Этот пример готовых узлов представляет полную модель динамики аппарата перенесение маневру изменения двойного маршрута согласно стандартному ISO 3888-2 [1]. Можно создать собственные версии, устанавливание среды, чтобы протестировать тот автомобиль соответствует конструктивным требованиям при нормальных и экстремальных условиях движения. Используйте пример готовых узлов, чтобы анализировать поездку на автомобиле и обработку и разработать средства управления шасси. Чтобы выполнить исследования автомобиля, включая пределы устойчивости и поперечного ускорения отклонения от курса, используют этот пример готовых узлов.
ISO 3888-21 задает маневр изменения двойного маршрута, чтобы проверить производительность предотвращения препятствия автомобиля. В тесте, драйвере:
Ускоряется, пока автомобиль не врезается в целевую скорость
Отпускает педаль акселератора
Руль поворотов, чтобы следовать за путем в левый маршрут
Руль поворотов, чтобы следовать за путем назад в правильный маршрут
Как правило, конусы отмечают контуры маршрута. Если автомобиль и драйвер могут согласовать маневр, не врезаясь в конус, автомобиль проходит тест.
Чтобы протестировать продвинутые системы помощи водителю (ADAS) и восприятие автоматизированного управления (AD), планирование и программное обеспечение управления, можно запустить маневр в 3D среде. Для 3D требований платформы механизма визуализации и рекомендаций по аппаратным средствам, смотрите 3D Требования Engine Визуализации.
Чтобы создать и открыть рабочую копию двойного маршрута изменяют проект примера готовых узлов, входят
Эта таблица суммирует блоки и подсистемы в примере готовых узлов. Некоторые подсистемы содержат варианты.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Генератор ссылки изменения маршрута | Генерирует дорожные знаки для подсистемы визуализации и сигналы траектории для Прогнозирующего Блока драйверов | |
Прогнозирующий драйвер | Генерирует нормированное регулирование, ускорение и торможение команд, которые отслеживают ссылочную траекторию | |
Среда | Ветер реализаций и наземные войска | ✓ |
Контроллеры | Контроллеры реализаций для блоков управления двигателем (ЭКЮ), передачи и тормоза | ✓ |
Пассажирский автомобиль | Реализует:
| ✓ |
Визуализация | Обеспечивает траекторию автомобиля, ответ драйвера и 3D визуализацию | ✓ |
Чтобы заменить вариант по умолчанию, выберите View> Variant Manager. В Различном менеджере перейдите к варианту, который вы хотите использовать. Щелкните правой кнопкой и выберите Override using this Choice.
Используйте блок Lane Change Reference Generator, чтобы сгенерировать:
Дорожные знаки для подсистемы Визуализации — левые и правые контуры маршрута являются функцией параметра Vehicle width.
Скорость и боковая ссылка сигнализируют для Прогнозирующего Блока драйверов — Использование Lateral reference position breakpoints и параметры Lateral reference data задавать боковую ссылочную траекторию как функцию продольного расстояния.
Чтобы задать целевую скорость, используйте параметр Longitudinal entrance velocity setpoint.
Чтобы запустить маневр, заданное расстояние после автомобиля достигает целевой скорости, задайте параметр Distance after target speed to begin reference.
Пример готовых узлов использует Прогнозирующий Блок драйверов, чтобы сгенерировать нормированное регулирование, ускорение и торможение команд, которые отслеживают ссылочную траекторию.
Прогнозирующие реализации Блока драйверов оптимальный предварительный просмотр одно точки (предусматривают) модель управления, разработанную К. К. Макэдэмом [2], [3], [4]. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов, чтобы следовать за предопределенным путем.
Подсистема Среды генерирует ветер и наземные войска. Пример готовых узлов имеет эти варианты среды.
| Среда | Вариант | Описание |
|---|---|---|
Оснуйте обратную связь |
| Блок Vehicle Terrain Sensor использования, чтобы реализовать трассировку лучей в 3D среде |
| Реализует постоянное значение трения |
Подсистема Контроллеров генерирует крутящий момент механизма, механизм передачи и команды тормоза. Пример готовых узлов имеет эти варианты тормоза.
| Контроллер | Вариант | Описание |
|---|---|---|
Управление тормозным давлением |
| Контроллер обратной связи антиблокировочной тормозной системы (ABS), который переключается между двумя состояниями |
| Тормозной контроллер разомкнутого цикла |
Пассажирская подсистема Автомобиля имеет механизм, контроллеры и кузов с четырьмя колесами. А именно, автомобиль содержит эти подсистемы.
| Тело, приостановка, подсистема колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Автомобиль с четырьмя колесами:
|
PassVeh14DOF |
| Автомобиль с четырьмя колесами.
|
| Подсистемы двигателей | Вариант | Описание |
|---|---|---|
Сопоставленный Engine |
| Сопоставленный двигатель с искровым зажиганием |
Регулирование, передача, автомобильная трансмиссия и подсистема тормозов | Вариант | Описание | |
|---|---|---|---|
Идеал автомобильной трансмиссии фиксированный механизм | Модель Driveline | All Wheel Drive | Сконфигурируйте автомобильную трансмиссию для с приводом на все колеса, с передними ведущими колесами, или задний привод Задайте тип связи крутящего момента |
| |||
| |||
Передача |
| Идеал зафиксировал передачу механизма | |
Когда вы запускаете симуляцию, подсистема Визуализации обеспечивает драйвер, автомобиль и информацию об ответе. Пример готовых узлов регистрирует сигналы автомобиля во время маневра, включая регулирование, автомобиль и скорость вращения двигателя и поперечное ускорение. Можно использовать Инспектора Данных моделирования, чтобы импортировать регистрируемые сигналы и исследовать данные.
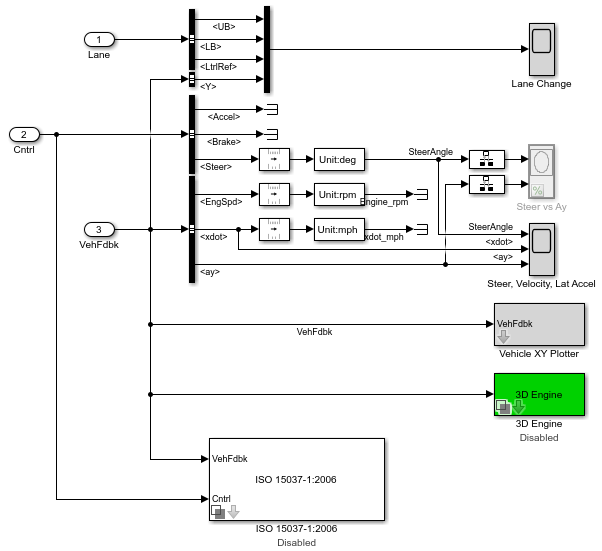
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Ответ автомобиля | Ответ автомобиля:
|
Блок Change Scope маршрута | Боковое смещение автомобиля по сравнению со временем:
|
Держитесь по сравнению с блоком Ay Scope | Регулирование угла по сравнению с поперечным ускорением |
Держитесь, Скорость, блок Lat Accel Scope |
|
Автомобиль плоттер XY | Автомобиль, продольный по сравнению с боковым расстоянием |
Блок ISO 15037-1:2006 | Отобразите сигналы измерения стандарта ISO в Инспекторе Данных моделирования, включая угол руля и крутящий момент, продольную и боковую скорость и угол заноса |
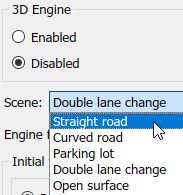
Опционально, можно включить или отключить 3D среду визуализации. Для 3D требований платформы механизма визуализации и рекомендаций по аппаратным средствам, смотрите 3D Требования Engine Визуализации. После того, как вы открываете пример готовых узлов, в подсистеме Визуализации, открываете 3D Блок двигателя. Установите эти параметры.
3D Engine к Enabled.
Scene к одной из сцен, например, Straight road.
Расположить автомобиль в сцену:
Выберите метод инициализации положения:
Recommended for scene — Установите начальное положение автомобиля на значения, рекомендуемые для сцены
User-specified — Установите свое собственное начальное положение автомобиля
Выберите Apply, чтобы изменить начальные параметры положения автомобиля.
Нажмите Update the model workspaces with the initial values, чтобы перезаписать начальное положение автомобиля в рабочих пространствах модели с прикладными значениями.
Когда вы запускаете симуляцию, просматриваете ответ автомобиля в окне VehicleSimulation.
Чтобы открыть и закрыть окно VehicleSimulation, используйте кнопки Stop и Simulink® Run. Если вы вручную закрываете окно VehicleSimulation, Simulink останавливает симуляцию с ошибкой.
Когда вы включаете 3D среду визуализации, вы не можете уступить симуляции.
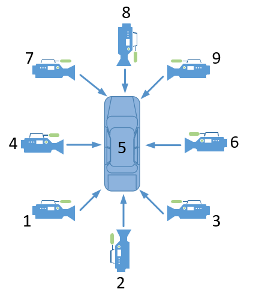
Чтобы изменить поля зрения камеры в окне VehicleSimulation, используйте эти ключевые команды.
| Ключ | Поле зрения камеры | |
|---|---|---|
1 | Назад оставленный |
|
2 | Назад | |
3 | Обратное право | |
4 | Левый | |
5 | Внутренний | |
6 | Право | |
7 | Передняя сторона оставлена | |
8 | Передняя сторона | |
9 | Переднее право | |
Чтобы вычислить динамику аппарата в Simulink, пример готовых узлов использует зафиксированный землей (инерционный), автомобиль, шина и системы координат колеса. К объектам положения в 3D среде пример готовых узлов использует систему мировой координаты.
Если вы включаете 3D среду, в Visualization> подсистема 3D Engine, пример готовых узлов:
Преобразовывает позицию центра массы (CM) автомобиля и вращение от зафиксированного землей (инерционного) к системе мировой координаты. А именно, подсистема использует эти преобразования —
Преобразование | CM автомобиля вдоль мировой Оси X | CM автомобиля вдоль мировой Оси Y | CM автомобиля вдоль мировой оси Z |
CM автомобиля вдоль зафиксированной землей Оси X | 1 | 0 | 0 |
CM автомобиля вдоль зафиксированной землей Оси Y | 0 | 1 | 0 |
CM автомобиля вдоль зафиксированной землей оси Z | 0 | 0 | -1 |
Преобразование | Вращение автомобиля вокруг мировой Оси X (список) | Вращение автомобиля вокруг мировой Оси Y (подача) | Вращение автомобиля вокруг мировой оси Z (отклонение от курса) |
Вращение автомобиля вокруг зафиксированной землей Оси X (список) | 1 | 0 | 0 |
Вращение автомобиля вокруг зафиксированной землей Оси Y (подача) | 0 | 1 | 0 |
Вращение автомобиля вокруг зафиксированной землей оси Z (отклонение от курса) | 0 | 0 | 1 |
Использует четыре набора положений колеса и вращений в зафиксированных шиной и зафиксированных автомобилем системах координат, чтобы определить положения и вращения в системе мировой координаты.
Положения колеса
Положение колеса вдоль системы мировой координаты | Значение |
|---|---|
Ось X | 0 |
Ось Y | 0 |
Ось Z | Положение колеса вдоль зафиксированной шиной ZT-оси, ориентации Z-up |
Вращения колеса
Положение колеса вдоль системы мировой координаты | Значение |
|---|---|
Ось X (список) | 0 |
Ось Y (подача) |
|
Ось Z (отклонение от курса) | Вращение колеса вокруг зафиксированного автомобилем (тело) ось z (отклонение от курса) |
[1] ISO 3888-2: 2011. Легковые автомобили — Испытательная площадка для серьезного маневра изменения маршрута.
[2] Щебеночное покрытие, C. C. "Оптимальное управление предварительным просмотром для линейных систем". Журнал динамических систем, измерения и управления. Издание 102, номер 3, 1980.
[3] Щебеночное покрытие, C. C. "Приложение оптимального управления предварительным просмотром для симуляции автомобильного управления с обратной связью". Транзакции IEEE в системах, человеке и кибернетике. Издание 11, номер 6, 1981.
[4] Щебеночное покрытие, C. C. "Разработка Драйвера/Автомобиля, Регулирующего Модели Взаимодействия для Динамического анализа". Итоговый Технический отчет UMTRI-88-53. Научно-исследовательский институт Транспортировки Мичиганского университета. 1988.
3D Engine | Сопоставленный Двигатель с искровым зажиганием | Прогнозирующий драйвер | Датчик ландшафта автомобиля