Постройте обнаружения, дорожки и покрытия датчика вокруг транспортного средства
birdsEyePlot отображения объекта видимый с большого расстояния график 2D ведущего сценария в мгновенной близости автомобиля, оборудованного датчиком. Можно использовать этот график с датчиками, способными к обнаружению объектов и маршрутов.
Отобразить аспекты ведущего сценария на видимом с большого расстояния графике:
Создайте birdsEyePlot объект.
Создайте плоттеры для аспектов ведущего сценария, который вы хотите построить.
Используйте плоттеры с их соответствующими функциями построения графика, чтобы отобразить те аспекты на видимом с большого расстояния графике.
Эта таблица показывает функции плоттера, чтобы использовать на основе ведущего аспекта сценария, который вы хотите построить.
| Управление аспектом сценария, чтобы построить | Функция создания плоттера | Функция отображения плоттера |
|---|---|---|
| Зоны охвата датчика | coverageAreaPlotter | plotCoverageArea |
| Обнаружения датчика | detectionPlotter | plotDetection |
| Контуры маршрута | laneBoundaryPlotter | plotLaneBoundary |
| Маркировки маршрута | laneMarkingPlotter | plotLaneMarking |
| Объектные сетки | meshPlotter | plotMesh |
| Объектные основы | outlinePlotter | plotOutline, plotBarrierOutline |
| Путь к автомобилю, оборудованному датчиком | pathPlotter | plotPath |
| Облако точек | pointCloudPlotter | plotPointCloud |
| Результаты отслеживания объекта | trackPlotter | plotTrack |
Для примера того, как сконфигурировать и использовать видимый с большого расстояния график, смотрите, Визуализируют Покрытие Датчика, Обнаружения и Дорожки.
bep = birdsEyePlot
bep = birdsEyePlot(Name,Value)Name,Value парные аргументы. Например, birdsEyePlot('XLimits',[0 60],'YLimits',[-20 20]) отображает область, которая составляет 60 метров перед автомобилем, оборудованным датчиком и 20 метров любой стороне автомобиля, оборудованного датчиком. Заключите каждое имя свойства в кавычки.
Parent — Оси, на которых можно построитьОси, на которых можно построить в виде указателя осей. По умолчанию, birdsEyePlot возразите использует указатель текущей системы координат, который возвращен gca функция.
Plotters — Плоттеры создаются для видимого с большого расстояния графикаПлоттеры создаются для видимого с большого расстояния графика в виде массива объектов плоттера.
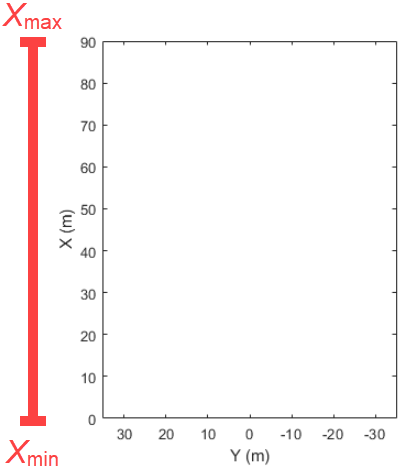
XLimits — X - область значений осиX- область значений оси видимого с большого расстояния графика, в транспортном средстве координирует в виде вектора с действительным знаком из формы [min X
X макс.]. Модули исчисляются в метрах. Если вы не задаете XLimits, затем график использует значения по умолчанию для родительских осей.
X - ось является вертикальной и положительной в прямом направлении автомобиля, оборудованного датчиком. Источник находится в центре задней оси автомобиля, оборудованного датчиком.
Для получения дополнительной информации о системе координат, используемой в видимом с большого расстояния графике, смотрите Систему координат Транспортного средства.
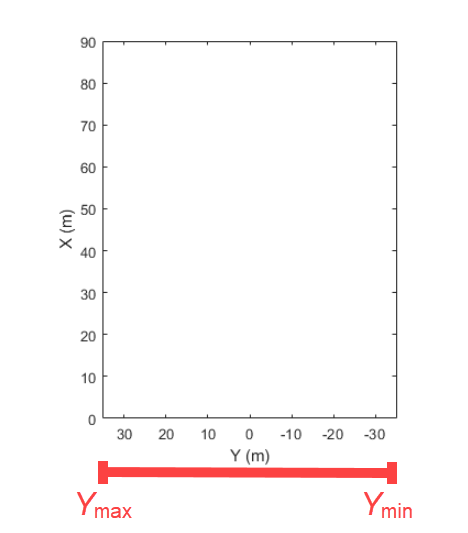
YLimits — Y - область значений осиY- область значений оси видимого с большого расстояния графика, в транспортном средстве координирует в виде вектора с действительным знаком из формы [min Y
Y макс.]. Модули исчисляются в метрах. Если вы не задаете YLimits, затем график использует значения по умолчанию для родительских осей.
Y - ось запускается горизонтально и положительна слева от автомобиля, оборудованного датчиком, как просматривается при направлении вперед. Источник находится в центре задней оси автомобиля, оборудованного датчиком.
Для получения дополнительной информации о системе координат, используемой в birdsEyePlot возразите, смотрите Систему координат Транспортного средства.
Создайте видимый с большого расстояния график с диапазоном оси X от 0 до 90 метров и диапазоном оси Y от –35 до 35 метров.
bep = birdsEyePlot('XLim',[0 90],'YLim',[-35 35]);

Отобразите зону охвата с полем зрения с 35 степенями и 60-метровой областью значений.
caPlotter = coverageAreaPlotter(bep,'DisplayName','Radar coverage area'); mountPosition = [1 0]; range = 60; orientation = 0; fieldOfView = 35; plotCoverageArea(caPlotter,mountPosition,range,orientation,fieldOfView);

Отобразите радарные обнаружения с координатами в (30, –5), (50, –10), и (40, 7).
radarPlotter = detectionPlotter(bep,'DisplayName','Radar detections'); plotDetection(radarPlotter,[30 -5; 50 -10; 40 7]);

Создайте видимый с большого расстояния график с областью значений оси X от 0 до 90 метров и диапазоном оси Y от –35 до 35 метров. Сконфигурируйте график включать радарный плоттер зоны охвата и плоттер обнаружения. Определите имена отображения этих плоттеров.
bep = birdsEyePlot('XLim',[0 90],'YLim',[-35 35]); coverageAreaPlotter(bep,'DisplayName','Radar coverage area'); detectionPlotter(bep,'DisplayName','Radar detections');

Используйте findPlotter определять местоположение плоттеров их именами отображения.
caPlotter = findPlotter(bep,'DisplayName','Radar coverage area'); radarPlotter = findPlotter(bep,'DisplayName','Radar detections');
Постройте зону охвата и обнаруженные объекты.
plotCoverageArea(caPlotter,[1 0],30,0,35); plotDetection(radarPlotter,[30 5; 30 -10; 30 15]);

Очистите данные из графика.
clearPlotterData(bep);

Функция прямоугольного изменения масштаба, где вы чертите прямоугольник, чтобы увеличить масштаб раздела фигуры, не работает на видимых с большого расстояния рисунках графика.
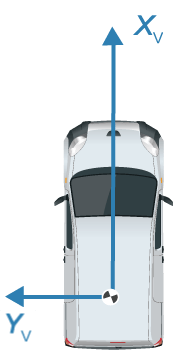
birdsEyePlot использует систему координат транспортного средства (X V, Y V), где:
V-ось X указывает вперед от автомобиля, оборудованного датчиком.
V-ось Y указывает налево, как просматривается при направлении вперед.
Источник находится в центре вращения автомобиля, оборудованного датчиком. Эта точка находится на дорожном покрытии ниже центра задней оси автомобиля, оборудованного датчиком.
Для получения дополнительной информации о системе координат транспортного средства, смотрите Системы координат в Automated Driving Toolbox.
