В этом примере показано, как возникают внутренние задержки при соединении моделей с задержками ввода, вывода или переноса.
Создайте модель следующей архитектуры управления:
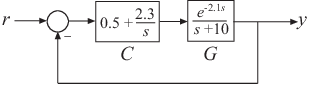
G - модель установки, которая имеет задержку ввода. C является пропорционально-интегральным (PI) контроллером.
Чтобы создать модель, представляющую отклик замкнутого цикла этой системы, выполните следующие действия.
Создание завода G и контроллер C.
G = tf(1,[1 10],'InputDelay',2.1); C = pid(0.5,2.3);
C имеет пропорциональное усиление 0,5 и интегральное усиление 2,3.
Использовать feedback вычислить отклик замкнутого цикла от r до y.
T = feedback(C*G,1);
Временная задержка в T не является входной задержкой, как в G. Поскольку временная задержка является внутренней для системы с замкнутым контуром, программное обеспечение возвращается T как ss модель с внутренней временной задержкой 2,1 секунды.
Примечание
В дополнение к feedback, любая функция соединения системы (включая parallel и series) может привести к внутренним задержкам.
T - точное представление обратной реакции, а не аппроксимация. Для доступа к внутреннему значению задержки введите:
T.InternalDelay
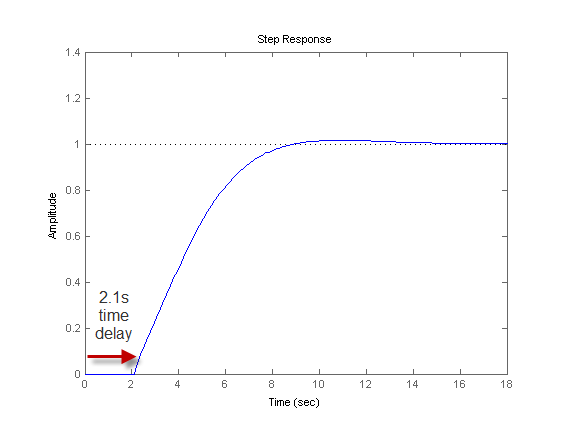
График шага Т подтверждает наличие временной задержки:
step(T)
Примечание
Большинство команд анализа, таких как step, bode и margin, поддерживать модели с внутренними задержками.
Внутренняя временная задержка сохраняется в InternalDelay имущество T. Использовать точечную нотацию для доступа InternalDelay. Например, чтобы изменить внутреннюю задержку на 3,5 секунды, введите:
T.InternalDelay = 3.5
Невозможно изменить количество внутренних задержек, поскольку они являются структурными свойствами модели.
