Разработка автоматизированных систем вождения требует данных о датчике из реалистических сценариев трафика. Путем генерации синтетических обнаружений датчика из симулированных ведущих сценариев можно быстро протестировать контроллеры или алгоритмы сплава датчика и настроить сценарий. Чтобы начать, используйте приложение Driving Scenario Designer, чтобы создать простой кубоид (сформированное поле) сценарии и статистические модели датчика радара и камеры. Затем вы можете:
Сгенерируйте синтетические обнаружения датчика и анализируйте выход.
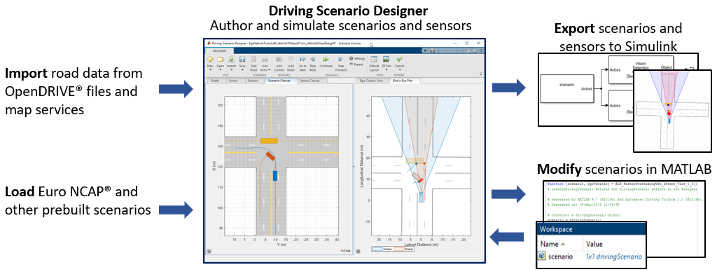
Экспортируйте код сценария в MATLAB® и сгенерируйте изменения сценария программно.
Экспортируйте сценарий и датчики к Simulink® и используйте их, чтобы протестировать ваши ведущие алгоритмы.
| Driving Scenario Designer | Спроектируйте ведущие сценарии, сконфигурируйте датчики и сгенерируйте синтетические обнаружения объектов |
| Bird's-Eye Scope | Визуализируйте покрытия датчика, обнаружения и дорожки |
Создайте ведущий сценарий и сгенерируйте синтетические обнаружения
Используйте приложение Driving Scenario Designer, чтобы создать ведущий сценарий и сгенерировать видение и радарные обнаружения датчика от него.
Предварительно созданные ведущие сценарии в Driving Scenario Designer
Протестируйте ведущие алгоритмы на предварительно созданных ведущих сценариях в приложении Driving Scenario Designer. Эти сценарии включают общее пересечение, поворот и шаблоны трафика разворота.
Импортируйте дороги OpenDRIVE в управление сценарием
Импортируйте дороги и маршруты от дорожной сети OpenDRIVE® в приложение Driving Scenario Designer или drivingScenario объект.
Импортируйте HD HERE живые дороги карты в управление сценарием
Импортируйте данные о дорогах из веб-сервиса HERE HD Live Map в приложение Driving Scenario Designer или drivingScenario объект.
Создайте ведущие изменения сценария программно
Программно создайте изменения ведущего сценария, который был создан с помощью приложения Driving Scenario Designer.
Управление примером по сценарию
Программно создайте основную истину ведущие сценарии для синтетических данных о датчике и алгоритмы отслеживания.
Сгенерируйте блоки обнаружения датчика Используя Driving Scenario Designer
Сгенерируйте блоки Simulink для ведущего сценария и датчиков, которые были созданы с помощью приложения Driving Scenario Designer.
Протестируйте алгоритм ADAS разомкнутого цикла Используя управление сценарием
Протестируйте алгоритмы ADAS разомкнутого цикла в Simulink при помощи ведущих сценариев, сохраненных из приложения Driving Scenario Designer.
Протестируйте алгоритм ADAS с обратной связью Используя управление сценарием
Протестируйте алгоритмы ADAS с обратной связью в Simulink при помощи ведущих сценариев, сохраненных из приложения Driving Scenario Designer.
Визуализируйте данные о датчике и дорожки в Bird ' s-Eye Scope
Визуализируйте покрытия датчика, обнаружения и дорожки в модели Simulink.




