Укажите два облака точек с помощью алгоритма NDT
tform = pcregisterndt(moving,fixed,gridStep)gridStep.
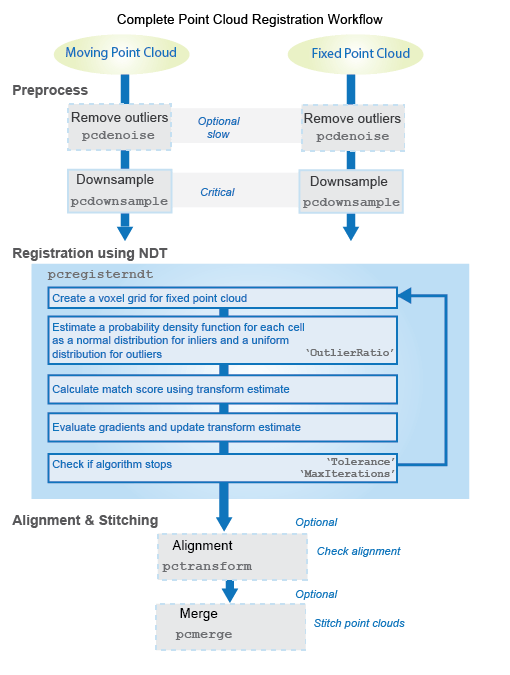
Регистрационный алгоритм основан [1]на
[2] алгоритма нормальных распределений преобразовывают (NDT). Лучшая эффективность этого итеративного процесса требует настраивающих свойств для ваших данных. Чтобы улучшить точность и КПД регистрации, рассмотрите субдискретизацию облаков точек при помощи pcdownsample перед использованием pcregisterndt.
[___] = pcregisterndt( дополнительные опции использования заданы одним или несколькими moving,fixed,gridStep,Name,Value)Name,Value парные аргументы.
Загрузите данные об облаке точек.
ld = load('livingRoom.mat'); moving = ld.livingRoomData{1}; fixed = ld.livingRoomData{2}; pcshowpair(moving,fixed,'VerticalAxis','Y','VerticalAxisDir','Down')

Чтобы повысить эффективность и точность регистрационного алгоритма NDT, проредите движущееся облако точек.
movingDownsampled = pcdownsample(moving,'gridAverage',0.1);Voxelize облако точек в кубы sidelength 0.5. Примените твердую регистрацию с помощью алгоритма NDT.
gridStep = 0.5; tform = pcregisterndt(movingDownsampled,fixed,gridStep);
Визуализируйте выравнивание.
movingReg = pctransform(moving,tform); pcshowpair(movingReg,fixed,'VerticalAxis','Y','VerticalAxisDir','Down')

[1] Бибер, P. и В. Стрэсер. “Преобразование Нормальных распределений: Новый Подход к Лазерному Сопоставлению сканов”. Продолжения Международной конференции IEEE/RSJ по вопросам Интеллектуальных Роботов и Систем (IROS). Лас-Вегас, NV. Издание 3, ноябрь 2003, стр 2743–2748.
[2] Магнуссон, M. “3D нормальные распределения преобразовывают — эффективное представление для регистрации, поверхностного анализа и обнаружения цикла”. Ph.D. Тезис. Университет Örebro, Örebro, Швеция, 2013.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcregistercorr | pcregistercpd | pcregistericp | pcshow | pcshowpair | pctransform