Добавить дорогу к сценарию вождения или группе дорог
road( добавляет дорогу к сценарию вождения, scenario,roadcenters)scenario. Форма дороги и ориентация дороги в плоскости 2-D определяются с помощью набора центров дорог. roadcenters, в дискретных точках. При указании количества полос на дороге полосы нумеруются относительно центров дорог. Дополнительные сведения см. в разделе Направление дороги и нумерация полос движения.
road( добавляет дорогу указанной ширины, scenario,roadcenters,roadwidth)roadwidth.
road( добавляет дорогу с заданной шириной и углом поворота, scenario,roadcenters,roadwidth,bankingangle)bankingangle.
road( добавляет дорогу с указанными полосами движения, scenario,roadcenters,'Lanes',lspec)lspec.
road( добавляет дорогу с указанным банковским углом и полосами движения.scenario,roadcenters,bankingangle,'Lanes',lspec)
road(___,'Name', задает имя дороги, используя любую из комбинаций входных аргументов из предыдущих синтаксисов.name)
rd = road(___)Road объект, в котором хранятся свойства созданной дороги.
road( добавление сегмента дороги в группу дорог, rg,roadcenters)rg. Группа дорог используется для создания развязки или перекрестка дороги. Форма и ориентация сегмента дороги в плоскости 2-D определяются с помощью набора центров дорог. roadcenters, в дискретных точках. При указании количества полос на сегменте дороги полосы нумеруются относительно центров дорог. Дополнительные сведения см. в разделе Направление дороги и нумерация полос движения.
road( добавляет сегмент дороги указанной ширины, rg,roadcenters,roadwidth)roadwidth, в дорожную группу.
road( добавляет сегмент дороги с заданной шириной и углом поворота, rg,roadcenters,roadwidth,bankingangle)bankingangle, в дорожную группу.
road( добавление сегмента дороги с указанными полосами; rg,roadcenters,'Lanes',lspec)lspec, в дорожную группу.
road( добавляет сегмент дороги с указанным банковским углом и полосами в группу дорог.rg,roadcenters,bankingangle,'Lanes',lspec)
Создайте сценарий вождения, содержащий кривую дорогу, две прямые дороги и двух актеров: автомобиль и велосипед. Оба актёра двигаются по дороге в течение 60 секунд.
Создайте управляющий объект сценария.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Создайте криволинейную дорогу, используя точки центра дороги, следующие за дугой окружности с 800-метровым радиусом. Дуга начинается с 0 °, заканчивается с 90 ° и отбирается с шагом 5 °.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
Добавьте две прямые дороги с шириной по умолчанию, используя точки центра дороги на каждом конце.
roadcenters = [700 0 0; 100 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 2
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 3
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
Достань границы дороги.
rbdry = roadBoundaries(scenario);
Добавьте в сценарий автомобиль и велосипед. Расположите автомобиль в начале первой прямой дороги.
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
Расположите велосипед дальше по дороге.
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
Постройте график сценария.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');

Отображение поз и профилей актера.
poses = actorPoses(scenario)
poses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Создайте сценарий движения, содержащий фигуру 8, указанную в мировых координатах сценария. Преобразование мировых координат сценария в систему координат эго-транспортного средства.
Создайте пустой сценарий управления.
scenario = drivingScenario;
Добавьте фигуру-8 к сценарию. Просмотрите сценарий.
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)
Добавьте ego-транспортное средство к сценарию. Расположите транспортное средство в точке с мировыми координатами (20, -20) и сориентируйте его под углом рыскания -15 градусов.
ego = actor(scenario,'ClassID',1,'Position',[20 -20 0],'Yaw',-15);

Получение границ дорог в координатах эго-транспортного средства с помощью roadBoundaries функция. Укажите средство ego в качестве входного аргумента.
rbEgo1 = roadBoundaries(ego);
Отображение результата на графике птичьего глаза.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)

Получение границ дорог в мировых координатах с помощью roadBoundaries функция. Укажите сценарий в качестве входного аргумента.
rbScenario = roadBoundaries(scenario);
Получение границ дорог в координатах эго-транспортного средства с помощью driving.scenario.roadBoundariesToEgo функция.
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
Отображение границ дороги на графике птичьего полета.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})

Создайте сценарий движения, содержащий автомобиль и пешехода на прямой дороге. Затем создайте и отобразите разметку полосы движения дороги на графике птичьего полета.
Создайте пустой сценарий управления.
scenario = drivingScenario;
Создайте прямой 25-метровый сегмент дороги с двумя полосами движения в одном направлении.
lm = [laneMarking('Solid') laneMarking('Dashed','Length',2,'Space',4) laneMarking('Solid')]; l = lanespec(2,'Marking',lm); road(scenario,[0 0 0; 25 0 0],'Lanes',l);
Добавить к сценарию вождения пешехода, переходящего дорогу со скоростью 1 метр в секунду, и автомобиля, идущего по дороге со скоростью 10 метров в секунду.
ped = actor(scenario,'ClassID',4,'Length',0.2,'Width',0.4,'Height',1.7); car = vehicle(scenario,'ClassID',1); smoothTrajectory(ped,[15 -3 0; 15 3 0],1); smoothTrajectory(car,[car.RearOverhang 0 0; 25-car.Length+car.RearOverhang 0 0],10);
Просмотрите сценарий и соответствующий график погони.
plot(scenario)

chasePlot(car)

Запустите моделирование.
Создайте график птичьего глаза.
Создайте плоттер контура, плоттер границ полосы движения и плоттер разметки полосы движения для графика «птичий глаз».
Получение границ дорог и целевых контуров.
Получение вершин и граней разметки полосы движения.
Отображение границ полосы движения и маркеров полосы движения.
Запустите цикл моделирования.
bep = birdsEyePlot('XLim',[-25 25],'YLim',[-10 10]); olPlotter = outlinePlotter(bep); lbPlotter = laneBoundaryPlotter(bep); lmPlotter = laneMarkingPlotter(bep,'DisplayName','Lanes'); legend('off'); while advance(scenario) rb = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); [lmv,lmf] = laneMarkingVertices(car); plotLaneBoundary(lbPlotter,rb); plotLaneMarking(lmPlotter,lmv,lmf); plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color); end



Трёхсторонний перекрёсток - это Y-перекрёсток, в котором две смежные дороги пересекают третью дорогу под тупым углом, как показано на этом рисунке. Для соединения трех дорог необходимо создать Y-развязку путем добавления трех сегментов дороги.

Добавить три дороги к сценарию вождения
Создайте пустой сценарий управления.
scenario = drivingScenario;
Укажите количество полос и ширину каждой полосы на дорогах.
ls = lanespec(2,'Width',5);Определите центры дорог для трех дорог и добавьте их в сценарий вождения. Первая дорога диагонально ориентирована влево от сценарного полотна, вторая дорога диагонально ориентирована вправо от сценарного полотна, а третья дорога ориентирована вертикально.
% Add the first road roadCenters = [-20 0; 6 0]; road(scenario,roadCenters,'Name','Road 1','Lanes',ls); % Add the second road roadCenters = [23 7; 50 33]; road(scenario,roadCenters,'Name','Road 2','Lanes',ls); % Add the third road roadCenters = [23 -7; 50 -33]; road(scenario,roadCenters,'Name','Road 3','Lanes',ls);
Постройте график сценария.
figure plot(scenario)

Создание Y-образной развязки для соединения дорог
Создать RoadGroup объект. Задайте ширину для каждого сегмента дороги, образующего Y-образное соединение.
rg = driving.scenario.RoadGroup('Name','Y-Junction'); roadWidth = 10;
Укажите центры дорог для трех сегментов дороги и добавьте эти сегменты дороги в RoadGroup с помощью road функция. Эти сегменты дороги пересекаются друг с другом.
% Add the first road segment roadCenters = [23 7; 14 1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 1'); % Add the second road segment roadCenters = [23 -7; 14 -1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 2'); % Add the third road segment roadCenters = [23 7; 21 4; 21 -4; 23 -7]; road(rg,roadCenters,roadWidth,'Name','Segment 3');
Добавить Y-образное соединение в сценарий управления
Добавление сегментов дороги, хранящихся в RoadGroup объект к управляющему сценарию с помощью roadGroup функция. Сегменты дороги образуют Y-образную развязку, которая соединяет три дороги в сценарии вождения.
roadGroup(scenario,rg);

Создание дороги с помощью road укажите центры дорог в качестве ввода матрицы. Функция создает направленную линию, пересекающую центры дорог, начиная от координат в первой строке матрицы и заканчивая координатами в последней строке матрицы. Координаты в первых двух строках матрицы определяют направление прорисовки дороги. Эти координаты соответствуют первым двум последовательным дорожным центрам. Направление рисования - это направление, в котором дороги визуализируются на графике сценария.
Чтобы создать дорогу с помощью приложения «Конструктор сценариев вождения», можно либо указать параметр «Центры дорог», либо в интерактивном режиме нарисовать на холсте сценария. Подробный пример см. в разделе Создание сценария управления. В этом случае направление прорисовки - это направление, в котором тонируются дороги в холсте «Сценарий».
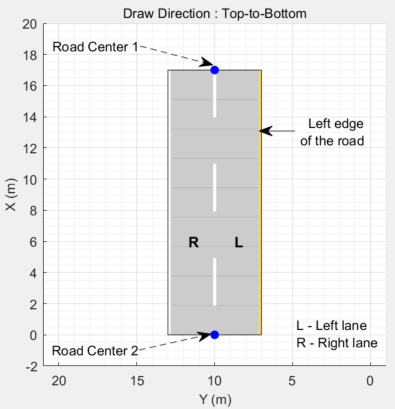
Для дороги с направлением прорисовки сверху вниз разница между координатами X первых двух последовательных центров дороги является положительной.
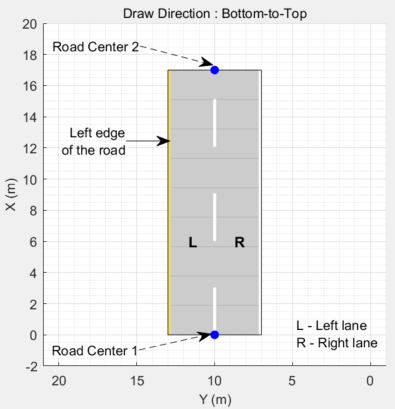
Для дороги с направлением прорисовки снизу вверх разница между координатами X первых двух последовательных центров дороги отрицательна.
|
|
|
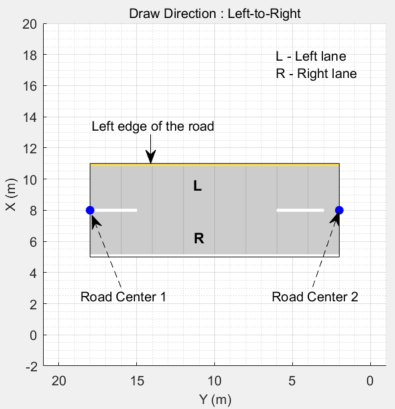
Для дороги с направлением прорисовки слева направо разница между координатами y первых двух последовательных центров дороги является положительной.
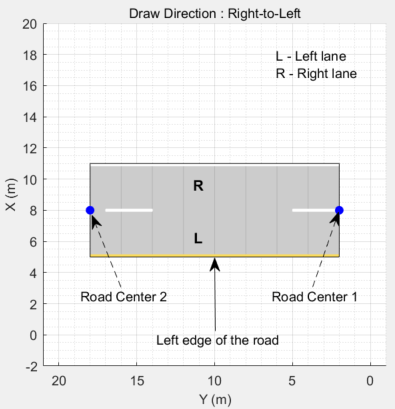
Для дороги с направлением прорисовки справа налево разница между координатами y первых двух последовательных центров дороги отрицательна.
|
|
|
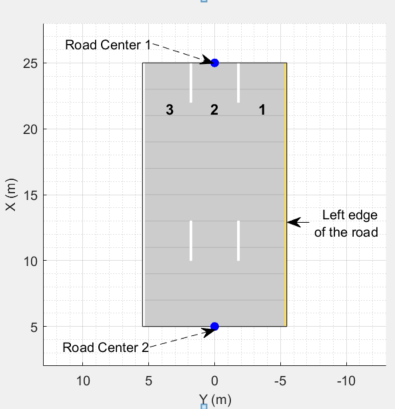
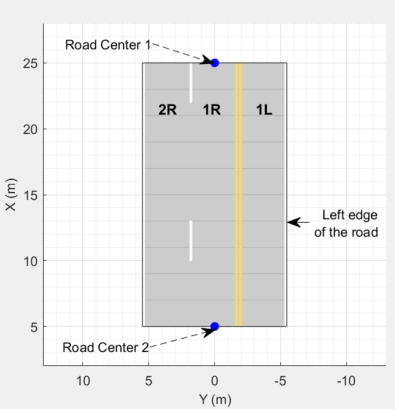
Полосы движения должны нумероваться слева направо, при этом левый край дороги определяется относительно направления прорисовки дороги. Для дороги с односторонним движением по умолчанию левый край дороги представляет собой сплошную желтую разметку, которая указывает конец дороги в поперечном направлении (направлении, перпендикулярном направлению рисования). Для дороги с двусторонним движением по умолчанию обе кромки отмечены сплошными белыми линиями.
Например, на этих диаграммах показано, как полосы пронумерованы на дороге с односторонним и двусторонним движением с направлением вытягивания сверху вниз.
| Нумерация полос в дороге с односторонним движением | Нумерация полос движения в двухсторонней дороге |
Укажите количество полос движения как положительное целое число для дороги с односторонним движением. Если целочисленное значение задано как 1, 2, 3 обозначают первую, вторую и третью полосы дороги соответственно.
| Укажите количество полос движения в виде двухэлементного вектора положительного целого числа для дороги с двусторонним движением. Если установить вектор как [ 1L обозначают единственную левую полосу дороги. 1R и 2R обозначают первую и вторую правую полосы дороги соответственно.
|
Спецификации полос применяются в порядке нумерации полос.
road функция создает дорогу для актера, которому необходимо следовать в сценарии вождения. Дорога задается с помощью N двумерных или трехмерных ППМ. Каждый из N-1 сегментов между ППМ определяет кривую, кривизна которой изменяется линейно с расстоянием вдоль сегмента. Функция соответствует кусочно-клотоидной кривой координатам (x, y) ППМ путем сопоставления кривизны с обеих сторон ППМ. Для незамкнутой кривой кривизна в первой и последней ППМ равна нулю. Если первая и последняя ППМ совпадают, кривизны до и после конечных точек совпадают. Координаты Z дороги интерполируются с использованием сохраняющей форму кусочно-кубической кривой.