3-D местоположения неискаженных точек соответствующими через повторные изображения
xyzPoints = triangulateMultiview(pointTracks,cameraPoses,cameraParams)[xyzPoints,reprojectionErrors]
= triangulateMultiview(pointTracks,cameraPoses,cameraParams)xyzPoints = triangulateMultiview(pointTracks,cameraPoses,cameraParams)
[ также возвращает ошибки перепроекции для мировых точек.xyzPoints,reprojectionErrors]
= triangulateMultiview(pointTracks,cameraPoses,cameraParams)
Поддержка генерации кода:
Генерация кода поддержек: нет
Блок MATLAB function поддержек: Нет
Поддержка генерации кода, указания по применению и ограничения
Загрузите изображения.
imageDir = fullfile(toolboxdir('vision'),'visiondata',... 'structureFromMotion'); images = imageSet(imageDir);
Загрузите предварительно вычисленные параметры камеры.
load(fullfile(imageDir,'cameraParams.mat'));Вычислите функции первого изображения.
I = rgb2gray(read(images,1)); I = undistortImage(I,cameraParams); pointsPrev = detectSURFFeatures(I); [featuresPrev,pointsPrev] = extractFeatures(I,pointsPrev);
Загрузите местоположения камеры и ориентации.
load(fullfile(imageDir,'cameraPoses.mat'));Создайте объект viewSet.
vSet = viewSet; vSet = addView(vSet, 1,'Points',pointsPrev,'Orientation',... orientations(:,:,1),'Location',locations(1,:));
Вычислите функции и соответствия для остальной части изображений.
for i = 2:images.Count I = rgb2gray(read(images, i)); I = undistortImage(I, cameraParams); points = detectSURFFeatures(I); [features, points] = extractFeatures(I, points); vSet = addView(vSet,i,'Points',points,'Orientation',... orientations(:,:,i),'Location',locations(i,:)); pairsIdx = matchFeatures(featuresPrev,features,'MatchThreshold',5); vSet = addConnection(vSet,i-1,i,'Matches',pairsIdx); featuresPrev = features; end
Найдите дорожки точки.
tracks = findTracks(vSet);
Получите положения камеры.
cameraPoses = poses(vSet);
Найдите 3-D мировые точки.
[xyzPoints,errors] = triangulateMultiview(tracks,cameraPoses,cameraParams); z = xyzPoints(:,3); idx = errors < 5 & z > 0 & z < 20; pcshow(xyzPoints(idx, :),'VerticalAxis','y','VerticalAxisDir','down','MarkerSize',30); hold on plotCamera(cameraPoses, 'Size', 0.1); hold off

xyzPoints — 3-D мировые точки3-D мировые точки, заданные как N-by-3 массив [x, y, z] координаты.
Типы данных: single | double
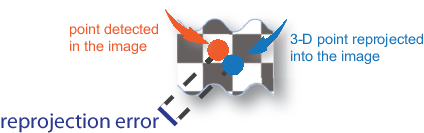
reprojectionErrors — Ошибки перепроекцииОшибки перепроекции, возвращенные как N-by-1 вектор. Функциональные проекты каждая мировая точка назад в оба изображения. Затем в каждом изображении, функция вычисляет ошибку перепроекции как расстояние между обнаруженным и повторно спроектированной точкой. Вектор reprojectionErrors содержит среднюю ошибку перепроекции для каждой мировой точки.
Поскольку triangulateMultiview не составляет искажение объектива, можно не исказить изображения прежде, чем обнаружить точки при помощи undistortImage. Также можно не исказить точки непосредственно с помощью undistortPoints.
[1] Хартли, R. и А. Зиссермен. "Несколько Геометрия Представления в Компьютерном зрении". Издательство Кембриджского университета, p. 312, 2003.
Camera Calibrator | bundleAdjustment | cameraParameters | estimateCameraParameters | pointTrack | relativeCameraPose | undistortImage | undistortPoints | viewSet
