Эталонное приложение гибридного электромобиля представляет полную модель многомодового гибридного электромобиля (ГЭМ) с двигателем внутреннего сгорания, трансмиссией, аккумулятором, двигателем, генератором и соответствующими алгоритмами управления силовым агрегатом. Используйте эталонное приложение для анализа согласования силового агрегата и выбора компонентов, проектирования алгоритмов управления и диагностики, а также тестирования аппаратного обеспечения в контуре (HIL). Для создания и открытия рабочей копии проекта эталонного приложения гибридного электромобиля введите
По умолчанию многорежимное эталонное приложение HEV конфигурируется следующим образом:Отображенный двигатель и генератор
1.5-L динамический двигатель с искровым зажиганием (СИ)
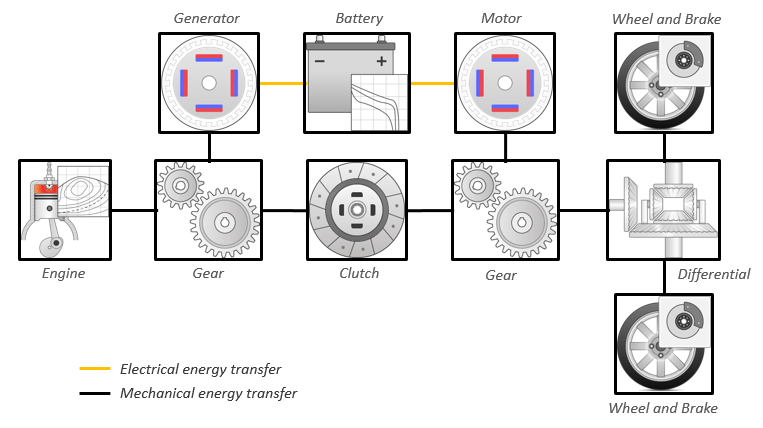
На этой схеме показана конфигурация силового агрегата.
В этой таблице описываются блоки и подсистемы в справочном приложении, указывающие, какие подсистемы содержат варианты. Для реализации вариантов модели ссылочное приложение использует подсистемы вариантов.
| Ссылочный элемент приложения | Описание | Варианты |
|---|---|---|
Анализ мощности и энергии |
Дважды щелкните Анализ мощности и энергии, чтобы открыть сценарий в реальном времени. Запустите сценарий для оценки энергопотребления и энергопотребления на уровне компонентов и системы. Дополнительные сведения о сценарии в реальном времени см. в разделе Анализ мощности и энергии. | НА |
Блок источника цикла диска - FTP75 (2474 секунды) | Создание стандартного или заданного пользователем профиля скорости цикла привода в зависимости от времени. Выход блока - выбранная или заданная продольная скорость транспортного средства. | ✓ |
| Создание переменных среды, включая уровень дороги, скорость ветра, температуру и давление в атмосфере. | |
|
Для создания нормализованных команд ускорения и торможения используется вариант продольного привода или разомкнутого контура.
| ✓ |
| Реализует модуль управления силовым агрегатом (PCM), содержащий гибридный модуль управления (HCM) и модуль управления двигателем (ECM). | ✓ |
| Реализует гибридный легковой автомобиль, содержащий подсистемы двигателя, электроустановки и трансмиссии. | ✓ |
| Отображает характеристики на уровне транспортного средства, состояние заряда аккумулятора (SOC), экономию топлива и результаты эмиссии, которые полезны для согласования силового агрегата и анализа выбора компонентов. |
Дважды щелкните Анализ мощности и энергии, чтобы открыть сценарий в реальном времени. Запустите сценарий для оценки энергопотребления и энергопотребления на уровне компонентов и системы. Дополнительные сведения о сценарии в реальном времени см. в разделе Анализ мощности и энергии.
Сценарий обеспечивает:
Общая сводка по энергии, которую можно экспортировать в электронную таблицу Excel ®.
КПД двигательной установки, электроустановки и трансмиссии, включая гистограмму времени, затраченного на различные КПД двигательной установки.
Регистрация данных для использования инспектора данных моделирования для анализа эффективности силового агрегата и сигналов передачи энергии.
Дополнительные сведения о сценарии в реальном времени см. в разделе Анализ мощности и энергии.
Drive Cycle Source блок генерирует целевую скорость транспортного средства для выбранного или заданного цикла привода. Ссылочное приложение имеет эти опции.
| Выбор времени | Вариант | Описание |
|---|---|---|
Время вывода выборки |
| Непрерывные команды оператора |
| Разовые команды оператора |
Longitudinal Driver подсистема формирует нормированные команды ускорения и торможения. Ссылочное приложение имеет эти варианты.
Варианты блоков | Описание | ||
|---|---|---|---|
Продольный драйвер (по умолчанию) | Контроль |
| Управление PI с отслеживанием усиления и усиления подачи вперед, которые являются функцией скорости транспортного средства. |
| Оптимальный режим просмотра в одной точке (просмотр вперед). | ||
| Пропорционально-интегральное (PI) управление с подачей сигнала слежения и усилением подачи вперед. | ||
Фильтр нижних частот (LPF) |
| Используйте LPF для ошибки целевой скорости для более плавного движения. | |
| Не используйте фильтр при ошибке скорости. | ||
Изменение |
| Диаграмма Stateflow ® моделирует планирование переключения передач в обратном, нейтральном и ведущем направлениях. | |
| Входная передача, состояние транспортного средства и обратная связь скорости формируют команды ускорения и торможения для отслеживания движения транспортного средства вперед и назад. | ||
| Нет передачи. | ||
| Модели диаграммы статофлоу с обратным, нейтральным, парковым и N-ступенчатым переключением передач. | ||
Разомкнутый контур | Подсистема управления с разомкнутым контуром. В подсистеме можно настроить команды ускорения, замедления, передачи и сцепления с постоянными или сигнальными входами. | ||
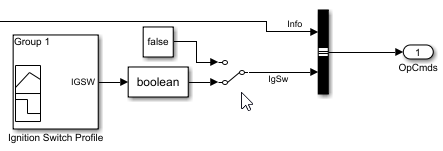
Для холостого хода двигателя в начале цикла привода и имитации света катализатора перед перемещением транспортного средства с помощью команды педали используйте вариант продольного привода. Подсистема продольного привода включает в себя профиль сигнала переключателя зажигания, IgSw. Контроллер двигателя использует сигнал переключателя зажигания для запуска как двигателя, так и таймера выключения катализатора.
Таймер отключения катализатора отменяет управление функцией остановки двигателя (ESS), пока таймер отключения катализатора подсчитывается. Во время моделирования, после IgSw время понижения достигает времени отключения катализатора CatLightOffTimeвозобновляется нормальная работа ESS. Если команда крутящего момента отсутствует до того, как моделирование достигнет EngStopTime, ESS выключает двигатель.
Для управления светом ESS и катализатора:
В подсистеме модели продольного привода установите профиль переключателя зажигания IgSw комуon'.
В рабочем пространстве модели контроллера двигателя задайте следующие параметры калибровки:
EngStopStartEnable - Включает ESS. Для отключения ESS установите значение false.
CatLightOffTime - Время простоя двигателя от запуска двигателя до выключения катализатора.
EngStopTime - время работы двигателя ESS после отсечения запроса крутящего момента модели водителя.
Controller подсистема имеет PCM с HCM и ECM.
Ссылочное приложение имеет эти варианты для ECM.
| Диспетчер | Вариант | Описание |
|---|---|---|
| ECM | SiEngineController (по умолчанию) | Контроллер двигателя SI |
CiEngineController | Контроллер двигателя CI |
HCM реализует динамический встроенный контроллер, который непосредственно определяет рабочую точку двигателя, что сводит к минимуму расход топлива (BSFC) для конкретных тормозов при удовлетворении или превышении мощности, требуемой подсистемами зарядки аккумуляторов и приведения в движение транспортного средства.
Для вычисления оптимальной рабочей точки двигателя по частоте вращения и крутящему моменту контроллер начинает с возможного набора дискретных уровней мощности двигателя. Для каждого кандидата уровня мощности блок имеет параметризованный вектор рабочих точек крутящего момента и скорости, которые минимизируют BSFC.
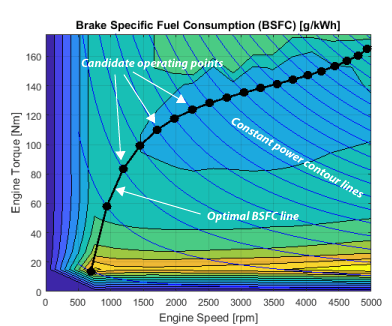
Затем оптимизатор удаляет кандидаты на уровень мощности, которые неприемлемы по любой из следующих причин:
Слишком много энергии передается через генератор на батарею.
Слишком мало мощности для удовлетворения требований к зарядной и двигательной подсистемам.
Из оставшихся кандидатов на уровень мощности контроллер выбирает тот, который имеет наименьшую BSFC. Затем контроллер посылает соответствующую команду крутящего момента/рабочей точки частоты вращения в двигатель.
Для реализации легкового автомобиля, Passenger Car подсистема содержит привод, электрическую установку и подсистемы двигателя. Для создания собственных вариантов механизма для ссылочного приложения используйте шаблоны проекта механизма CI и SI. Ссылочное приложение имеет эти варианты подсистемы.
| Подсистема привода | Вариант | Описание | |
|---|---|---|---|
Дифференциал и соответствие требованиям | All Wheel Drive | Настройте привод для всего колеса, переднего колеса или привода заднего колеса. Для варианта с полным приводом можно настроить тип крутящего момента муфты. | |
Front Wheel Drive (по умолчанию) | |||
Rear Wheel Drive | |||
Транспортное средство | Vehicle Body 3 DOF Longitudinal | Настройка для 3 степеней свободы | |
Колеса и тормоза |
| Для штурвалов можно настроить тип:
Для обеспечения рабочих характеристик и ясности, чтобы определить продольную силу каждого колеса, варианты реализуют блок продольного колеса. Для определения общей продольной силы всех колес, действующих на ось, варианты используют масштабный коэффициент для умножения силы одного колеса на число колес на оси. Используя этот подход для расчета общей силы, варианты предполагают одинаковую проскальзывание шины и нагрузку на переднюю и заднюю оси, что является обычным для исследований продольного силового агрегата. Если это не так, например, когда трения или нагрузки различаются на левой и правой сторонах осей, используйте уникальные блоки продольного колеса для вычисления независимых сил. Однако использование уникальных блоков для моделирования каждого колеса увеличивает сложность модели и вычислительные затраты. | |
| |||
| Подсистема электроустановки | Вариант | Описание |
|---|---|---|
| Батарея | BattHevMm (по умолчанию) | Конфигурация с электрической батареей |
| Генератор | GenMapped (по умолчанию) | Сопоставленный генератор |
GenDynamic | Внутренний синхронный двигатель постоянного магнита (PMSM) с контроллером | |
| Двигатель | MotMapped (по умолчанию) | Сопоставленный двигатель с неявным контроллером |
MotDynamic | Внутренний синхронный двигатель постоянного магнита (PMSM) с контроллером |
| Подсистема двигателя | Вариант | Описание | |
|---|---|---|---|
| Двигатель |
| Динамичный основной двигатель SI с турбокомпрессором | |
| Динамический атмосферный двигатель ядра SI | ||
| Динамический двухтурбо-однозаборный двигатель SI V | ||
| Динамический двигатель SI V | ||
| Динамический двигатель двойного впуска SI V Twin-Turbo | ||
| Сопоставленный модуль СИ с неявным турбокомпрессором | ||
| Механизм глубокого обучения SI | ||
| Динамичный основной двигатель CI с турбокомпрессором | ||
| Сопоставленный двигатель CI с неявным турбокомпрессором | ||
[1] Хигути, Н., Симада, Х., Сунага, Я. и Танака, М., Разработка новой двухмоторной гибридной системы Plug-In. Технический документ SAE 2013-01-1476. Warrendale, PA: SAE International Journal of Alternative Powertrains, 2013.
Контроллер CI | Ядро CI | Лист технических данных Аккумулятор | Источник цикла диска | Внутренний контроллер PM | Внутренняя PMSM | Продольный привод | Сопоставленный модуль CI | Сопоставленный механизм СИ | Контроллер СИ | Модуль ядра SI
