В этом примере показано, как использовать требования к конструкции частотной области для оптимизации отклика системы LTI в приложении Control System Designer.
При использовании с программным обеспечением Control System Toolbox™ можно задать требования к проектированию Simulink ® Design Optimization™ или ограничения для графиков в приложении Control System Designer (Control System Toolbox). Можно включить требования к проектированию для оптимизации отклика в частотной и временной областях.
Можно задать требования к конструкции частотной области для оптимизации сигналов отклика для любой модели, разработанной в приложении Control System Designer, например:
Модели LTI командной строки, созданные с помощью команд панели инструментов системы управления
Модели Simulink, линеаризованные с помощью программного обеспечения Simulink Control Design™
В этом примере используется линеаризованная версия модели Simulink. srotut1.

Методы оптимизации используются для проектирования компенсатора таким образом, чтобы система с замкнутым контуром соответствовала следующим проектным спецификациям при возбуждении системы с помощью ввода шага единицы измерения:
Максимальное 30-секундное время отстаивания
Максимальное превышение на 10%
Максимальное 10-секундное время подъема
Предел ± 0,7 на сигнале исполнительного механизма
В srotut1 модель установки состоит из коэффициента усиления, ограниченного интегратора, передаточной функции и блока задержки передачи.
Проектирование компенсатора функции передачи с разомкнутым контуром линеаризованного srotut1 модель. Линеаризовавший srotut1 модель установки состоит из коэффициента усиления, неограниченного интегратора, передаточной функции и аппроксимации Паде к транспортной задержке.
Создание функции передачи с разомкнутым контуром на основе линеаризованного srotut1 введите следующие команды.
w0 = 1; zeta = 1; Kint = 0.5; Tdelay = 1; [delayNum,delayDen] = pade(Tdelay,1); integrator = tf(Kint,[1 0]); transfer_fcn = tf(w0^2,[1 2*w0*zeta w0^2]); delay_block = tf(delayNum,delayDen); open_loopTF = integrator*transfer_fcn*delay_block;
Если модель завода представляет собой массив моделей (панель инструментов системы управления), контроллер предназначен только для номинальной модели. Можно также проанализировать конструкцию элемента управления для остальных моделей в массиве. Дополнительные сведения см. в разделе Проектирование управления мультимоделями (панель инструментов системы управления).
Совет
Модель Simulink можно непосредственно линеаризовать с помощью программного обеспечения Simulink Control Design.
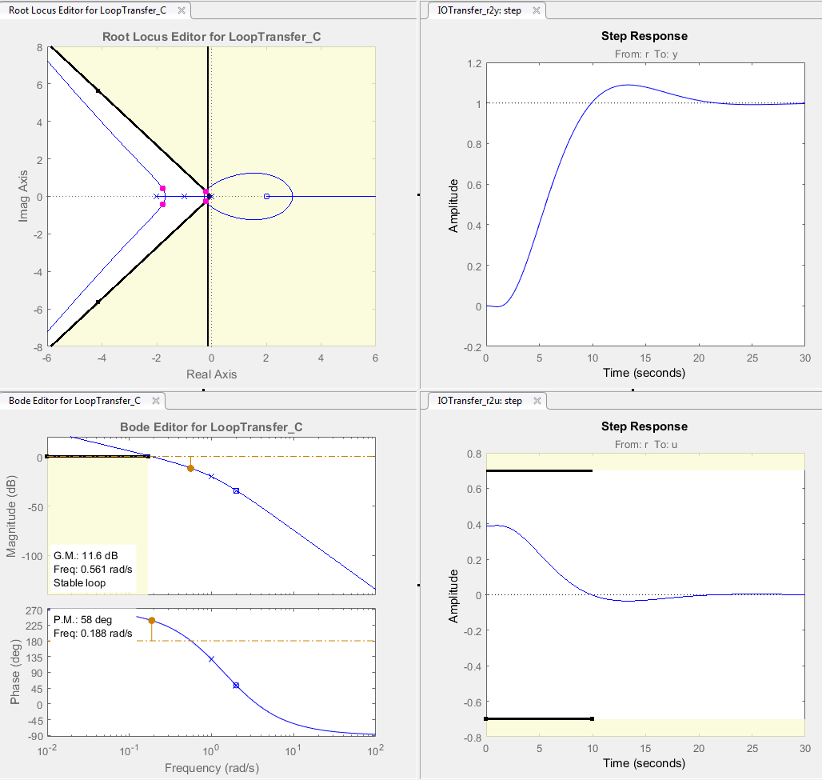
В этом примере используется диаграмма корневого локуса для разработки отклика функции передачи с разомкнутым контуром, open_loopTF. Чтобы создать сеанс приложения Control System Designer с графиком корневого локуса для функции передачи с разомкнутым контуром, используйте следующую команду:
controlSystemDesigner('rlocus',open_loopTF)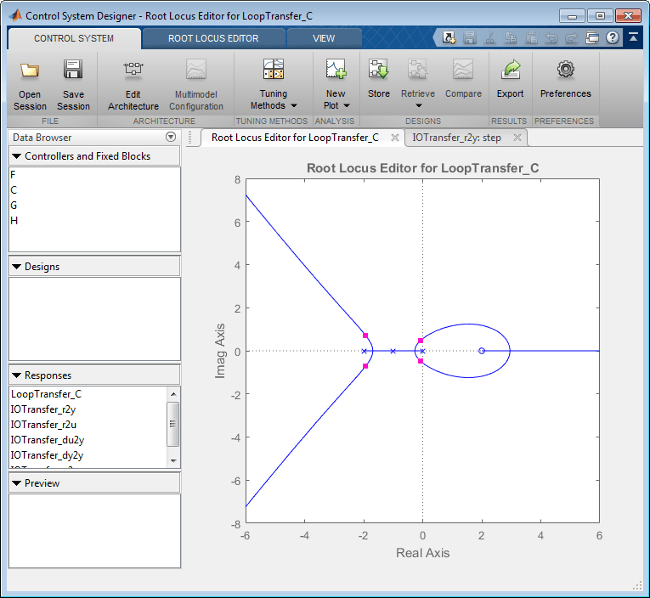
Откроется приложение Control System Designer и откроется редактор корневых локусов. Приложение позволяет создавать контроллеры для систем с одним входом и одним выходом (SISO) в MATLAB ® и Simulink. Дополнительные сведения см. в разделе Классическое проектирование системы управления (панель инструментов системы управления).
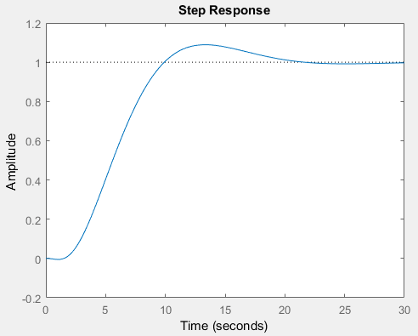
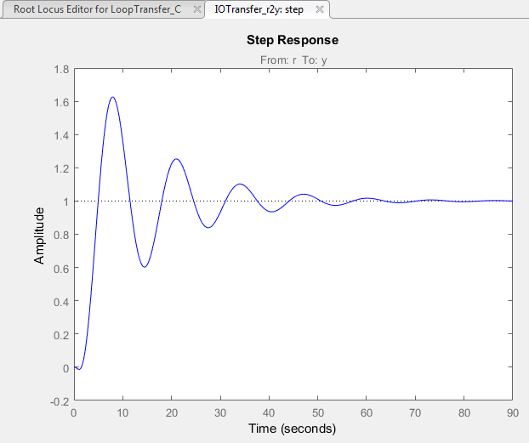
Приложение также отображает график ответа на шаг системы. На графике показана реакция системы с замкнутым контуром от r (вход в предварительный фильтр, F) в y (выход модели установки, G).
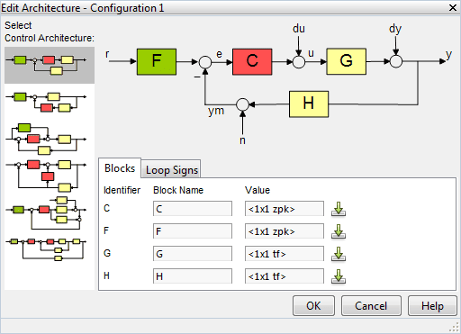
Чтобы выбрать архитектуру проектируемой системы управления, в приложении щелкните Изменить архитектуру. В этом примере используется архитектура по умолчанию. В этой системе модель завода G является функцией переноса с разомкнутым контуром. open_loopTF. Предварительный фильтр, F, и датчик, H, установлены в 1и компенсатор, C, является компенсатором, который разработан с использованием методов оптимизации отклика.
Существует несколько возможных методов проектирования системы SISO; в этом примере используется автоматизированный подход, использующий методы оптимизации отклика.
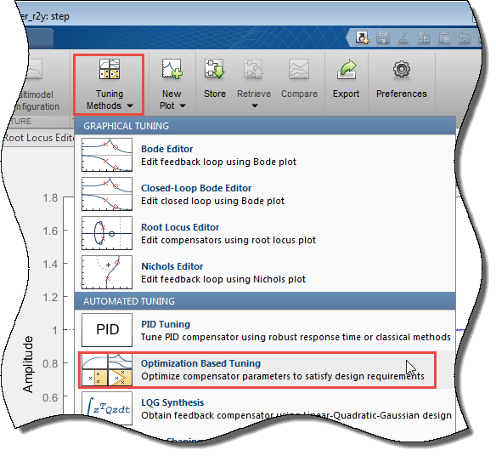
Чтобы создать задачу оптимизации отклика, в выпадающем списке Методы настройки выберите Optimization Based Tuning.
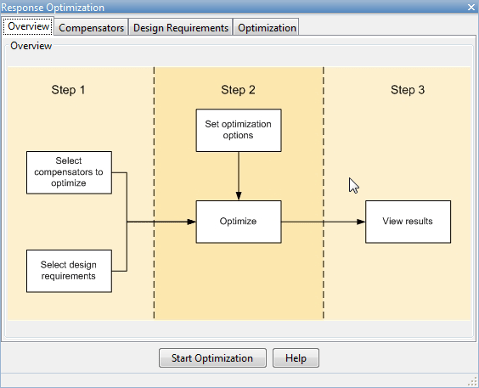
Окно Оптимизация ответа имеет четыре вкладки. За исключением первой вкладки, каждая вкладка соответствует шагу в процессе оптимизации ответа:
Обзор - Принципиальная схема процесса оптимизации ответа.
Компенсаторы - выберите и настройте элементы компенсатора, которые требуется настроить. См. раздел Выбор перестраиваемых элементов компенсатора.
Требования к конструкции - выберите требования к конструкции, которым система должна соответствовать после настройки элементов компенсатора. См. раздел Добавление требований к конструкции.
Оптимизация - настройка параметров оптимизации и просмотр хода оптимизации ответа. См. раздел Оптимизация ответа системы.
Примечание
При оптимизации ответов в приложении нельзя добавлять неопределенность в параметры или элементы компенсатора.
Можно настроить элементы или параметры компенсатора в системе в соответствии с заданными проектными требованиями.
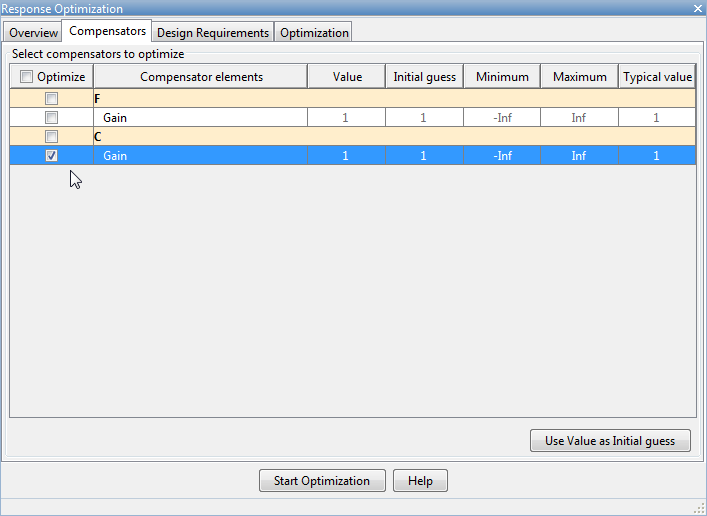
Для задания настраиваемых элементов компенсатора:
В окне Оптимизация ответа выберите вкладку Компенсаторы.
На вкладке Компенсаторы установите флажки в столбце Оптимизировать, соответствующие настраиваемым элементам компенсатора.
В этом примере выберите Gain в компенсаторе C.
Для настройки параметров в системе управления можно использовать требования к проектированию в частотной и временной областях.
В этом примере используются спецификации конструкции, описанные в разделе «Требования к конструкции». Создайте проектные требования, соответствующие следующим спецификациям:
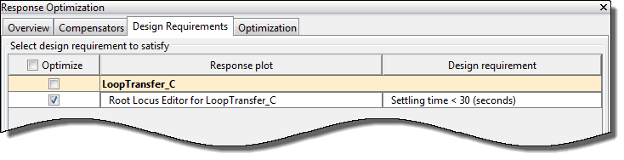
После добавления требований к конструкции можно выбрать подмножество требований к конструкции контроллера, как описано в разделе Выбор требований к конструкции для использования при оптимизации отклика. На вкладке Требования к конструкции (Design requirements) окна Оптимизация отклика (Response Optimization) можно создать требования к конструкции и выбрать требования, которые необходимо использовать для оптимизации.
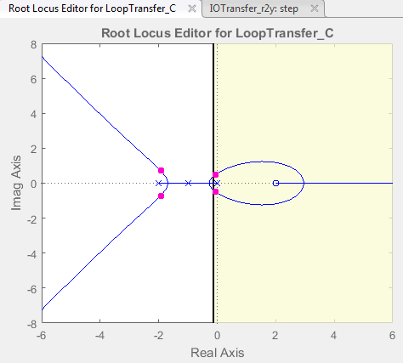
Первое требование к конструкции состоит в том, чтобы время отстаивания составляло 30 секунд или менее. Эта спецификация может быть представлена на схеме корневого локуса как ограничение для реальных частей полюсов системы с разомкнутым контуром.
Для добавления требований к расчету времени установки:
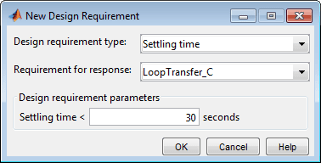
На вкладке Требования к конструкции (Design requirements) щелкните Добавить новое требование к конструкции (Add new design requirement). Откроется диалоговое окно Новое конструкторское требование (New Design Requirement).
В этом диалоговом окне можно задать новые проектные требования и добавить их на новый или существующий график.
Добавьте требование к конструкции к существующей схеме корневого локуса.
В раскрывающемся списке Тип требования к конструкции выберите Settling time.
В раскрывающемся списке Requirement for response выберите LoopTransfer_C.
Укажите время настройки как 30 секунд.
Нажмите кнопку ОК.
Требования к расчету времени проектирования перечислены на вкладке Требования к проектированию окна Оптимизация ответа.
В приложении требование к дизайну отображается на графике корневого локуса как вертикальная линия.
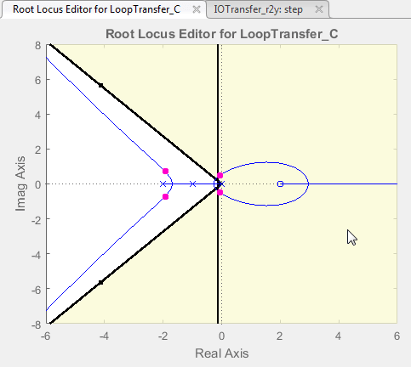
Второе требование проекта состоит в том, чтобы процентное превышение составляло 10% или менее. Это требование связано с коэффициентом демпфирования на диаграмме корневого локуса. Помимо добавления конструкторского требования с помощью кнопки Добавить новое конструкторское требование (Add new design requirement), можно также щелкнуть правой кнопкой мыши непосредственно на графиках, чтобы добавить требование.
Чтобы добавить это требование к конструкции, выполните следующие действия.
В приложении Control System Designer щелкните правой кнопкой мыши в пределах пробела диаграммы корневого локуса. Выберите «Требования к конструкции» > «Создать», чтобы открыть диалоговое окно «Новое требование к конструкции».
В раскрывающемся списке Тип требования к конструкции выберите Percent overshoot.
Укажите процент превышения как 10.
Нажмите кнопку ОК.
В приложении требование к дизайну отображается на графике корневого локуса как две линии, излучаемые под углом от начала координат.
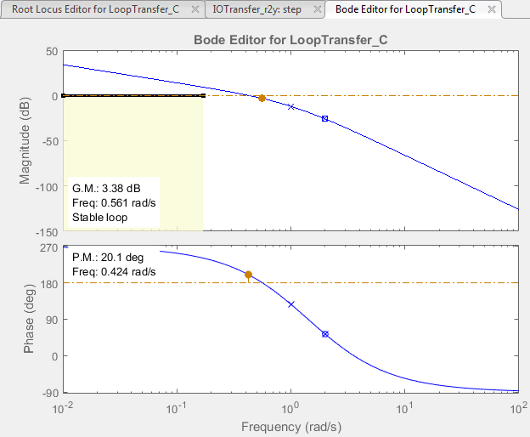
Третье требование к конструкции состоит в том, чтобы время подъема составляло 10 секунд или менее. Это требование соответствует нижнему пределу на диаграмме величины Бода.
Чтобы добавить это требование к конструкции, выполните следующие действия.
В приложении в раскрывающемся списке Методы настройки выберите Bode Editor.
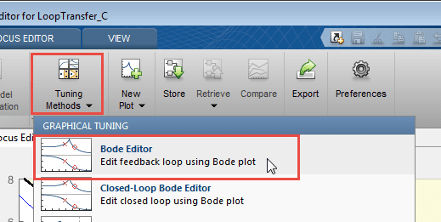
В диалоговом окне «Выбор ответа для редактирования» задайте значение «Выбрать ответ для редактирования». LoopTransfer_Cи нажмите кнопку «Печать».
График Bode отображается в редакторе Bode Editor.
Для открытия диалогового окна «Новое проектное требование» щелкните правой кнопкой мыши в пределах пробела на графике с разомкнутым контуром и выберите «Проектные требования» > «Создать».
Укажите проектное требование для представления времени подъема и добавьте его к новому графику Bode.
В раскрывающемся списке Тип требования к конструкции выберите Lower gain limit.
Укажите диапазон частот как 1e-2 кому 0.17.
Задайте диапазон величин как 0 кому 0.
Нажмите кнопку ОК.
Проектное требование отображается на графике в виде горизонтальной линии.
Четвертое требование к конструкции заключается в ограничении сигнала привода в пределах ± 0,7.
Чтобы добавить это требование к конструкции, выполните следующие действия.
В окне Оптимизация ответа (Response Optimization) в окне Требования к конструкции (Design requirements) щелкните Добавить новое требование к конструкции (Add new design Откроется диалоговое окно Новое конструкторское требование (New Design Requirement).
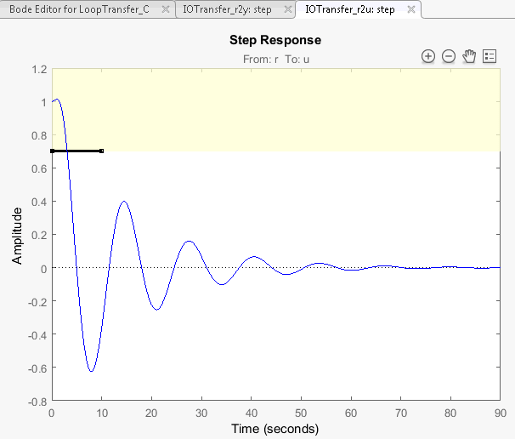
Создайте проектное требование во временной области для представления верхнего предела сигнала привода и добавьте его к новому графику ответа на шаг:
В раскрывающемся списке Тип требования к конструкции выберите Step response upper amplitude limit.
В раскрывающемся списке Requirement for response выберите IOTransfer_r2u.
Укажите временной диапазон как 0 кому 10.
Задайте диапазон амплитуд как 0.7 кому 0.7.
Нажмите кнопку OK. График ответа второго шага для ответа с замкнутым контуром из r кому u формируется в приложении. График содержит горизонтальную линию, представляющую верхний предел сигнала исполнительного механизма.
Чтобы продлить этот предел для всех времен (до t = ∞), щелкните правой кнопкой мыши в желтой затененной области и выберите «Удлинить до inf».
Добавить соответствующее проектное требование для нижнего предела сигнала привода:
В окне Оптимизация ответа (Response Optimization) в окне Требования к конструкции (Design requirements) щелкните Добавить новое требование к конструкции (Add new design Откроется диалоговое окно Новое конструкторское требование (New Design Requirement).
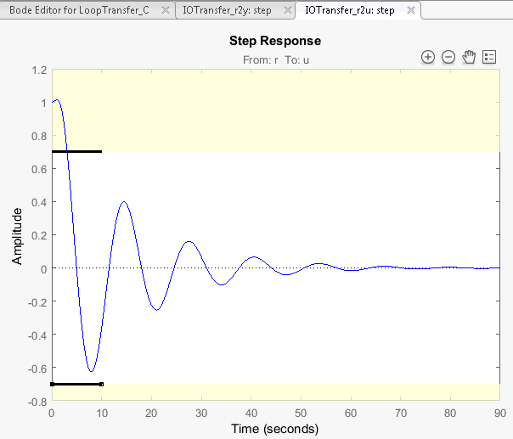
Создайте проектное требование во временной области для представления нижнего предела сигнала привода и добавьте его к графику ответа на шаг:
В раскрывающемся списке Тип требования к конструкции выберите Step response lower amplitude limit.
В раскрывающемся списке Requirement for response выберите IOTransfer_r2u.
Укажите временной диапазон как 0 кому 10.
Задайте диапазон амплитуд как -0.7 кому -0.7.
Нажмите кнопку OK. График ответа шага теперь содержит вторую горизонтальную линию, представляющую нижний предел сигнала исполнительного механизма.
Чтобы продлить этот предел для всех времен (до t = ∞), щелкните правой кнопкой мыши в желтой затененной области требования к конструкции и выберите «Удлинить до inf».
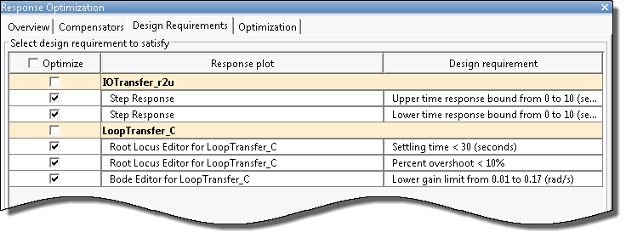
В таблице на вкладке Требования к конструкции (Design requirements) перечислены все указанные требования к конструкции. Выберите требования к конструкции, которые необходимо использовать при оптимизации отклика. В этом примере используются все текущие требования к конструкции.
После выбора элементов компенсатора для настройки и добавления требований к конструкции можно оптимизировать отклик системы.
Чтобы оптимизировать отклик системы, на вкладке Оптимизация (Optimization) окна Оптимизация отклика (Response Optimization) щелкните Начать оптимизацию (Start Optimization).
На вкладке Оптимизация (Optimization) отображается ход оптимизации.
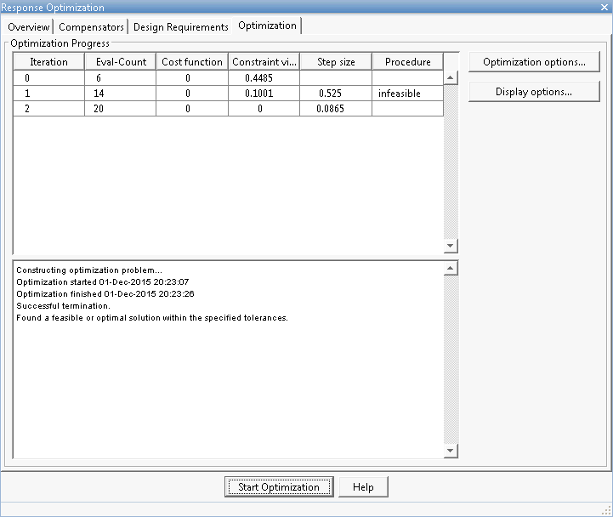
Сообщение о состоянии указывает, что решатель оптимизации нашел решение, удовлетворяющее требованиям конструкции в пределах допусков. Убедитесь, что проектные требования выполнены.
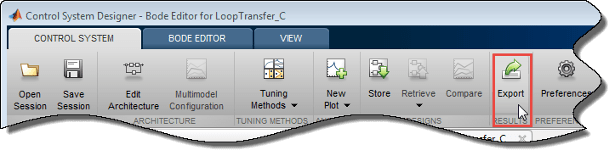
После проектирования компенсатора его можно экспортировать в рабочую область MATLAB и создать модель полной системы замкнутого цикла. Для экспорта настроенного компенсатора:
В приложении выберите Экспорт.
В диалоговом окне Экспорт модели (Export Model) выберите С (C) - созданный компенсатор и нажмите кнопку Экспорт (Export).
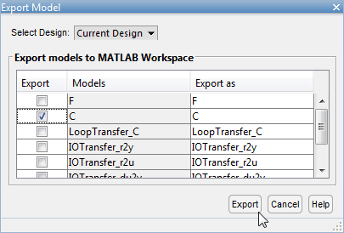
В командной строке введите следующую команду для создания системы с замкнутым контуром, CL, из функции передачи с разомкнутым контуром, open_loopTFи компенсатор, C:
CL = feedback(C*open_loopTF,1)
Возвращается следующая модель:
CL =
-0.19414 (s-2)
----------------------------------------------
(s^2 + 0.409s + 0.1136) (s^2 + 3.591s + 3.418)
Continuous-time zero/pole/gain model.Для создания графика ответа на шаг системы с замкнутым контуром введите следующую команду.
step(CL);