Вычисление выходных данных, ошибок и коэффициентов с помощью адаптивного фильтра КИХ частотной области
dsp.FrequencyDomainAdaptiveFilter Система object™ реализует адаптивный фильтр конечной импульсной характеристики (FIR) в частотной области с использованием алгоритма быстрых блочных наименьших квадратов (LMS). Свойства Length и BlockLength определяют длину фильтра и значения длины блока, используемые алгоритмом. Свойство FFTCoefficients содержит дискретное преобразование Фурье текущих коэффициентов фильтра. Объект предлагает ограниченную и неограниченную версии алгоритма с секционированным и несекционированным режимами. Дополнительные сведения см. в разделе Алгоритмы.
Для фильтрации сигнала с помощью частотно-доменного FIR-адаптивного фильтра:
Создать dsp.FrequencyDomainAdaptiveFilter и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
fdaf = dsp.FrequencyDomainAdaptiveFilterfdaf. Этот системный объект используется для вычисления отфильтрованного выходного сигнала и ошибки фильтра для данного входного сигнала и требуемого сигнала.
fdaf = dsp.FrequencyDomainAdaptiveFilter(len)Length свойство имеет значение len.
fdaf = dsp.FrequencyDomainAdaptiveFilter(___,Name,Value)
fdaf = dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',0.1) моделирует адаптивный фильтр частотной области длиной 32 отвода и размером шага 0,1.[ фильтрует входной сигнал, y,err] = fdaf(x,d)x, использование d в качестве требуемого сигнала и возвращает отфильтрованный выходной сигнал в y и ошибка фильтра в err. Объект System оценивает весовые коэффициенты фильтра, необходимые для минимизации ошибки между выходным сигналом и требуемым сигналом. БПФ этих весов фильтра может быть получен путем доступа к FFTCoefficients после вызова алгоритма объекта.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Передача сигнала квадратурной фазовой манипуляции (QPSK) по шумному каналу передачи. Минимизируйте шум в принятом сигнале, используя адаптивный фильтр частотной области.
Примечание.При использовании R2016a или более ранней версии замените каждый вызов объекта синтаксисом эквивалентного шага. Например, obj(x) становится step(obj,x).
Сигнал QPSK, s, передается по шумному каналу. Числительные и знаменательные коэффициенты канала содержатся в векторах b и a соответственно. Принятый сигнал r, полученный в конце канала передачи, содержит переданный сигнал QPSK и шум, добавленный в канал, n. Адаптивный фильтр используется для извлечения сигнала QPSK из принятого шумового входа. Требуемый сигнал d представляет собой задержанную версию сигнала QPSK.
D = 16; b = exp(1i*pi/4)*[-0.7 1]; a = [1 -0.7]; ntr = 1024; s = sign(randn(1,ntr+D)) + 1i*sign(randn(1,ntr+D)); n = 0.1*(randn(1,ntr+D) + 1i*randn(1,ntr+D)); r = filter(b,a,s) + n; x = r(1+D:ntr+D); d = s(1:ntr);
Создать dsp.FrequencyDomainAdaptiveFilter объект для моделирования адаптивного фильтра частотной области длиной 32 отводов и размером шага 0,1. Адаптивный фильтр принимает задержанную версию принятого сигнала и требуемый сигнал в качестве входных сигналов. Выходной сигнал адаптивного фильтра сравнивается с требуемым сигналом. Ошибка между двумя сигналами представляет шум, добавленный к каналу передачи. Адаптивный фильтр обновляет свои коэффициенты до тех пор, пока эта ошибка не станет минимальной. Чтобы получить дискретное преобразование Фурье коэффициентов фильтра, вызовите fdaf и получить доступ к свойству FFTCoefficients этого объекта.
mu = 0.1; fdaf = dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',mu); [y,e] = fdaf(x,d); fftCoeffs = fdaf.FFTCoefficients
fftCoeffs = 1×64 complex
0.6802 - 0.6847i -0.2485 - 0.9427i -0.9675 - 0.2123i -0.5605 + 0.8002i 0.5748 + 0.7593i 0.8541 - 0.3917i -0.2526 - 0.9022i -0.9298 + 0.1255i 0.0181 + 0.9366i 0.9207 + 0.0511i 0.1063 - 0.8972i -0.8919 - 0.1829i -0.2668 + 0.9113i 0.9215 + 0.3186i 0.3417 - 0.8859i -0.8285 - 0.3760i -0.4317 + 0.8200i 0.8741 + 0.4765i 0.4874 - 0.9075i -0.8517 - 0.4774i -0.4709 + 0.7632i 0.7468 + 0.4833i 0.5193 - 0.7995i -0.8218 - 0.5649i -0.5908 + 0.7768i 0.7316 + 0.5866i 0.5806 - 0.7270i -0.7148 - 0.5998i -0.6287 + 0.6702i 0.6575 + 0.6379i 0.6332 - 0.7153i -0.7659 - 0.6424i -0.6678 + 0.7294i 0.6536 + 0.6891i 0.7006 - 0.6333i -0.6594 - 0.7117i -0.7207 + 0.6517i 0.6031 + 0.7239i 0.7362 - 0.5776i -0.5869 - 0.7682i -0.7975 + 0.5789i 0.5449 + 0.7992i 0.7909 - 0.5343i -0.5512 - 0.8070i -0.8392 + 0.5338i 0.4605 + 0.8493i 0.8358 - 0.3921i -0.3751 - 0.8388i -0.8739 + 0.3785i 0.3625 + 0.9048i
Постройте график синфазных и квадратурных компонентов требуемых выходных сигналов и сигналов ошибок.
plot(1:ntr,real([d;y;e])) legend('Desired','Output','Error') title('In-Phase Components') xlabel('Time Index'); ylabel('signal value')

plot(1:ntr,imag([d;y;e])) legend('Desired','Output','Error') title('Quadrature Components') xlabel('Time Index') ylabel('signal value')

Создайте графики рассеяния принятого сигнала и требуемого сигнала.
plot(x(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Received Signal Scatter Plot') axis('square') xlabel('Real[x]') ylabel('Imag[x]') grid on

plot(d(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Desired Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on

Адаптивный фильтр выравнивает принятый сигнал для устранения шума. Постройте график рассеяния выровненного сигнала.
plot(y(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Equalized Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on

Используйте адаптивный фильтр частотной области для оценки коэффициентов длинного КИХ-фильтра. Фильтр FIR моделирует импульсную характеристику помещения. Используйте секционированный режим в адаптивном фильтре частотной области для уменьшения задержки фильтра.
Примечание.Этот пример выполняется только в R2018a или более поздних версиях.
Инициализация
Создайте длинную импульсную характеристику FIR из 8192 выборок и назначьте импульсную характеристику dsp.FIRFilter объект, room. Этот объект моделирует импульсную характеристику комнаты. Создать dsp.FrequencyDomainAdaptiveFilter фильтр, lmsfilt, в режиме секционированного ограничения. Установите длину фильтра равной одной четвертой длины импульсной характеристики помещения. Установите длину блока фильтра равной 128 выборкам. Задайте размер шага 0,025, начальную мощность 0,01, средний коэффициент 0,98, смещение 1 и коэффициент утечки 1. Инициализация dsp.ArrayPlot объект для просмотра коэффициентов фильтра. Инициализация timescope объект для отображения среднеквадратичной ошибки между выходом фильтра и требуемым сигналом.
fs = 16e3; m = 8192; [b,a] = cheby2(4,20,[0.1 0.7]); impulseResponseGenerator = dsp.IIRFilter(... 'Numerator', [zeros(1,6) b], ... 'Denominator', a); roomImpulseResponse = impulseResponseGenerator( ... (log(0.99*rand(1,m)+0.01).*sign(randn(1,m)).*exp(-0.002*(1:m)))'); roomImpulseResponse = roomImpulseResponse/norm(roomImpulseResponse); room = dsp.FIRFilter('Numerator',roomImpulseResponse'); lmsfilt = dsp.FrequencyDomainAdaptiveFilter(... 'Method','Partitioned constrained FDAF',... 'Length',m/4, ... 'BlockLength',128,... 'StepSize',0.025, ... 'InitialPower',0.01, ... 'AveragingFactor',0.98,... 'Offset',1,... 'LeakageFactor',1); FrameSize = lmsfilt.BlockLength; NIter = 2000; AP = dsp.ArrayPlot('YLimits',[-0.2 .2],'ShowLegend',true, ... 'Position',[0 0 560 420],'ChannelNames', ... {'Actual Coefficients','Estimated Coefficients'}); TS = timescope('SampleRate',fs,'TimeSpanSource','property',... 'TimeSpan',FrameSize*NIter/fs,... 'TimeUnits','Seconds',... 'YLimits',[-50 0],'Title','Learning curve',... 'YLabel','dB', ... 'BufferLength',FrameSize*NIter,... 'ShowGrid',true); signalmean = dsp.MovingAverage('SpecifyWindowLength',false);
Вытекание
Генерировать случайный входной сигнал с помощью randn функция. Размер кадра на входе соответствует длине блока адаптивного фильтра. Требуемый сигнал представляет собой сумму выходного сигнала КИХ-фильтра (помещения) и сигнала белого гауссова шума. Передайте входной сигнал и требуемый сигнал в адаптивный фильтр. Вычислите выходной сигнал адаптивного фильтра и ошибку между выходным сигналом и требуемым сигналом.
Оцените коэффициенты временной области адаптивного фильтра, взяв IFFT вектора коэффициентов частотной области, возвращаемого lmsfilt.FFTCoefficients собственность. Сравните расчетные коэффициенты с фактическими коэффициентами, назначенными фильтру FIR (помещение). Как только адаптивный фильтр конвергирует свой выходной сигнал с требуемым сигналом и минимизирует сигнал ошибки, оцененные коэффициенты близко совпадают с фактическими коэффициентами. Это означает, что адаптивный фильтр успешно адаптировался для моделирования импульсной характеристики КИХ-фильтра (помещения).
for k = 1:NIter x = randn(FrameSize,1); d = room(x) + 0.01*randn(FrameSize,1); [y,e] = lmsfilt(x,d); FFTCoeffs = lmsfilt.FFTCoefficients; w = ifft(FFTCoeffs,[],2,'symmetric'); w = w(:,1:FrameSize) + w(:,FrameSize+1:end); w = reshape(w.',1,m/4); AP([roomImpulseResponse(1:m/4),w.']); TS(10*log10(signalmean(abs(e).^2))); end


Когда фильтр адаптируется со временем, в области времени видно, что среднеквадратичная ошибка становится минимальной. Одновременно оцененные коэффициенты близко совпадают с фактическими коэффициентами на графике массива.
Адаптивная фильтрация в частотной области состоит из трех этапов - фильтрация, оценка ошибок и адаптация веса отводов. Этот алгоритм реализует фильтрацию FIR в частотной области с использованием метода overlap-save или overlap-add. Дополнительные сведения о реализации этих двух методов см. в разделе Алгоритмы в dsp.FrequencyDomainFIRFilter страница объекта. Оценка ошибок и адаптация веса отводов реализуются с использованием алгоритма быстрого блочного LMS (FBLMS).
Адаптивный фильтр частотной области обрабатывает входные данные и требуемые данные сигнала как блок выборок с использованием алгоритма быстрого блока LMS (FBLMS). Ниже приведена блок-схема адаптивного фильтра частотной области с использованием алгоритма FBLMS. Фильтр FIR частотной области на этой диаграмме использует метод наложения-сохранения.
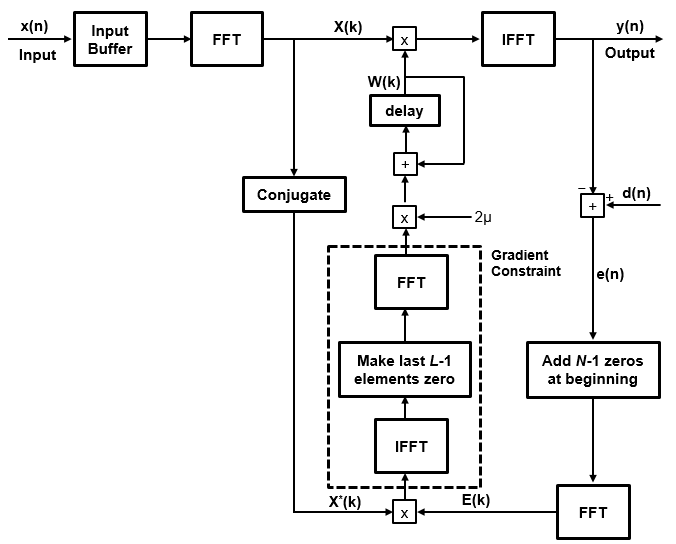
где:
N -- Длина фильтра
L -- Длина блока
λ -- Параметр размера шага
x (n) -- Входной сигнал
X (k) - преобразованный входной сигнал в частотной области
d (n) -- Требуемый сигнал
e (n) - Ошибка между требуемым сигналом и выходом фильтра
E (n) - преобразованный сигнал ошибки в частотной области
W (k) -- Вектор «Tap-weights» в частотной области
Для получения дополнительной информации о том, как оценивается ошибка и адаптируются веса отводов, см. [2].
[1] Shynk, J.J. «Частотно-доменная и многоскоростная адаптивная фильтрация». Журнал обработки сигналов IEEE. Том 9, номер 1, 1992, стр. 14-37.
[2] Фарханг-Боруджени, Б., Адаптивные фильтры: теория и применение, Чичестер, Англия, Уайли, 1998.
[3] Штокам, Т. Г., младший «Высокоскоростное свертывание и корреляция». Материалы Весенней совместной компьютерной конференции 1966 года, AFIPS, том 28, 1966 год, стр. 229-233.
dsp.AdaptiveLatticeFilter | dsp.AffineProjectionFilter | dsp.FastTransversalFilter | dsp.FilteredXLMSFilter | dsp.FIRFilter | dsp.FrequencyDomainFIRFilter | dsp.LMSFilter | dsp.RLSFilter