

Кинематическое ограничение между двумя компланарными корпусами механизма шпоры с параллельными осями вращения
Simscape / Мультитело / Механизмы и Связи / Механизмы

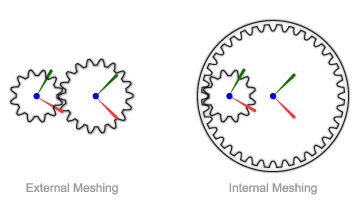
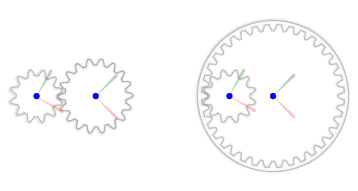
Блок Common Gear Constraint представляет кинематическое ограничение между двумя компланарными корпусами механизма шпоры с параллельными осями вращения. Запутывающий механизм может быть внешним к обоим механизмам или внутренним к одному из механизмов. Основа и порты кадра последователя идентифицируют кадры связи на корпусах механизма шпоры. Оси вращения механизма совпадают с кадром z - оси.
Блок представляет только кинематическую ограничительную характеристику системе механизма шпоры. Инерция механизма и геометрия являются твердыми свойствами, что необходимо задать блоки Тела использования. Ограничительная модель механизма идеальна. Обратная реакция и потери механизма из-за кулонового и вязкого трения между зубами проигнорированы. Можно, однако, смоделировать вязкое трение в соединениях путем определения затухания коэффициентов в объединенных блоках.
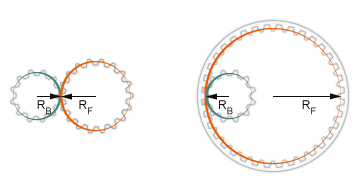
Общее ограничение механизма параметризовано с точки зрения размерностей кругов подачи механизма. Круг подачи является мнимым кругом, концентрическим с корпусом механизма и касательной к зубной контактной точке. Радиусы подачи, маркировал RB и RF в фигуре, радиусы, которые имели бы механизмы, если бы они уменьшались до цилиндров трения во взаимном контакте.
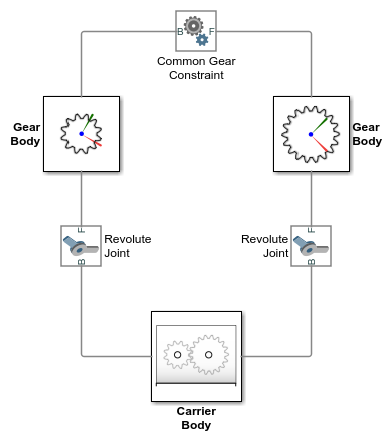
Ограничения механизма происходят в замкнутых кинематических кругах. Данные показывают топологию с обратной связью простой общей модели механизма. Объединенные блоки соединяют корпуса механизма с общим фиксатором или поставщиком услуг, задавая максимальные степени свободы между ними. Блок Common Gear Constraint соединяет корпуса механизма, устраняя одну степень свободы и эффективно связывая два движения механизма.
Блок вводит специальные ограничения для относительных положений и ориентаций кадров связи механизма. Ограничения гарантируют, что механизмы собираются только на расстояниях и углах, подходящих для того, чтобы сцепиться. Блок осуществляет ограничения во время образцового блока, когда это сначала пытается поместить механизмы в mesh, но полагается на остаток от модели, чтобы сохранить механизмы в mesh во время симуляции.
Ограничения положения
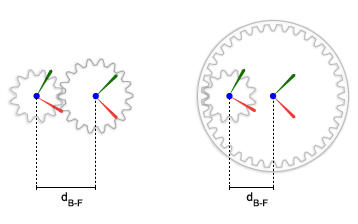
Расстояние между z - оси основы и кадром последователя, обозначенный d B-F в фигуре, должно равняться расстоянию между центрами механизма. Это ограничение гарантирует, что оси вращения механизмов на соответствующем расстоянии для того, чтобы сцепиться.
Источник кадра последователя должен лечь на плоскость xy опорной рамы. Это ограничение гарантирует, что круг подачи одного механизма является компланарным с кругом подачи другого.
Ограничения ориентации
z - оси основы и кадров последователя должны указать в том же направлении. Это ограничение гарантирует, что оси вращения механизма параллельны друг другу. Данные показывают z - оси основы и кадров последователя, указывающих из экрана.
Косоугольное ограничение механизма | Установите в стойку и свяжите ограничение | Червь и ограничение механизма