Создание объектов обнаружения на основе радиолокационных измерений
Генератор радиолокационного обнаружения не рекомендуется использовать, если не требуется генерация кода C/C + +. Вместо этого используйте генератор данных ведущего радара. Дополнительные сведения см. в разделе Вопросы совместимости.
Автоматизированная панель инструментов вождения/сценарий вождения и моделирование датчиков
Блок генератора радиолокационного обнаружения генерирует сигналы обнаружения на основе радиолокационных измерений, производимых радиолокационным датчиком, установленным на эго-транспортном средстве. Детекции получаются из моделируемых позиций актера и формируются с интервалами, равными интервалу обновления датчика. По умолчанию обнаружения привязываются к системе координат эго-транспортного средства. Генератор может моделировать реальные обнаружения с добавлением случайного шума, а также генерировать ложные аварийные обнаружения. Статистическая модель генерирует шум измерения, истинные обнаружения и ложные срабатывания. Случайные числа, генерируемые статистической моделью, управляются настройками генератора случайных чисел на вкладке Измерения (Measurements). Генератор радиолокационного обнаружения можно использовать для создания входных данных блока многообъектного трекера. При построении сценариев и моделей датчиков с помощью приложения Driving Script Designer радиолокационные датчики, экспортируемые в Simulink ®, выводятся как блоки генератора радиолокационного обнаружения.
Actors - Сценарные позы актераОператор сценария позирует в координатах эго-транспортного средства, указанных как шина Simulink, содержащая структуру MATLAB.
Структура должна содержать эти поля.
| Область | Описание | Напечатать |
|---|---|---|
NumActors | Число действующих лиц | Неотрицательное целое число |
Time | Текущее время моделирования | Скаляр с действительным значением |
Actors | Актер позирует | NumActors-длинный массив структур позы актера |
Каждый актер позирует структуру в Actors должны содержать эти поля.
| Область | Описание |
|---|---|
ActorID | Определяемый сценарием идентификатор субъекта, указанный как положительное целое число. |
Position | Положение актера, определяемое как действительный вектор вида [x y z]. Единицы в метрах. |
Velocity | Скорость (v) актера в направлениях x-y и z, заданная как действительный вектор вида [vx vy vz]. Единицы измерения в метрах в секунду. |
Roll | Угол крена актера, заданный как действительный скаляр. Единицы измерения в градусах. |
Pitch | Угол тангажа актера, определяемый как действительный скаляр. Единицы измерения в градусах. |
Yaw | Угол рыскания актера, определяемый как действительный скаляр. Единицы измерения в градусах. |
AngularVelocity | Угловая скорость (λ) актера в направлениях x -, y - и z, заданная как действительный вектор вида [startx starty ü z]. Единицы измерения в градусах в секунду. |
Detections - ОбнаруженияОбнаружение объектов, возвращаемое как шина Simulink, содержащая структуру MATLAB. Дополнительные сведения о шинах см. в разделе Создание невиртуальных шин (Simulink).
Можно передавать обнаруженные объекты от этих датчиков и других датчиков в трекер, например, блок многообъектного трекера, и создавать дорожки.
| Область | Описание | Напечатать |
|---|---|---|
NumDetections | Количество обнаружений | целое число |
IsValidTime | False при запросе обновлений между интервалами вызова блоков | Булев |
Detections | Обнаружения объектов | Массив структур обнаружения объектов длиной, заданной параметром Максимальное число обнаружений, о которых сообщается. Только NumDetections из них фактические обнаружения. |
Каждая структура обнаружения объектов содержит эти свойства.
| Собственность | Определение |
|---|---|
Time | Время измерения |
Measurement | Измерения объектов |
MeasurementNoise | Ковариационная матрица шума измерения |
SensorIndex | Уникальный идентификатор датчика |
ObjectClassID | Классификация объектов |
ObjectAttributes | Дополнительная информация передана трекеру |
MeasurementParameters | Параметры, используемые функциями инициализации нелинейных фильтров слежения Калмана |
Для декартовых координат: Measurement и MeasurementNoise отображаются в системе координат, заданной параметром Система координат (Coordinate system), используемым для отчета об обнаружениях.
Для сферических координат Measurement и MeasurementNoise представлены в сферической системе координат на основе декартовой системы координат датчика.
Измерительный и измерительный шум
| Система координат, используемая для сообщения об обнаружениях | Координаты измерения и шума | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Ego Cartesian' |
Зависимость координат от измерения скорости диапазона Enable
| |||||||||||||||
'Sensor Cartesian' | ||||||||||||||||
'Sensor spherical' |
Зависимость координат от «Включить измерения угла возвышения» и «Включить измерения скорости диапазона»
|
MeasurementParameters
| Параметр | Определение |
|---|---|
Frame | Перечисляемый тип, указывающий кадр, используемый для отчета об измерениях. Когда Frame имеет значение 'rectangular'обнаружения сообщаются в декартовых координатах. Когда Frame установлено 'spherical'обнаружения сообщаются в сферических координатах. |
OriginPosition | 3-D смещение вектора начала координат датчика от начала координат эго-транспортного средства. Вектор получен из SensorLocation и Height свойства, указанные в radarDetectionGenerator. |
Orientation | Ориентация системы координат радиолокационного датчика относительно системы координат эго-транспортного средства. Ориентация определяется на основе Yaw, Pitch, и Roll свойства radarDetectionGenerator. |
HasVelocity | Указывает, содержат ли измерения компоненты скорости или скорости диапазона. |
HasElevation | Указывает, содержат ли измерения компоненты отметки. |
ObjectAttributes свойство каждого обнаружения представляет собой структуру с этими полями.
| Область | Определение |
|---|---|
TargetIndex | Идентификатор актера, ActorID, что сгенерировало обнаружение. Для ложных аварийных сигналов это значение является отрицательным. |
SNR | Отношение сигнал/шум обнаружения. Единицы измерения находятся в дБ. |
Unique identifier of sensor - Уникальный идентификатор датчикаУникальный идентификатор датчика, указанный как положительное целое число. Идентификатор датчика различает обнаруженные сигналы, поступающие от различных датчиков в мультисенсорной системе. Если модель содержит несколько блоков датчиков с одним и тем же идентификатором, в области «Птичий глаз» отображается ошибка.
Пример: 5
Required interval between sensor updates (s) - Требуемый интервал времени0.1 (по умолчанию) | положительный вещественный скалярТребуемый интервал времени между обновлениями датчика, указанный как положительный действительный скаляр. Значение этого параметра должно быть целым числом, кратным интервалу данных входного порта Actors. Обновления, запрошенные от датчика между интервалами обновления, не содержат обнаружений. Единицы измерения в секундах.
Sensor's (x,y) position (m) - Расположение центра радиолокационных датчиков[3.4 0] (по умолчанию) | действительный вектор 1 на 2Местоположение центра радиолокационных датчиков, определяемое как действительный вектор 1 на 2. Параметры положения (m) датчика (x, y) и высоты (m) датчика определяют координаты радиолокационного датчика относительно системы координат эго-транспортного средства. Значением по умолчанию соответствует радар, установленный в центре передней решетки седана. Единицы в метрах.
Sensor's height (m) - Высота датчика РЛС над плоскостью земли0.2 (по умолчанию) | положительный вещественный скалярВысота радиолокационного датчика над плоскостью земли, заданная как положительный действительный скаляр. Высота определяется относительно наземной плоскости транспортного средства. Параметры положения (m) датчика (x, y) и высоты (m) датчика определяют координаты радиолокационного датчика относительно системы координат эго-транспортного средства. Значением по умолчанию соответствует радар, установленный в центре передней решетки седана. Единицы в метрах.
Пример: 0.25
Yaw angle of sensor mounted on ego vehicle (deg) - Угол рыскания датчика0 (по умолчанию) | вещественный скалярУгол рыскания радиолокационного датчика, определяемый как реальный скаляр. Угол рыскания - это угол между центральной линией эго-транспортного средства и нисходящей осью радиолокационного датчика. Положительный угол рыскания соответствует повороту по часовой стрелке при взгляде в положительном направлении оси z системы координат эго-транспортного средства. Единицы измерения в градусах.
Пример: -4.0
Pitch angle of sensor mounted on ego vehicle (deg) - Угол тангажа датчика0 (по умолчанию) | вещественный скалярУгол тангажа датчика, заданный как действительный скаляр. Угол тангажа - это угол между нисходящей осью радиолокационного датчика и плоскостью x-y системы координат эго-транспортного средства. Положительный угол наклона соответствует повороту по часовой стрелке при взгляде в положительном направлении оси y системы координат эго-транспортного средства. Единицы измерения в градусах.
Пример: 3.0
Roll angle of sensor mounted on ego vehicle (deg) - Угол крена датчика0 (по умолчанию) | вещественный скалярУгол крена радиолокационного датчика, определяемый как реальный скаляр. Угол крена - это угол поворота нисходящей оси радара вокруг оси х системы координат эго-транспортного средства. Положительный угол крена соответствует повороту по часовой стрелке при взгляде в положительном направлении оси X системы координат. Единицы измерения в градусах.
Source of output bus name - Наименование источника выходной шиныAuto (по умолчанию) | PropertyИсточник имени выходной шины, указанный как Auto или Property. При выборе Auto, блок автоматически создаст имя шины. При выборе Propertyукажите имя шины с помощью параметра Specify an output bus name.
Пример: Property
Specify an output bus name - Наименование выходной шиныИмя выходной шины.
Чтобы включить этот параметр, установите для параметра Source of output bus name значение Property.
Maximum number of reported detections - Максимальное количество зарегистрированных обнаружений50 (по умолчанию) | положительное целое числоМаксимальное число обнаружений, указанное датчиком как положительное целое число. Сообщения об обнаружениях поступают в порядке увеличения расстояния от датчика до достижения максимального числа.
Пример: 100
Coordinate system used to report detections - Система координат сообщаемых обнаруженийEgo Cartesian (по умолчанию) | Sensor Cartesian | Sensor SphericalСистема координат сообщаемых обнаружений, заданная как одно из следующих значений:
Ego Cartesian - Обнаружение регистрируется в декартовой системе координат эго-транспортного средства.
Sensor Cartesian- Обнаружение сообщается в декартовой системе координат датчика.
Sensor spherical - Обнаружение регистрируется в сферической системе координат. Эта система координат центрирована на радаре и совмещена с ориентацией радара на эго-транспортном средстве.
Simulate using - Тип выполняемого моделированияInterpreted execution (по умолчанию) | Code generationInterpreted execution - Моделирование модели с помощью интерпретатора MATLAB. Этот параметр сокращает время запуска. В Interpreted execution можно отладить исходный код блока.
Code generation - Моделирование модели с использованием сгенерированного кода C/C + +. При первом запуске моделирования Simulink генерирует код C/C + + для блока. Код C используется повторно для последующего моделирования до тех пор, пока модель не изменится. Для этого параметра требуется дополнительное время запуска.
Azimuthal resolution of radar (deg) - Азимутальное разрешение РЛС4.0 (по умолчанию) | положительный вещественный скалярАзимутальное разрешение РЛС, определяемое как положительный действительный скаляр. Разрешение азимута определяет минимальное разделение по азимутальному углу, при котором РЛС может различать две цели. Разрешение по азимуту обычно является 3dB-downpoint ширины луча угла азимута радара. Единицы измерения в градусах.
Пример: 6.5
Elevation resolution of radar (deg) - Разрешение РЛС по высоте10.0 (по умолчанию) | положительный вещественный скалярРазрешающая способность РЛС по высоте, заданная как положительный реальный скаляр. Разрешение возвышения определяет минимальное разделение по углу возвышения, при котором РЛС может различать две цели. Разрешение возвышения обычно представляет собой 3dB-downpoint по ширине луча угла возвышения радара. Единицы измерения в градусах.
Пример: 3.5
Для включения этого параметра установите флажок «Включить измерения угла возвышения».
Range resolution of radar (m) - Разрешающая способность РЛС по дальности2.5 (по умолчанию) | положительный вещественный скалярРазрешение дальности РЛС, определяемое как положительный действительный скаляр. Разрешение дальности определяет минимальное разделение по дальности, при котором радар может различать две цели. Единицы в метрах.
Пример: 5.0
Range rate resolution of radar (m/s) - Разрешающая способность РЛС по дальности0.5 (по умолчанию) | положительный вещественный скалярДальномерное разрешение РЛС, определяемое как положительный действительный скаляр. Разрешение скорости дальности определяет минимальное разделение в скорости дальности, при котором радар может различать две цели. Единицы измерения в метрах в секунду.
Пример: 0.75
Чтобы включить этот параметр, установите флажок Включить измерения скорости диапазона.
Fractional azimuthal bias component of radar - Фракция смещения азимута0.1 (по умолчанию) | неотрицательный вещественный скалярАзимутальная доля смещения РЛС, заданная как неотрицательный действительный скаляр. Азимутальное смещение выражается как доля азимутального разрешения, указанного в азимутальном разрешении параметра РЛС (град.). Единицы измерения безразмерны.
Пример: 0.3
Fractional elevation bias component of radar - Фракция смещения по высоте0.1 (по умолчанию) | неотрицательный вещественный скалярДоля смещения по высоте РЛС, определяемая как неотрицательный действительный скаляр. Смещение по отметке выражается как доля от разрешения по отметке, указанного в параметре Разрешение по отметке РЛС (град.). Единицы измерения безразмерны.
Пример: 0.2
Для включения этого параметра установите флажок «Включить измерения угла возвышения».
Fractional range bias component of radar - Фракция смещения диапазона0.05 (по умолчанию) | неотрицательный вещественный скалярДоля смещения дальности РЛС, определяемая как неотрицательный действительный скаляр. Смещение по дальности выражается как доля разрешения по дальности, указанного в параметре Разрешение по дальности РЛС (м). Единицы измерения безразмерны.
Пример: 0.15
Fractional range rate bias component of radar - доля смещения скорости дальности РЛС0.05 (по умолчанию) | неотрицательный вещественный скалярДальномерная доля смещения РЛС, заданная как неотрицательный действительный скаляр. Смещение скорости диапазона выражается в виде доли разрешения скорости диапазона, указанного в параметре Range rate resolution of radar (m). Единицы измерения безразмерны.
Пример: 0.2
Чтобы включить этот параметр, установите флажок Включить измерения скорости диапазона.
Total angular field of view for radar (deg) - Поле зрения датчика БРЛС[20 5] (по умолчанию) | действительный вектор 1 на 2 положительных значенийПоле зрения БРЛС, определяемое как действительный вектор 1 на 2 положительных значений, [azfov elfov]. Поле зрения определяет угловую протяженность, охватываемую датчиком. Каждый компонент должен находиться в интервале (0,180]. Цели вне поля зрения РЛС не обнаружены. Единицы измерения в градусах.
Пример: [14 7]
Maximum detection range (m) - Максимальный диапазон обнаружения150 (по умолчанию) | положительный вещественный скалярМаксимальный диапазон обнаружения, заданный как положительный действительный скаляр. РЛС не может обнаружить цель за пределами этой дальности. Единицы в метрах.
Пример: 250
Minimum and maximum range rates that can be reported - Минимальная и максимальная дальность обнаружения[-100 100] (по умолчанию) | действительный вектор 1 на 2Минимальная и максимальная дальность обнаружения, заданная как действительный вектор 1 на 2. Радар не может обнаружить цель за пределами этого интервала дальности. Единицы измерения в метрах в секунду.
Пример: [-200 200]
Чтобы включить этот параметр, установите флажок Включить измерения скорости диапазона.
Detection probability - Вероятность обнаружения цели0.9 (по умолчанию) | положительный действительный скаляр, меньший или равный 1Вероятность обнаружения цели, заданная как положительный действительный скаляр, меньший или равный единице. Эта величина определяет вероятность обнаружения цели, имеющей сечение РЛС, определяемое параметром РЛС, при котором достигается вероятность обнаружения (дБсм) на опорном диапазоне обнаружения, определяемом параметром Диапазон, при котором достигается вероятность обнаружения (м).
Пример: 0.95
Rate at which false alarms are reported - Частота ложных аварийных сигналов1e-6 (по умолчанию) | положительный вещественный скалярЧастота ложных аварийных сигналов в ячейке разрешения радара, заданная как положительный действительный скаляр в диапазоне [10-7, 10-3]. Единицы измерения безразмерны.
Пример: 1e-5
Range where detection probability is achieved (m): - Эталонный диапазон для данной вероятности обнаружения100 (по умолчанию) | положительный вещественный скалярОпорный диапазон для данной вероятности обнаружения, определяемый как положительный действительный скаляр. Опорная дальность - это дальность, при которой цель, имеющая радиолокационное сечение, определенное радиолокационным сечением, при котором достигается вероятность обнаружения (дБсм), обнаруживается с вероятностью, заданной по вероятности обнаружения. Единицы в метрах.
Пример: 150
Radar cross section at which detection probability is achieved (dBsm) - Эталонное сечение РЛС для заданной вероятности обнаружения0.0 (по умолчанию) | неотрицательный вещественный скалярЭталонное сечение РЛС (RCS) для заданной вероятности обнаружения, определяемое как неотрицательный действительный скаляр. Опорная RCS - это значение, при котором цель обнаруживается с вероятностью, заданной вероятностью обнаружения. Единицы измерения находятся в дБсм.
Пример: 2.0
Enable elevation angle measurements - Включить РЛС для измерения отметкиoff (по умолчанию) | onУстановите этот флажок для моделирования радара, который может измерять целевые углы возвышения.
Enable range rate measurements - Включить РЛС для измерения дальностиon (по умолчанию) | off | onУстановите этот флажок для моделирования радара, который может измерять скорость целевого диапазона.
Add noise to measurements - Включить добавление шума к измерениям радиолокационных датчиковon (по умолчанию) | offУстановите этот флажок, чтобы добавить шум к измерениям радиолокационного датчика. В противном случае измерения не содержат шума. MeasurementNoise свойство каждого обнаружения всегда вычисляется и не зависит от значения, указанного для параметра Add noise to measurements. Оставив этот флажок off, вы можете передать измерения истинности земли датчика в блок Multi-Object Tracker.
Enable false detections - Включить создание ложных аварийных радиолокационных обнаруженийon (по умолчанию) | offУстановите этот флажок, чтобы включить сообщение о ложных радиолокационных измерениях аварийных сигналов. В противном случае сообщается только о фактических обнаружениях.
Select method to specify initial seed - Метод определения начального числа генератора случайных чиселRepeatable (по умолчанию) | Specify seed | Not repeatableМетод установки начального значения генератора случайных чисел, указанного как один из параметров в таблице.
| Выбор | Описание |
|---|---|
Repeatable | Блок генерирует случайное начальное начальное число для первого моделирования и повторно использует это начальное число для всех последующих моделирований. Выберите этот параметр для создания воспроизводимых результатов из статистической модели датчика. Для изменения начального начального значения в командной строке MATLAB введите: |
Specify seed | Укажите собственное произвольное начальное значение для воспроизводимых результатов с помощью параметра Указать начальное значение (Specify seed). |
Not repeatable | Блок генерирует новое случайное начальное начальное значение после каждого прогона моделирования. Выберите этот параметр, чтобы создать неповторяемые результаты из статистической модели датчика. |
Initial seed - Начальное число генератора случайных чисел0 (по умолчанию) | неотрицательное целое число менее 232Начальное число генератора случайных чисел, указанное как неотрицательное целое число меньше 232.
Пример: 2001
Чтобы включить этот параметр, установите Random Number Generator Settings параметр для Specify seed.
Select method to specify actor profiles - Метод определения профилей субъектовFrom Scenario Reader block (по умолчанию) | Parameters | MATLAB expressionМетод определения профилей субъектов, которые являются физическими и радиолокационными характеристиками всех субъектов в сценарии вождения, определяемый как один из следующих вариантов:
From Scenario Reader block - блок получает профили субъектов из сценария, указанного блоком чтения сценариев.
Parameters - блок получает профили актера из параметров, которые становятся включенными на вкладке Профили актера.
From workspace - блок получает профили актера из выражения MATLAB, указанного параметром MATLAB для профилей актера.
MATLAB expression for actor profiles - выражение MATLAB для профилей субъектовstruct('ClassID',0,'Length',4.7,'Width',1.8,'Height',1.4,'OriginOffset',[-1.35,0,0]) (по умолчанию) | структура MATLAB | массив структуры MATLAB | допустимое выражение MATLABВыражение MATLAB для профилей субъектов, указанное как структура MATLAB, массив структуры MATLAB или допустимое выражение MATLAB, которое создает такую структуру или массив структуры.
Если блок чтения сценариев считывает данные из drivingScenario , чтобы получить профили актера непосредственно из этого объекта, задайте для этого выражения вызов actorProfiles функция на объекте. Например: actorProfiles(scenario).
Пример: struct('ClassID',5,'Length',5.0,'Width',2,'Height',2,'OriginOffset',[-1.55,0,0])
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным MATLAB expression.
Unique identifier for actors - Определяемый сценарием идентификатор субъекта[] (по умолчанию) | положительное целое | длина - L вектор уникальных положительных целых чиселОпределяемый сценарием идентификатор субъекта, заданный как положительное целое число или L-вектор уникальных положительных чисел. L должен равняться числу действующих лиц, вводимых в порт ввода действующего лица. Элементы вектора должны совпадать ActorID ценности актеров. Можно указать уникальный идентификатор для субъектов как []. В этом случае одни и те же параметры профиля актера применяются ко всем актерам.
Пример: [1,2]
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
User-defined integer to classify actors - Определяемый пользователем идентификатор классификации0 (по умолчанию) | целое | длина - L вектор целых чиселОпределяемый пользователем идентификатор классификации, заданный как целое число или L-вектор целых чисел. Если Unique identifier for actors является вектором, этот параметр является вектором одинаковой длины с элементами в однозначном соответствии с актерами в Unique identifier for actors. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как одно целое число, значение которого применяется ко всем актерам.
Пример: 2
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Length of actors cuboids (m) - Длина кубоида4.7 (по умолчанию) | положительный вещественный скаляр | длина-L вектор положительных значенийДлина кубоида, заданная как положительный действительный скаляр или L-вектор положительных значений. Если Unique identifier for actors является вектором, этот параметр является вектором одинаковой длины с элементами в однозначном соответствии с актерами в Unique identifier for actors. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как положительный действительный скаляр, значение которого применяется ко всем актерам. Единицы в метрах.
Пример: 6.3
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Width of actors cuboids (m) - Ширина кубоида4.7 (по умолчанию) | положительный вещественный скаляр | длина-L вектор положительных значенийШирина кубоида, заданная как положительный действительный скаляр или L-вектор положительных значений. Если Unique identifier for actors является вектором, этот параметр является вектором одинаковой длины с элементами в однозначном соответствии с актерами в Unique identifier for actors. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как положительный действительный скаляр, значение которого применяется ко всем актерам. Единицы в метрах.
Пример: 4.7
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Height of actors cuboids (m) - Высота кубоида4.7 (по умолчанию) | положительный вещественный скаляр | длина-L вектор положительных значенийВысота кубоида, заданная как положительный действительный скаляр или L-вектор положительных значений. Если Unique identifier for actors является вектором, этот параметр является вектором одинаковой длины с элементами в однозначном соответствии с актерами в Unique identifier for actors. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как положительный действительный скаляр, значение которого применяется ко всем актерам. Единицы в метрах.
Пример: 2.0
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Rotational center of actors from bottom center (m) - Вращательный центр актераЦентр вращения актера, заданный как массив ячеек длины L вещественных векторов 1 на 3. Каждый вектор представляет смещение центра вращения актера от нижнего центра актера. Для транспортных средств смещение соответствует точке на земле под центром задней оси. Если Unique identifier for actors является вектором, этот параметр представляет собой клеточный массив векторов с ячейками в соответствии один к одному с актерами в Unique identifier for actors. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как массив ячеек одного элемента, содержащего вектор смещения, значения которого применяются ко всем актерам. Единицы в метрах.
Пример: [-1.35, .2, .3]
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Radar cross section pattern (dBsm) - Сечение РЛС{[10,10;10,10]} (по умолчанию) | матрица Q-by-P с действительным значением | массив ячеек length-L для матриц Q-by-P с действительным значениемРадиолокационное сечение (RCS) актера, определяемое как вещественно-значимая матрица Q-на-P или матрица ячеек длины-L вещественно-значимых матриц Q-на-P. Q - количество углов возвышения, заданное соответствующей ячейкой в поле «Углы возвышения», определяющем параметр RCSPattern (град.). P - количество азимутальных углов, заданное соответствующей ячейкой в азимутальных углах, определяющих свойство RCSPattern (град.). Если Unique identifier for actors является вектором, этот параметр представляет собой массив ячеек матриц с ячейками в соответствии один к одному с актерами в Unique identifier for actors. Q и P могут изменяться в массиве ячеек. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как массив ячеек с одним элементом, содержащим матрицу, значения которой применяются ко всем субъектам. Единицы измерения находятся в дБсм.
Пример: [10 14 10; 9 13 9]
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Azimuth angles defining RCSPattern (deg) - Азимутальные углы схемы сечения РЛС{[-180 180]} (по умолчанию) | length-L массив ячеек действительных векторов P-длиныАзимутальные углы диаграммы сечения РЛС, определяемые как массив ячеек длины-L действительных векторов длины P. Каждый вектор представляет азимутальные углы Р-столбцов сечения РЛС, указанные в схеме сечения РЛС (дБсм). Если Unique identifier for actors является вектором, этот параметр представляет собой клеточный массив векторов с ячейками в соответствии один к одному с актерами в Unique identifier for actors. P может изменяться в массиве ячеек. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как массив ячеек с одним элементом, содержащим вектор, значения которого применяются ко всем актерам. Единицы измерения в градусах. Азимутальные углы лежат в диапазоне от -180 ° до 180 ° и должны быть в строго возрастающем порядке.
Если сечения радара, указанные в ячейках шаблона сечения радара (dBsm), имеют одинаковые размеры, необходимо указать только массив ячеек с одним элементом, содержащим вектор угла азимута.
Пример: [-90:90]
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
Elevation angles defining RCSPattern (deg) - Углы места схемы сечения РЛС{[-90 90]} (по умолчанию) | length-L массив ячеек вещественных Q-векторов длиныУглы возвышения диаграммы сечения РЛС, определяемые как массив ячеек length-L действительных векторов Q-длины. Каждый вектор представляет углы возвышения Q-столбцов сечения РЛС, указанные в схеме сечения РЛС (дБсм). Если Unique identifier for actors является вектором, этот параметр представляет собой клеточный массив векторов с ячейками в соответствии один к одному с актерами в Unique identifier for actors. Q может изменяться в массиве ячеек. Если уникальный идентификатор для субъектов пуст, [], необходимо указать этот параметр как массив ячеек с одним элементом, содержащим вектор, значения которого применяются ко всем актерам. Единицы измерения в градусах. Углы возвышения лежат в диапазоне от -90 ° до 90 ° и должны быть в строго возрастающем порядке.
Если сечения радара, указанные в ячейках шаблона сечения радара (dBsm), имеют одинаковые размеры, необходимо указать только массив ячеек с одним элементом, содержащим вектор угла возвышения.
Пример: [-25:25]
Чтобы включить этот параметр, установите метод Select, чтобы задать параметр профиля актера, равным Parameters.
radarDetectionGenerator Не рекомендуется использовать системный объект и блок генератора радиолокационного обнаруженияНе рекомендуется начинать с R2021a
radarDetectionGenerator object™ системы и блок генератора радиолокационного обнаружения не рекомендуется, если не требуется генерация кода C/C + +. Вместо этого используйте drivingRadarDataGenerator Системный объект и генератор радиолокационных данных соответственно. Эти новые радиолокационные датчики обеспечивают дополнительные свойства для моделирования радиолокационных датчиков, включая возможность генерации следов и кластеризованных обнаружений.
Нет текущих планов для удаления radarDetectionGenerator Системный объект или блок генератора радиолокационного обнаружения. Модели MATLAB и Simulink, использующие эти функции, будут продолжать работать. Вы по-прежнему можете импортировать radarDetectionGenerator объекты в приложении Дизайнер сценариев управления. Однако приложение обновляет параметры импортированного датчика, чтобы отразить параметры drivingRadarDataGenerator объект. Кроме того, при экспорте сценария, содержащего radarDetectionGenerator сенсор в код MATLAB или в модель Simulink, приложение экспортирует сенсор как drivingRadarDataGenerator объект или блок генератора радиолокационных данных соответственно.
В коде MATLAB замените все экземпляры radarDetectionGenerator с drivingRadarDataGenerator. Кроме того, обновить все radarDetectionGenerator свойства с их эквивалентом drivingRadarDataGenerator , как показано в таблице. Свойства, не перечисленные в таблице, относятся только к drivingRadarDataGenerator или идентичные в обоих объектах.
radarDetectionGenerator Свойства | Эквивалентный drivingRadarDataGenerator Свойства |
|---|---|
|
|
|
|
|
|
| RangeLimits |
|
|
|
|
|
|
В этой таблице показан пример кода для создания drivingRadarDataGenerator объект вместо radarDetectionGenerator объект.
| Обескураженное использование | Рекомендуемая замена |
|---|---|
radar = radarDetectionGenerator( ... 'SensorLocation',[-1 0], ... 'Height',0.2, ... 'Yaw',180, ... 'Pitch',0, ... 'Roll',0, ... 'MaxRange',50); | radar = drivingRadarDataGenerator( ... 'MountingLocation',[-1 0 0.2], ... 'MountingAngles',[180 0 0], ... 'RangeLimits',[0 50]); |
Для генерации обнаружений из целевых позиций на каждом этапе моделирования замените dets = radarDetectionGenerator(targets,time) синтаксис с dets = drivingRadarDataGenerator(targets,time).
В моделях Simulink замените все блоки генератора радиолокационного обнаружения на блоки генератора управляющих радиолокационных данных. В блоках генератора радиолокационных данных обновите значения параметров таким же образом, как и drivingRadarDataGenerator значения свойств, описанные в разделе «Обновление кода».
Если модель содержит отдельный блок, который позволяет обнаруживать кластеры, ее можно удалить, так как по умолчанию блок «Генератор данных радара» (Driving Radar Data Generator) блокирует обнаруженные кластеры.
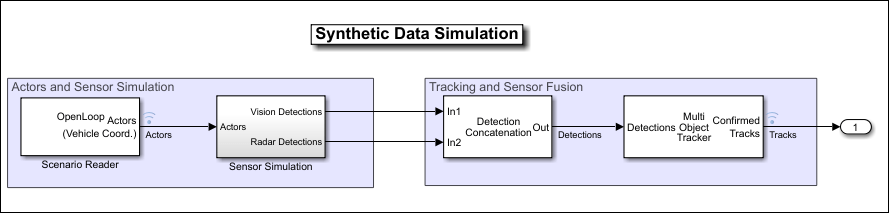
Например, в этой модели подсистема моделирования датчиков выводит конкатенированные обнаруженные сигналы из блоков генератора радиолокационного обнаружения в отдельный блок, который объединяет обнаруженные сигналы.

В этой модели подсистема симуляции датчиков выводит конкатенированные, кластеризованные обнаруженные сигналы из блоков генератора радиолокационных данных непосредственно в следующую часть конвейера модели.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
