вызова функций или Инициированные блоки Subsystem на уровне частоты дискретизации контроллера. В противном случае вы видите неожиданные результаты.
Чтобы просмотреть шаг расчета блока, в Редакторе Simulink, выбирают Display > Sample Time. Выберите Colors, Annotations или All. Для получения дополнительной информации, информация о Шаге расчета вида на море (Simulink).
