Постройте график моделируемой временной реакции динамической системы на произвольные входы; смоделированные данные ответа
lsim( строит график смоделированной временной характеристики динамической модели системы
sys,u,t)sys в историю ввода (t,u). Вектор t задает временные выборки для моделирования. Для систем с одним входом входной сигнал u - вектор той же длины, что и t. Для систем с множеством входов, u является массивом с таким количеством строк, сколько имеется отсчетов времени (length(t)) и столько столбцов, сколько имеется входных данных sys.
lsim( моделирует отклики нескольких динамических моделей системы на одну и ту же историю ввода и строит графики этих откликов на одном рисунке. Все системы должны иметь одинаковое количество входов и выходов. Вы также можете использовать sys1,sys2,...,sysN,u,t,___)x0 и method входные аргументы при вычислении откликов нескольких моделей.
y = lsim(sys,u,t)y, отобранные в одно и то же время t в качестве входных данных. Для систем с одним выходом, y - вектор той же длины, что и t. Для систем с несколькими выходами, y является массивом, имеющим столько строк, сколько имеется отсчетов времени (length(t)) и столько столбцов, сколько есть выходов в sys. Этот синтаксис не создает график.
[ возвращает траектории состояния y,tOut,x] = lsim(___)x, когда sys является моделью пространства состояний. x является массивом, содержащим столько строк, сколько имеется отсчетов времени и столько столбцов, сколько имеется состояний в sys. Этот синтаксис также возвращает временные выборки, используемые для моделирования в tOut.
lsim( открывает инструмент линейного моделирования. Дополнительные сведения об использовании этого инструмента для линейного анализа см. в разделе Работа с инструментом линейного моделирования (панель инструментов системы управления).sys)
Рассмотрим следующую передаточную функцию.
sys = tf(3,[1 2 3])
sys =
3
-------------
s^2 + 2 s + 3
Continuous-time transfer function.
Для вычисления отклика этой системы на произвольный входной сигнал предусмотреть lsim с вектором времени t при котором требуется вычислить отклик и вектор u содержащий соответствующие значения сигнала. Например, постройте график ответа системы на сигнал шага нарастания, который начинается в 0 в момент времени. t = 0, пандусы от 0 при t = 1 до 1 при t = 2, а затем устойчиво держится на уровне 1. Определить t и вычислить значения u.
t = 0:0.04:8; % 201 points
u = max(0,min(t-1,1));Использовать lsim без выходного аргумента для построения графика ответа системы на сигнал.
lsim(sys,u,t)
grid on
На графике показаны примененные входные данные (u,t) серым цветом, а отклик системы - синим.
Использовать lsim с выходным аргументом для получения смоделированных данных ответа.
y = lsim(sys,u,t); size(y)
ans = 1×2
201 1
Вектор y содержит смоделированный ответ в соответствующее время в t.
Использовать gensig(Панель инструментов системы управления) для создания периодических входных сигналов, таких как синусоидальные и квадратные волны, для использования с lsim. Моделирование отклика на квадратную волну следующей модели состояния-пространства SISO.
A = [-3 -1.5; 5 0]; B = [1; 0]; C = [0.5 1.5]; D = 0; sys = ss(A,B,C,D);
Для этого примера создайте квадратную волну с периодом 10 с и длительностью 20 с.
[u,t] = gensig("square",10,20);gensig возвращает вектор t временных шагов и вектора u содержащий соответствующие значения входного сигнала. (Если не указать время выборки для t, то gensig генерирует 64 выборки за период.) Используйте их с lsim и постройте график ответа системы.
lsim(sys,u,t)
grid on
График показывает приложенную квадратную волну серым цветом и отклик системы синим. Звонить lsim с выходным аргументом для получения значений ответа в каждой точке в t.
[y,~] = lsim(sys,u,t);
При моделировании отклика дискретно-временной системы вектор времени t должен иметь форму Ti:dT:Tf, где dT - время выборки модели. Смоделировать отклик следующей дискретно-временной передаточной функции на вход шага клина.
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
Эта передаточная функция имеет время выборки 0,05. Используйте то же время выборки для генерации вектора времени. t и сигнал ступенчатого шага u.
t = 0:0.05:4; u = max(0,min(t-1,1));
Постройте график ответа системы.
lsim(sys,u,t)

Для моделирования отклика дискретно-временной системы на периодический входной сигнал используйте одно и то же время выборки с gensig для формирования входных данных. Например, смоделировать отклик системы на синусоидальную волну с периодом 1 с и длительностью 4 с.
[u,t] = gensig("sine",1,4,0.05);Постройте график ответа системы.
lsim(sys,u,t)

lsim позволяет построить график смоделированных откликов нескольких динамических систем на одной оси. Например, сравните отклик системы по замкнутому контуру с PI-контроллером и PID-контроллером. Создайте передаточную функцию системы и настройте контроллеры.
H = tf(4,[1 10 25]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Сформировать замкнутые системы.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1);
Постройте график откликов обеих систем на квадратную волну с периодом 4 с.
[u,t] = gensig("square",4,12); lsim(sys1,sys2,u,t) grid on legend("PI","PID")

По умолчанию lsim выбирает различные цвета для каждой системы, для которой выполняется печать. Цвета и стили линий можно задать с помощью команды LineSpec входной аргумент.
lsim(sys1,"r--",sys2,"b",u,t) grid on legend("PI","PID")

Первое LineSpec "r--" указывает пунктирную красную линию для ответа с PI-контроллером. Второе LineSpec "b" указывает сплошную синюю линию для ответа с контроллером PID. Легенда отражает заданные цвета и стили линий. Для получения дополнительных параметров настройки печати используйте lsimplot.
В системе MIMO на каждом шаге времени t, вход u(t) - вектор, длина которого является числом входов. Использовать lsim, вы указываете u как матрица с размерами Ntоколо-Nu, где Nu - количество системных входов и Nt - длина t. Другими словами, каждый столбец u - входной сигнал, подаваемый на соответствующий системный вход. Например, чтобы смоделировать систему с четырьмя входами в течение 201 шага времени, обеспечьте u в виде матрицы из четырех столбцов и 201 строки, где каждая строка u(i,:) - вектор входных значений в iтретий временной шаг; каждый столбец u(:,j) - сигнал, подаваемый в j-й вход.
Аналогично, выходные данные y(t) вычислено по lsim - матрица, столбцы которой представляют сигнал на каждом системном выходе. При использовании lsim для построения графика смоделированного ответа, lsim обеспечивает отдельные оси для каждого выхода, представляющие отклик системы в каждом выходном канале на вход u(t) применяется на всех входах.
Рассмотрим модель пространства состояний с двумя входами и тремя выходами со следующими матрицами пространства состояний.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.5 -0.1;
0.35 -0.1 -0.15
0.65 0 0.6];
D = [ 0.5 0;
0.05 0.75
0 0];
sys = ss(A,B,C,D);Постройте график ответа sys к квадратной волне периода 4 с, применяемой к первому входу sys и импульс, подаваемый на второй вход каждые 3 с. Для этого создайте векторы столбцов, представляющие квадратную волну и импульсный сигнал, используя gensig. Затем скопируйте столбцы во входную матрицу. Чтобы два сигнала имели одинаковое количество выборок, укажите одинаковое время окончания и время выборки.
Tf = 10; Ts = 0.1; [uSq,t] = gensig("square",4,Tf,Ts); [uP,~] = gensig("pulse",3,Tf,Ts); u = [uSq uP]; lsim(sys,u,t)

Каждая ось показывает отклик одного из трех выходов системы на сигналы u применяется на всех входах. На каждом графике также показаны все входные сигналы серым цветом.
По умолчанию lsim моделирует модель, предполагая, что все состояния равны нулю в начале моделирования. При моделировании отклика модели пространства состояний используйте опциональное x0 входной аргумент для указания ненулевых значений начального состояния. Рассмотрим следующую модель состояния-пространства SISO с двумя состояниями.
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);Предположим, что необходимо разрешить системе эволюционировать из известного набора начальных состояний без ввода в течение 2 с, а затем применить единичное изменение шага. Укажите вектор x0 исходных значений состояния и создать входной вектор.
x0 = [-0.2 0.3];
t = 0:0.05:8;
u = zeros(length(t),1);
u(t>=2) = 1;
lsim(sys,u,t,x0)
grid on
Первая половина графика показывает свободную эволюцию системы от начальных значений состояния [-0.2 0.3]. В t = 2 на графике показана реакция системы на этот новый сигнал, начиная со значений состояния в это время.
При использовании lsim с выходными аргументами возвращает смоделированные данные ответа в массиве. Для системы SISO данные ответа возвращаются в виде вектора столбца той же длины, что и t. Например, извлекают отклик системы SISO на квадратную волну. Создание квадратной волны с помощью gensig.
sys = tf([2 5 1],[1 2 3]);
[u,t] = gensig("square",4,10,0.05);
[y,t] = lsim(sys,u,t);
size(y)ans = 1×2
201 1
Вектор y содержит смоделированный ответ на каждом временном шаге в t. (lsim возвращает вектор времени t для удобства.)
Для системы MIMO ответные данные возвращаются в массиве измерений N-by-Ny-by-Nu, где Ny и Nu - количество выходов и входов динамической системы. Например, рассмотрим следующую модель состояния-пространства, представляющую систему с тремя состояниями с двумя входами и тремя выходами.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.1 -0.2;
0.7 -0.2 -0.3
-0.65 0 -0.6];
D = [ 0.1 0;
0.1 1.5
0 0];
sys = ss(A,B,C,D);Извлеките отклики трех выходных каналов на квадратную волну, применяемую на обоих входах.
uM = [u u]; [y,t] = lsim(sys,uM,t); size(y)
ans = 1×2
201 3
y(:,j) - вектор столбца, содержащий отклик на выходе j на квадратную волну, применяемую к обоим входам. То есть y(i,:) - вектор из трех значений, выходные значения на i-м временном шаге.
Поскольку sys является моделью состояния-пространства, можно извлечь эволюцию во времени значений состояния в ответ на входной сигнал.
[y,t,x] = lsim(sys,uM,t); size(x)
ans = 1×2
201 3
Каждая строка x содержит значения состояния [x1,x2,x3] в соответствующее время в t. Другими словами, x(i,:) - вектор состояния на i-м временном шаге. Постройте график значений состояния.
plot(t,x)

В примере «График ответа нескольких систем на один и тот же вход» показано, как построить график ответов нескольких отдельных систем на одной оси. Если в массиве модели расположено несколько динамических систем, lsim строит графики всех их ответов сразу.
Создайте массив модели. В этом примере используется одномерный массив передаточных функций второго порядка, имеющих различные собственные частоты. Сначала необходимо предварительно выделить память для массива модели. Следующая команда создает строку 1 на 5 функций передачи SISO с нулевым коэффициентом усиления. Первые два размера представляют выходные и входные данные модели. Остальные размеры - это размеры массива. (Дополнительные сведения о массивах моделей и их создании см. в разделе Массивы моделей (панель инструментов системы управления).)
sys = tf(zeros(1,1,1,5));
Заполните массив.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
Постройте график откликов всех моделей в массиве на вход прямоугольной волны.
[u,t] = gensig("square",5,15);
lsim(sys,u,t)
lsim использует один и тот же стиль строки для ответов всех записей в массиве. Одним из способов различить записи является использование SamplingGrid свойство динамических моделей системы для связывания каждой записи в массиве с соответствующей w0 значение.
sys.SamplingGrid = struct('frequency',w0);Теперь при построении графика откликов в окне фигуры MATLAB можно щелкнуть трассировку, чтобы увидеть, какому значению частоты она соответствует.
Данные оценки нагрузки для оценки модели.
load(fullfile(matlabroot,'toolbox','ident','iddemos','data','dcmotordata')); z = iddata(y,u,0.1,'Name','DC-motor');
z является iddata объект, который хранит данные оценки с одним входом и двумя выходами с временем выборки 0,1 с.
Оценка модели состояния-пространства порядка 4 с использованием данных оценки z.
[sys,x0] = n4sid(z,4);
sys - расчетная модель и x0 - предполагаемые начальные состояния.
Моделирование реакции sys используют те же входные данные, что и данные, используемые для оценки, и исходные состояния, возвращаемые командой оценки.
[y,t,x] = lsim(sys,z.InputData,[],x0);
Здесь, y - ответ системы, t вектор времени, используемый для моделирования, и x - траектория состояния.
Сравнение смоделированного ответа y на измеренный отклик z.OutputData для обоих выходов.
subplot(211), plot(t,z.OutputData(:,1),'k',t,y(:,1),'r') legend('Measured','Simulated') subplot(212), plot(t,z.OutputData(:,2),'k',t,y(:,2),'r') legend('Measured','Simulated')

Выбор времени выборки может резко повлиять на результаты моделирования. Для иллюстрации причин рассмотрим следующую модель второго порядка.
62.83.
Смоделировать отклик этой модели на квадратную волну с периодом 1 с, используя время выборки 0,1 с.
w2 = 62.83^2;
sys = tf(w2,[1 2 w2]);
tau = 1;
Tf = 5;
Ts = 0.1;
[u,t] = gensig("square",tau,Tf,Ts);
lsim(sys,u,t)
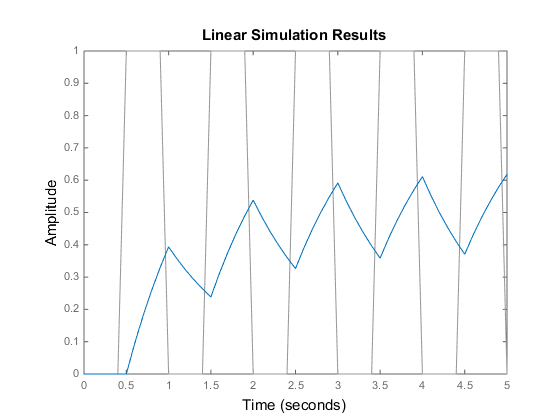
lsim моделирует модель с использованием указанного входного сигнала, но выдает предупреждение о том, что входной сигнал недостаточно дискретизирован. lsim рекомендует время выборки, которое генерирует не менее 64 выборок за период ввода u. Чтобы понять, почему эта рекомендация имеет значение, смоделируйте sys снова с использованием времени выборки, меньшего рекомендуемого максимума.
figure
Ts2 = 0.01;
[u2,t2] = gensig("square",tau,Tf,Ts2);
lsim(sys,u2,t2)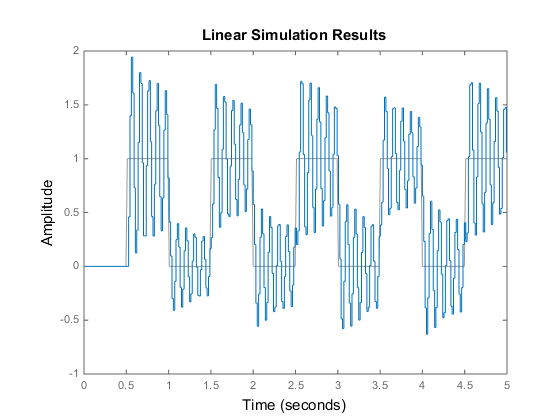
Этот ответ демонстрирует сильное колебательное поведение, которое скрыто в недостаточно дискретизированной версии.
Если требуются дополнительные параметры настройки печати, используйте lsimplot вместо этого.
Для функции передачи дискретного времени
n1 + b1z − 1 +... + bnz − n,
lsim фильтрует входные данные на основе рекурсии, связанной с этой передаточной функцией:
k − 1] −... − bn [k − n].
Для дискретного времени zpk модели, lsim фильтрует входные данные через ряд секций первого или второго порядка. Такой подход позволяет избежать формирования многочленов числителя и знаменателя, что может вызвать числовую нестабильность для моделей более высокого порядка.
Для дискретно-временных моделей состояния и пространства, lsim распространяет дискретно-временные уравнения состояния-пространства,
Cx [n] + Du [n].
Для систем непрерывного времени, lsim сначала дискретизирует систему с помощью c2d, а затем распространяет результирующие дискретно-временные уравнения состояния-пространства. Если не указано иное с помощью method входной аргумент, lsim использует способ дискретизации с удержанием первого порядка, когда входной сигнал является плавным, и удержание нулевого порядка, когда входной сигнал является прерывистым, например, для импульсов или прямоугольных волн. Время дискретизации выборки - это интервал dT между временными пробами, которые вы поставляете в t.
impulse | lsiminfo | lsimplot | sim | step | gensig (Панель инструментов системы управления) | initial(Панель инструментов системы управления)