Передаточная функция разомкнутого цикла в заданной точке с помощью интерфейса slLinearizer или slTuner
linsys = getLoopTransfer(s,pt)linsys = getLoopTransfer(s,pt,sign)linsys = getLoopTransfer(s,pt,temp_opening)linsys = getLoopTransfer(s,pt,temp_opening,sign)linsys = getLoopTransfer(___,mdl_index)[linsys,info]
= getLoopTransfer(___)linsys = getLoopTransfer(s,pt)slLinearizer или slTuner, s.
Программное обеспечение осуществляет все постоянные открытия цикла, заданные для s, когда это вычисляет linsys. Если вы сконфигурировали или s.Parameters или s.OperatingPoints, или оба, getLoopTransfer выполняет несколько линеаризации и возвращает массив передаточных функций цикла.
linsys = getLoopTransfer(s,pt,sign)linsys является передаточной функцией разомкнутого цикла позитивных откликов.
Установите sign на -1 вычислять передаточную функцию разомкнутого цикла отрицательной обратной связи для приложений, которые принимают определение отрицательной обратной связи linsys. Многие классический проект и аналитические методы, такие как Найквист или методы проектирования корневого годографа, используют соглашение отрицательной обратной связи.
Чувствительность с обратной связью в pt равна feedback(1,linsys,sign).
linsys = getLoopTransfer(s,pt,temp_opening)temp_opening. Используйте открытие, например, чтобы вычислить передаточную функцию цикла внутреннего цикла, измеренного во входе объекта, с открытым внешним циклом.
linsys = getLoopTransfer(s,pt,temp_opening,sign)
linsys = getLoopTransfer(___,mdl_index)mdl_index задает индекс линеаризации интереса, в дополнение к любому из входных параметров в предыдущих синтаксисах.
Используйте этот синтаксис для эффективной линеаризации, когда это необходимо чтобы получить передаточную функцию цикла только для подмножества пакетных результатов линеаризации.
Получите передаточную функцию цикла, вычисленную в e, для модели ex_scd_simple_fdbk.
Откройте модель ex_scd_simple_fdbk.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
![]()
В этой модели:
![]()
Создайте интерфейс slLinearizer для модели.
sllin = slLinearizer(mdl);
Чтобы получить передаточную функцию цикла в e, добавьте эту точку в sllin как аналитическая точка.
addPoint(sllin,'e');
Получите передаточную функцию цикла в e.
sys = getLoopTransfer(sllin,'e');
tf(sys)
ans = From input "e" to output "e": -3 ----- s + 5 Continuous-time transfer function.
Программное обеспечение добавляет линеаризацию вывод, повреждает цикл и добавляет вход линеаризации, de, в e.
![]()
sys является передаточной функцией от de до e. Поскольку программное обеспечение принимает позитивные отклики, оно возвращает sys как![]() .
.
Получите передаточную функцию цикла отрицательной обратной связи, вычисленную в e, для модели ex_scd_simple_fdbk.
Откройте модель ex_scd_simple_fdbk.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
![]()
В этой модели:
![]()
Создайте интерфейс slLinearizer для модели.
sllin = slLinearizer(mdl);
Чтобы получить передаточную функцию цикла в e, добавьте эту точку в sllin как аналитическая точка.
addPoint(sllin,'e');
Получите передаточную функцию цикла в e.
sys = getLoopTransfer(sllin,'e',-1);
tf(sys)
ans =
From input "e" to output "e":
3
-----
s + 5
Continuous-time transfer function.
Программное обеспечение добавляет линеаризацию вывод, повреждает цикл и добавляет вход линеаризации, de, в e.
![]()
sys является передаточной функцией от de до e. Поскольку третий входной параметр указывает на отрицательную обратную связь, программное обеспечение возвращает sys как![]() .
.
Получите передаточную функцию цикла для внутреннего цикла, вычисленного в e2, для модели scdcascade.
Откройте модель scdcascade.
mdl = 'scdcascade';
open_system(mdl);
![]()
Создайте интерфейс slLinearizer для модели.
sllin = slLinearizer(mdl);
Чтобы вычислить передаточную функцию цикла для внутреннего цикла, используйте сигнал e2 в качестве аналитической точки. Чтобы устранить эффекты внешнего цикла, повредите внешний цикл в y1m. Добавьте эти точки в sllin.
addPoint(sllin,{'e2','y1m'});
Получите передаточную функцию цикла внутреннего цикла в e2.
sys = getLoopTransfer(sllin,'e2','y1m');
Здесь, 'y1m', третий входной параметр, задает временное открытие цикла. Программное обеспечение принимает позитивные отклики, когда это вычисляет sys.
Предположим, что вы обрабатываете в пакетном режиме, линеаризуют модель scdcascade для нескольких передаточных функций. Для большей части линеаризации вы отличаетесь пропорциональное (Kp2) и интегральное усиление (Ki2) контроллера C2 в 10%-й области значений. В данном примере вычислите передаточную функцию цикла для внутреннего цикла в e2 для максимальных значений Kp2 и Ki2.
Откройте модель scdcascade.
mdl = 'scdcascade';
open_system(mdl);
![]()
Создайте интерфейс slLinearizer для модели.
sllin = slLinearizer(mdl);
Отличайтесь пропорциональное (Kp2) и интегральное усиление (Ki2) контроллера C2 в 10%-й области значений.
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid] = ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
Чтобы вычислить передаточную функцию цикла для внутреннего цикла, используйте сигнал e2 в качестве аналитической точки. Чтобы устранить эффекты внешнего цикла, повредите внешний цикл в y1m. Добавьте эти точки в sllin.
addPoint(sllin,{'e2','y1m'});
Определите индекс для максимальных значений Ki2 и Kp2.
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
Получите передаточную функцию цикла внутреннего цикла в e2 с открытым внешним циклом.
sys = getLoopTransfer(sllin,'e2','y1m',-1,mdl_index);
Четвертый входной параметр задает отрицательную обратную связь для вычисления передачи цикла.
Открытая модель Simulink.
mdl = 'watertank';
open_system(mdl)
![]()
Создайте набор опции линеаризации и установите опцию StoreOffsets.
opt = linearizeOptions('StoreOffsets',true);
Интерфейс Create slLinearizer.
sllin = slLinearizer(mdl,opt);
Добавьте аналитическую точку в выходном порту корпуса.
addPoint(sllin,'watertank/Water-Tank System');
Вычислите передаточную функцию цикла в аналитической точке и получите соответствующие смещения линеаризации.
[sys,info] = getLoopTransfer(sllin,'watertank/Water-Tank System');
Просмотрите смещения.
info.Offsets
ans =
struct with fields:
x: [2x1 double]
dx: [2x1 double]
u: 1
y: 1
StateName: {2x1 cell}
InputName: {'watertank/Water-Tank System'}
OutputName: {'watertank/Water-Tank System'}
Ts: 0
pt — Аналитическая точка сигнализирует об имениАналитическая точка сигнализирует об имени, заданном как:
Вектор символов или строка — Аналитическая точка сигнализируют об имени.
Чтобы определить имя сигнала, сопоставленное с аналитической точкой, введите s. Программное обеспечение отображает содержимое s в командном окне MATLAB®, включая аналитические имена сигнала точки, имена блока и номера портов. Предположим, что аналитическая точка не имеет имени сигнала, но только имени блока и номера порта. Можно задать pt как имя блока. Чтобы использовать точку не в списке аналитических точек для s, сначала добавьте точку с помощью addPoint.
Можно задать pt как исключительно соответствующий фрагмент полного имени сигнала или имени блока. Предположим, что полным именем сигнала аналитической точки является 'LoadTorque'. Можно задать pt как 'Torque', пока 'Torque' не является фрагментом имени сигнала ни для какой другой аналитической точки s.
Например, pt = 'y1m'.
Массив ячеек из символьных векторов или массив строк — Задают несколько аналитических имен точки. Например, pt = {'y1m','y2m'}.
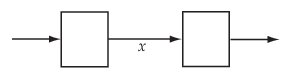
Чтобы вычислить linsys, программное обеспечение добавляет линеаризацию вывод, сопровождаемый пропуском цикла, и затем входом линеаризации в pt. Рассмотрите следующую модель:
Задайте pt как 'u'.
Программное обеспечение вычисляет linsys как передаточную функцию от du до u.
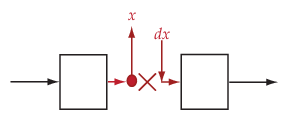
Если вы задаете pt как несколько сигналов, например, pt = {'u','y'}, программное обеспечение добавляет линеаризацию вывод, пропуск цикла и вход линеаризации в каждой точке.
![]()
du и dy являются входными параметрами линеаризации, и, u и y являются линеаризацией выходные параметры. Программное обеспечение вычисляет linsys как передаточную функцию MIMO с передаточной функцией от каждого входа линеаризации до каждой линеаризации вывод.
знак Знак обратной связи+1 (значение по умолчанию) | -1Знак обратной связи, заданный как одно из следующих значений:
+1 (значение по умолчанию) — getLoopTransfer возвращает передаточную функцию разомкнутого цикла позитивных откликов.
-1 — getLoopTransfer возвращает передаточную функцию разомкнутого цикла отрицательной обратной связи. Передаточная функция отрицательной обратной связи является временами -1 передаточная функция позитивных откликов.
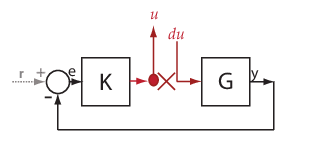
loop transfer function в точке является передаточной функцией разомкнутого цикла "точка-точка" от аддитивного воздействия в точке к измерению в той же точке.
Чтобы вычислить передаточную функцию цикла в аналитической точке, x, программное обеспечение добавляет линеаризацию вывод, вставляет пропуск цикла и добавляет вход линеаризации, dx. Программное обеспечение вычисляет передаточную функцию от dx до x, который равен передаточной функции цикла в x.
| Аналитическая точка в модели Simulink | Как getLoopTransfer интерпретирует аналитическую точку | Передаточная функция цикла |
|---|---|---|
|
|
| Передаточная функция от |
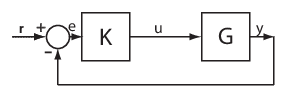
Например, рассмотрите следующую модель, где вы вычисляете передаточную функцию цикла в e:
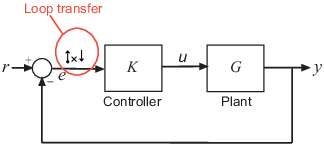
Здесь, в e, программное обеспечение добавляет линеаризацию вывод, вставляет пропуск цикла и добавляет вход линеаризации, de. Передаточная функция цикла в e, L, является передаточной функцией от de до e. L вычисляется можно следующим образом:
Чтобы вычислить-KG, используйте u в качестве аналитической точки для getLoopTransfer.
Программное обеспечение не изменяет модель Simulink, когда это вычисляет передаточную функцию цикла.
addOpening | addPoint | getCompSensitivity | getIOTransfer | getSensitivity | slLinearizer | slTuner