Этот пример готовых узлов представляет полную модель динамики аппарата перенесение руководящему маневру развернутого синуса. Можно создать собственные версии, служение основой, чтобы протестировать тот автомобиль соответствует конструктивным требованиям при нормальных и экстремальных условиях движения. Используйте пример готовых узлов, чтобы анализировать поездку на автомобиле и обработку и разработать средства управления шасси. Чтобы анализировать динамический руководящий ответ, используйте этот пример готовых узлов.
Развернутый синус, регулирующий маневр, тестирует частотную характеристику автомобиля на регулирование входных параметров. В тесте, драйвере:
Ускоряется, пока автомобиль не врезается в целевую скорость.
Управляет синусоидальным входом руля.
Линейно увеличьте частоту синусоидальной волны.
Чтобы протестировать продвинутые системы помощи водителю (ADAS) и восприятие автоматизированного управления (AD), планирование и программное обеспечение управления, можно запустить маневр в 3D среде. Для 3D требований платформы механизма визуализации и рекомендаций по аппаратным средствам, смотрите 3D Требования Engine Визуализации.
Чтобы создать и открыть рабочую копию развернутого синуса, регулирующего проект примера готовых узлов, войти
Эта таблица суммирует блоки и подсистемы в примере готовых узлов. Некоторые подсистемы содержат варианты.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Блок Swept Sine Reference Generator | Сгенерируйте синусоидальные руководящие команды для руководящего маневра развернутого синуса. | |
Продольный Блок драйверов | Генерирует нормированное ускорение и тормозящие команды, чтобы отследить скорость. | |
Среда | Ветер реализаций и дорожные силы. | ✓ |
Контроллеры | Контроллеры реализаций для блоков управления двигателем (ЭКЮ), передачи и тормоза. | ✓ |
Пассажирский автомобиль | Реализует:
| ✓ |
Визуализация | Обеспечивает траекторию автомобиля, ответ драйвера и 3D визуализацию. | ✓ |
Чтобы заменить вариант по умолчанию, выберите View> Variant Manager. В Различном менеджере перейдите к варианту, который вы хотите использовать. Щелкните правой кнопкой и выберите Override using this Choice.
Используйте блок Swept Sine Reference, чтобы сгенерировать синусоидальные руководящие команды для руководящего маневра развернутого синуса.
Longitudinal velocity setpoint — Целевая скорость
Steering amplitude — Синусоидальная амплитуда волны
Final frequency — Частота среза, чтобы остановить маневр
Чтобы отследить скорость автомобиля, Продольные реализации Блока драйверов оптимальный предварительный просмотр одно точки (предусматривают) модель управления, разработанную К. К. Макэдэм1, 2 года, 3. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов (смотрит вперед), чтобы следовать за предопределенным путем.
Подсистема Среды генерирует ветер и наземные войска. Пример готовых узлов имеет эти варианты среды.
| Среда | Вариант | Описание |
|---|---|---|
Оснуйте обратную связь |
| Блок Vehicle Terrain Sensor использования, чтобы реализовать трассировку лучей в 3D среде |
| Реализует постоянное значение трения |
Подсистема Контроллеров генерирует крутящий момент механизма, механизм передачи и команды тормоза. Пример готовых узлов имеет эти варианты тормоза.
| Контроллер | Вариант | Описание |
|---|---|---|
Управление тормозным давлением |
| Контроллер обратной связи антиблокировочной тормозной системы (ABS), который переключается между двумя состояниями |
| Тормозной контроллер разомкнутого цикла |
Пассажирская подсистема Автомобиля имеет механизм, контроллеры и кузов с четырьмя колесами. А именно, автомобиль содержит эти подсистемы.
| Тело, приостановка, подсистема колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Автомобиль с четырьмя колесами:
|
PassVeh14DOF |
| Автомобиль с четырьмя колесами.
|
| Подсистемы двигателей | Вариант | Описание |
|---|---|---|
Сопоставленный Engine |
| Сопоставленный двигатель с искровым зажиганием |
Регулирование, передача, автомобильная трансмиссия и подсистема тормозов | Вариант | Описание | |
|---|---|---|---|
Идеал автомобильной трансмиссии фиксированный механизм | Модель Driveline | All Wheel Drive | Сконфигурируйте автомобильную трансмиссию для с приводом на все колеса, с передними ведущими колесами, или задний привод Задайте тип связи крутящего момента |
| |||
| |||
Передача |
| Идеал зафиксировал передачу механизма | |
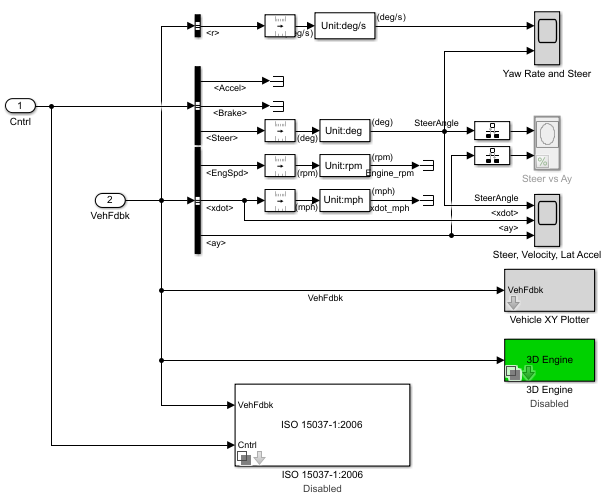
Когда вы запускаете симуляцию, подсистема Визуализации обеспечивает драйвер, автомобиль и информацию об ответе. Пример готовых узлов регистрирует сигналы автомобиля во время маневра, включая регулирование, автомобиль и скорость вращения двигателя и поперечное ускорение. Можно использовать Инспектора Данных моделирования, чтобы импортировать регистрируемые сигналы и исследовать данные.
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Ответ автомобиля | Ответ автомобиля:
|
Уровень отклонения от курса и блок Steer Scope | Уровень отклонения от курса и держащийся угол по сравнению со временем:
|
Держитесь по сравнению с блоком Ay Scope | Регулирование угла по сравнению с поперечным ускорением |
Держитесь, Скорость, блок Lat Accel Scope |
|
Автомобиль плоттер XY | График автомобиля, продольного по сравнению с боковым расстоянием |
Блок ISO 15037-1:2006 | Отобразите сигналы измерения стандарта ISO в Инспекторе Данных моделирования, включая угол руля и крутящий момент, продольную и боковую скорость и угол заноса |
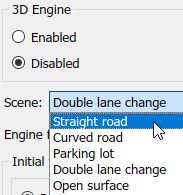
Опционально, можно включить или отключить 3D среду визуализации. Для 3D требований платформы механизма визуализации и рекомендаций по аппаратным средствам, смотрите 3D Требования Engine Визуализации. После того, как вы открываете пример готовых узлов, в подсистеме Визуализации, открываете 3D Блок двигателя. Установите эти параметры.
3D Engine к Enabled.
Scene к одной из сцен, например, Straight road.
Расположить автомобиль в сцену:
Выберите метод инициализации положения:
Recommended for scene — Установите начальное положение автомобиля на значения, рекомендуемые для сцены
User-specified — Установите свое собственное начальное положение автомобиля
Выберите Apply, чтобы изменить начальные параметры положения автомобиля.
Нажмите Update the model workspaces with the initial values, чтобы перезаписать начальное положение автомобиля в рабочих пространствах модели с прикладными значениями.
Когда вы запускаете симуляцию, просматриваете ответ автомобиля в окне VehicleSimulation.
Чтобы открыть и закрыть окно VehicleSimulation, используйте кнопки Stop и Simulink® Run. Если вы вручную закрываете окно VehicleSimulation, Simulink останавливает симуляцию с ошибкой.
Когда вы включаете 3D среду визуализации, вы не можете уступить симуляции.
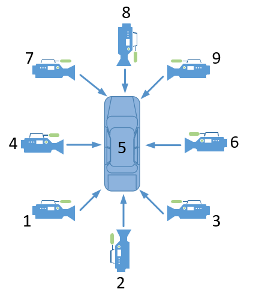
Чтобы изменить поля зрения камеры в окне VehicleSimulation, используйте эти ключевые команды.
| Ключ | Поле зрения камеры | |
|---|---|---|
1 | Назад оставленный |
|
2 | Назад | |
3 | Обратное право | |
4 | Левый | |
5 | Внутренний | |
6 | Право | |
7 | Передняя сторона оставлена | |
8 | Передняя сторона | |
9 | Переднее право | |
Чтобы вычислить динамику аппарата в Simulink, пример готовых узлов использует зафиксированный землей (инерционный), автомобиль, шина и системы координат колеса. К объектам положения в 3D среде пример готовых узлов использует систему мировой координаты.
Если вы включаете 3D среду, в Visualization> подсистема 3D Engine, пример готовых узлов:
Преобразовывает позицию центра массы (CM) автомобиля и вращение от зафиксированного землей (инерционного) к системе мировой координаты. А именно, подсистема использует эти преобразования —
Преобразование | CM автомобиля вдоль мировой Оси X | CM автомобиля вдоль мировой Оси Y | CM автомобиля вдоль мировой оси Z |
CM автомобиля вдоль зафиксированной землей Оси X | 1 | 0 | 0 |
CM автомобиля вдоль зафиксированной землей Оси Y | 0 | 1 | 0 |
CM автомобиля вдоль зафиксированной землей оси Z | 0 | 0 | -1 |
Преобразование | Вращение автомобиля вокруг мировой Оси X (список) | Вращение автомобиля вокруг мировой Оси Y (подача) | Вращение автомобиля вокруг мировой оси Z (отклонение от курса) |
Вращение автомобиля вокруг зафиксированной землей Оси X (список) | 1 | 0 | 0 |
Вращение автомобиля вокруг зафиксированной землей Оси Y (подача) | 0 | 1 | 0 |
Вращение автомобиля вокруг зафиксированной землей оси Z (отклонение от курса) | 0 | 0 | 1 |
Использует четыре набора положений колеса и вращений в зафиксированных шиной и зафиксированных автомобилем системах координат, чтобы определить положения и вращения в системе мировой координаты.
Положения колеса
Положение колеса вдоль системы мировой координаты | Значение |
|---|---|
Ось X | 0 |
Ось Y | 0 |
Ось Z | Положение колеса вдоль зафиксированной шиной ZT-оси, ориентации Z-up |
Вращения колеса
Положение колеса вдоль системы мировой координаты | Значение |
|---|---|
Ось X (список) | 0 |
Ось Y (подача) |
|
Ось Z (отклонение от курса) | Вращение колеса вокруг зафиксированного автомобилем (тело) ось z (отклонение от курса) |
[1] Щебеночное покрытие, C. C. "Оптимальное управление предварительным просмотром для линейных систем". Журнал динамических систем, измерения и управления. Издание 102, номер 3, сентябрь 1980.
[2] Щебеночное покрытие, C. C. "Приложение оптимального управления предварительным просмотром для симуляции автомобильного управления с обратной связью". Транзакции IEEE в системах, человеке и кибернетике. Издание 11, выпуск 6, июнь 1981.
[3] Щебеночное покрытие, C. C. Разработка Драйвера/Автомобиля, Регулирующего Модели Взаимодействия для Динамического анализа. Итоговый Технический отчет UMTRI-88-53. Анн-Арбор, Мичиган: Научно-исследовательский институт Транспортировки Мичиганского университета, декабрь 1988.
3D Engine | Продольный драйвер | Сопоставленный Двигатель с искровым зажиганием | Датчик ландшафта автомобиля