Большая парковка 3D среда
Сцена Large Parking Lot является 3D средой большой парковки, которая содержит конусы, ограничения, дорожные знаки и припаркованные транспортные средства. Сцена представляется с помощью Нереального Engine® от Epic Games®.

Чтобы симулировать ведущий маневр в кривой дорожной 3D среде, в окне Simulink®, открывают блок Simulation 3D Scene Configuration. Используйте любую из этих настроек установки параметра.
Установите Scene description на Large parking lot.
Установите Scene description на Custom и Project name к VehicleSimulation.exe /Game/Maps/LargeParkingLot.
Сцена использует систему мировой координаты, чтобы определить местоположение объектов.
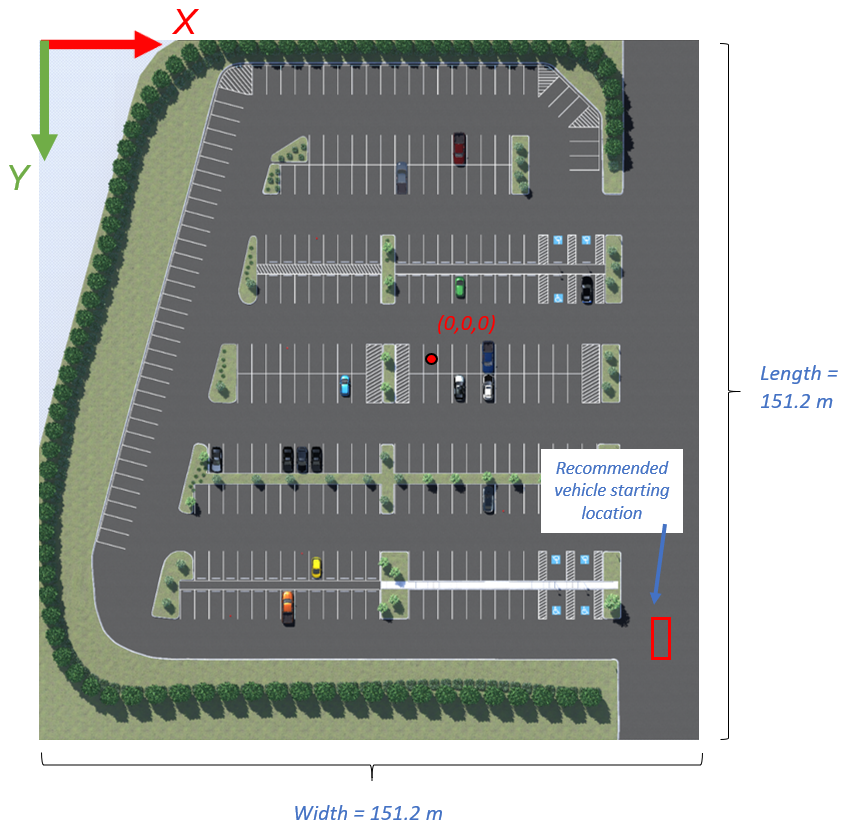
Эта таблица обеспечивает угловые местоположения области сцены в системе мировой координаты. Размерности находятся в m и градусе.
Местоположения | X M | Y M | Z M |
|---|---|---|---|
Сцена — Левый верхний | -78.6 | -73.5 | 0 |
Сцена — Правый нижний | 72.6 | 77.7 | 0 |
Эта таблица обеспечивает рекомендуемое стартовое местоположение для транспортного средства в системе мировой координаты. Размерности находятся в m и градусе.
Рекомендуемое стартовое местоположение | |||||
|---|---|---|---|---|---|
X M | Y M | Z M | Список (градус) | Подача (градус) | Отклонение от курса (градус) |
45.0 | 54.7 | 0 | 0 | 0 | -90 |
Этот рисунок показывает размерности парковочного места в m.

Эта таблица обеспечивает имена тега транспортного средства и начальные местоположения для других транспортных средств в сцене в системе мировой координаты. Размерности находятся в m и градусе.
Объект | Нереальный редактор Engine имя | Местоположения | |||||
|---|---|---|---|---|---|---|---|
X M | Y M | Z M | Список (градус) | Подача (градус) | Отклонение от курса (градус) | ||
Транспортное средство |
| 5.68 | -14.25 | 0.05 | 0 | 0 | -90 |
| 5.59 | -40.40 | 0.05 | 0 | 0 | 90 | |
| -5.35 | -34.87 | 0.05 | 0 | 0 | -90 | |
SM_MuscleCar | 29.70 | -13.80 | 0.05 | 0 | 0 | -90 | |
SM_PickupTruck3 | 11.10 | -0.9 | 0.05 | 0 | 0 | 90 | |
SM_SUVCar | 11.10 | 4.80 | 0.05 | 0 | 0 | -90 | |
SM_SedanCar4 | 5.60 | 4.80 | 0.05 | 0 | 0 | -90 | |
SM_Hatchback2 | -16.10 | 4.40 | 0.05 | 0 | 0 | -90 | |
SM_SedanCar | -21.50 | 18.40 | 0.05 | 0 | 0 | 90 | |
SM_SUVCar2 | -24.20 | 18.40 | 0.05 | 0 | 0 | 90 | |
SM_SedanCar2 | -26.90 | 18.40 | 0.05 | 0 | 0 | 90 | |
SM_SedanCar3 | -40.40 | 18.40 | 0.05 | 0 | 0 | 90 | |
SM_MuscleCar2 | 11.10 | 25.90 | 0.05 | 0 | 0 | -90 | |
SM_Hatchback3 | -21.50 | 38.90 | 0.05 | 0 | 0 | 90 | |
SM_PickupTruck4 | -27.00 | 46.40 | 0.05 | 0 | 0 | -90 | |
Эта таблица обеспечивает имена объектов и местоположения в системе мировой координаты. Размерности находятся в m и градусе.
Объект | Нереальный редактор Engine имя | Местоположение | |||||
|---|---|---|---|---|---|---|---|
X M | Y M | Z M | Список (градус) | Подача (градус) | Отклонение от курса (градус) | ||
|
| -21.43 | -23.41 | 0.05 | 0 | 0 | 0 |
| -24.20 | 36.19 | 0.05 | 0 | 0 | 0 | |
| -37.74 | 48.02 | 0.05 | 0 | 0 | 0 | |
| -26.97 | -2.68 | 0.05 | 0 | 0 | 0 | |
| 13.95 | 28.21 | 0.05 | 0 | 0 | 0 | |

Эта таблица обеспечивает имена объектов и местоположения в системе мировой координаты. Размерности находятся в m и градусе.
Объект | Нереальный редактор Engine имя | Местоположение | |||||
|---|---|---|---|---|---|---|---|
X M | Y M | Z M | Список (градус) | Подача (градус) | Отклонение от курса (градус) | ||
Дорожные знаки |
| 34.77 | 57.38 | 0.11 | 0 | 0 | 0 |
| 35.29 | 36.38 | 0.11 | 0 | 0 | 0 | |
| 35.28 | 15.955 | 0.11 | 0 | 0 | 180 | |
| 35.35 | -2.92 | 0.11 | 0 | 0 | 180 | |
| 35.69 | -23.64 | 0.11 | 0 | 0 | 0 | |
| 23.81 | 42.71 | 0.11 | 0 | 0 | 0 | |
| 29.21 | 42.71 | 0.11 | 0 | 0 | 0 | |
| 23.81 | 41.71 | 0.11 | 0 | 0 | 180 | |
| 29.21 | 41.71 | 0.11 | 0 | 0 | 180 | |
| 24.25 | -17.01 | 0.11 | 0 | 0 | 0 | |
| 29.69 | -17.01 | 0.11 | 0 | 0 | 0 | |
| 25.25 | -18.31 | 0.11 | 0 | 0 | 180 | |
| 29.69 | -18.31 | 0.11 | 0 | 0 | 180 | |
3D среда визуализации использует систему мировой координаты с осями, которые фиксируются в инерционной системе координат.
![]()
| Ось | Описание |
|---|---|
| X | Передайте направление транспортного средства Список — вращение, Выполненное правой рукой, вокруг Оси X |
| Y | Расширяет справа от транспортного средства, параллельного наземной плоскости Подача — вращение, Выполненное правой рукой, вокруг Оси Y |
| Z | Расширяет вверх Отклонение от курса — вращение, Выполненное левой рукой, вокруг оси Z |
