

Кинематическое ограничение между двумя косоугольными корпусами механизма с угловыми осями вращения пересечения
Simscape / Мультитело / Механизмы и Связи / Механизмы

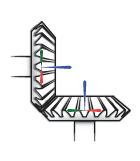
Блок Bevel Gear Constraint представляет кинематическое ограничение между двумя корпусами механизма с пересекающимися осями вращения, сохраненными под заданным углом. Основа и порты кадра последователя идентифицируют кадры связи на корпусах механизма. Оси вращения механизма совпадают с кадром связи z - оси. Механизмы вращаются в фиксированном скоростном отношении, определенном радиусами подачи механизма.
Блок представляет только кинематическую ограничительную характеристику косоугольной системе механизма. Инерция механизма и геометрия являются твердыми свойствами, что необходимо задать блоки Тела использования. Ограничительная модель механизма идеальна. Обратная реакция и потери механизма из-за кулонового и вязкого трения между зубами проигнорированы. Можно, однако, смоделировать вязкое трение в соединениях путем определения затухания коэффициентов в объединенных блоках.
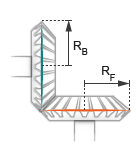
Косоугольное ограничение механизма параметризовано с точки зрения размерностей кругов подачи механизма. Круги подачи являются мнимыми кругами, концентрическими с корпусами механизма и касательной к зубной контактной точке. Радиусы подачи, маркировал RB и RF в фигуре, внешние радиусы, которые имели бы механизмы, если бы они уменьшались до конусов трения во взаимном контакте.
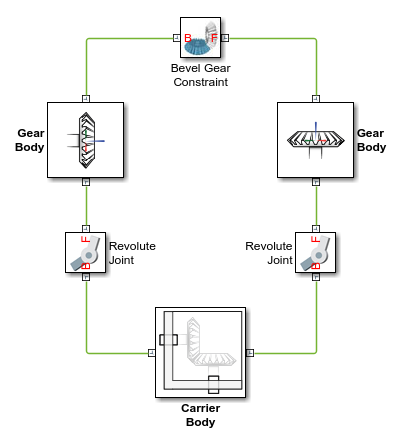
Ограничения механизма происходят в замкнутых кинематических кругах. Данные показывают топологию с обратной связью простой косоугольной модели механизма. Объединенные блоки соединяют корпуса механизма с общим фиксатором или поставщиком услуг, задавая максимальные степени свободы между ними. Блок Bevel Gear Constraint соединяет корпуса механизма, устраняя одну степень свободы и эффективно связывая движения механизма.
Блок вводит специальные ограничения для относительных положений и ориентаций кадров связи механизма. Ограничения гарантируют, что механизмы собираются только на расстояниях и углах, подходящих для того, чтобы сцепиться. Блок осуществляет ограничения во время образцового блока, когда это сначала пытается поместить механизмы в mesh, но полагается на остаток от модели, чтобы сохранить механизмы в mesh во время симуляции.
Ограничения положения
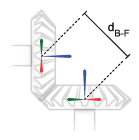
Расстояние между основой и источниками кадра последователя должно быть таково, что, под данным углом вала и радиусами подачи, круги подачи механизма являются касательной друг другу. Это расстояние, обозначенный d B-F, следует из закона косинусов:
где R B является радиусом подачи основного механизма, R F является радиусом подачи механизма последователя, и Вал θ является перекрестным углом между осями вращения.
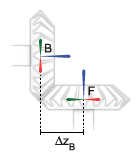
Расстояние между основой и источниками кадра последователя вдоль z - ось опорной рамы, обозначенный Δz B, должно быть равно:
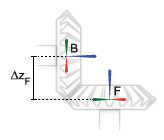
Расстояние между основой и источниками кадра последователя вдоль z - ось кадра последователя, обозначенный Δz F, должно быть равно:
Ограничения ориентации
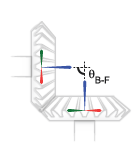
Мнимое расширение строк от основы и осей z последователя должно пересечься в угловом наборе вала в диалоговом окне блока. Угол обозначается θB-F в фигуре. Если параметр Shaft Axes устанавливается на Perpendicular, угол составляет 90 °.
Косоугольное ограничение механизма | Общее ограничение механизма | Установите в стойку и свяжите ограничение