Моделирование ответа идентифицированной модели
sim(___) строит график смоделированного отклика идентифицированной модели.
Загрузите оценочные данные.
load iddata2 z2
Оценка модели пространства состояния третьего порядка.
sys = ssest(z2,3);
Моделирование идентифицированной модели с использованием входных каналов из данных оценки.
y = sim(sys,z2);
Загрузите данные и получите идентифицированную модель.
load iddata2 z2 sys = n4sid(z2,3);
sys - модель состояния-пространства третьего порядка, оцененная методом подпространства.
Создайте набор опций моделирования, чтобы добавить шум к отклику моделируемой модели.
opt1 = simOptions('AddNoise',true);Моделирование модели.
y = sim(sys,z2,opt1);
По умолчанию гауссовский белый шум фильтруется функцией передачи шума модели и добавляется к отклику моделируемой модели.
Также можно добавить собственный шумовой сигнал, e, с использованием NoiseData вариант.
e = randn(length(z2.u),1); opt2 = simOptions('AddNoise',true,'NoiseData',e);
Моделирование модели.
y = sim(sys,z2,opt2);
Загрузить данные.
load iddata1 z1
Укажите опцию оценки для оценки начального состояния.
estimOpt = ssestOptions('InitialState','estimate');
Оцените модель «состояние-пространство» и верните значение расчетного начального состояния.
[sys,x0] = ssest(z1,2,estimOpt);
Укажите исходные условия для моделирования
simOpt = simOptions('InitialCondition',x0);Смоделировать модель и получить отклик модели и стандартное отклонение.
[y,y_sd] = sim(sys,z1,simOpt);
Загрузить данные оценки и оценить модель состояния-пространства.
load iddata1 z1 sys = ssest(z1,2);
Верните стандартное отклонение и траекторию состояния.
[y,y_sd,x] = sim(sys,z1);
Загрузить данные оценки и оценить модель состояния-пространства.
load iddata1 z1 sys = ssest(z1,2);
Создайте набор опций моделирования и укажите начальные состояния.
opt = simOptions('InitialCondition',[1;2]);Укажите ковариацию начальных состояний.
opt.X0Covariance = [0.1 0; 0 0.1];
Рассчитать стандартные отклонения смоделированной реакции, y_sdи траектория состояния, x_sd.
[y,y_sd,x,x_sd] = sim(sys,z1,opt);
Получение идентифицированной модели.
load iddata2 z2 sys = tfest(z2,3);
sys является idtf модель, которая инкапсулирует функцию переноса третьего порядка, оцененную для измеренных данных z2.
Моделирование модели.
sim(sys,z2)

Моделирование одновходовой нелинейной модели ARX вокруг известной точки равновесия с входным уровнем 1 и уровень выпуска 10.
Загрузите образцы данных.
load iddata2Оцените нелинейную модель ARX на основе данных.
M = nlarx(z2,[2 2 1],'treepartition');Оценка текущего состояния модели на основе прошлых данных. Укажите столько прошлых выборок, сколько имеется лагов во входных и выходных переменных (2 здесь).
x0 = data2state(M,struct('Input',ones(2,1),'Output',10*ones(2,1)));
Моделирование модели с использованием начальных состояний, возвращаемых data2state.
opt = simOptions('InitialCondition',x0);
sim(M,z2,opt)
Продолжите моделирование нелинейной модели ARX с конца предыдущего прогона моделирования.
Оцените нелинейную модель ARX на основе данных.
load iddata2 M = nlarx(z2,[2 2 1],'treepartition');
Моделирование модели с использованием первой половины входных данных z2. Начните моделирование с нулевых начальных состояний.
u1 = z2(1:200,[]); opt1 = simOptions('InitialCondition','zero'); ys1 = sim(M,u1,opt1);
Запуск другого моделирования с использованием второй половины входных данных z2. Используйте те же состояния модели, что и в конце первого моделирования.
u2 = z2(201:end,[]);
Чтобы правильно установить начальные состояния для второго моделирования, введите пакет u1 и выходные данные ys1 из первого моделирования в одно iddata объект. Передайте эти данные в качестве начальных условий для следующего моделирования.
firstSimData = [ys1,u1];
opt2 = simOptions('InitialCondition',firstSimData);
ys2 = sim(M,u2,opt2);Проверка двух моделей путем сравнения с полным моделированием с использованием всех входных данных z2. Сначала извлеките весь набор входных данных.
uTotal = z2(:,[]); opt3 = simOptions('InitialCondition','zero'); ysTotal = sim(M,uTotal,opt3);
Постройте график трех ответов ys1, ys2 и ysTotal. ys1 должно быть равно первой половине ysTotal. ys2 должно быть равно второй половине ysTotal.
plot(ys1,'b',ys2,'g',ysTotal,'k*')

На графике видно, что три ответа ys1, ys2, и ysTotal перекрытие, как и ожидалось.
Оценка начальных состояний модели M таким образом, ответ лучше всего соответствует выходному сигналу в наборе данных z2.
Загрузите образцы данных.
load iddata2;Оцените нелинейную модель ARX на основе данных.
M = nlarx(z2,[4 3 2],wavenet('NumberOfUnits',20));Оценка начальных состояний M для наилучшего вписывания z2.y в смоделированном ответе.
x0 = findstates(M,z2,Inf);
Моделирование модели.
opt = simOptions('InitialCondition',x0);
ysim = sim(M,z2.u,opt);Сравнение выходных данных моделируемой модели ysim с выходным сигналом в z2.
time = z2.SamplingInstants;
plot(time,ysim,time,z2.y,'.')
Начало моделирования модели в установившемся состоянии, где известно, что входной сигнал 1, но выход неизвестен.
Загрузите образцы данных.
load iddata2Оцените нелинейную модель ARX на основе данных.
M = nlarx(z2,[4 3 2],'wavenet');Определение значений состояния равновесия для ввода 1 и неизвестные целевые выходные данные.
x0 = findop(M,'steady',1, NaN);Моделирование модели с использованием начальных состояний x0.
opt = simOptions('InitialCondition',x0);
sim(M,z2.u,opt)
Загрузите образцы данных.
load iddata2Создайте модель Хаммерштейна-Винера.
M = nlhw(z2,[4 3 2],[],'pwlinear');Вычисление значений установившейся рабочей точки, соответствующих входному уровню 1 и неизвестный уровень вывода.
x0 = findop(M,'steady',1,NaN);Моделирование модели с использованием расчетных начальных состояний.
opt = simOptions('InitialCondition',x0);
sim(M,z2.u)
Загрузка данных временных рядов и оценка модели AR с использованием метода наименьших квадратов.
load iddata9 z9 sys = ar(z9,6,'ls');
Для данных временных рядов укажите требуемую длину моделирования N = 200, используя N-by-0 набор входных данных.
data = iddata([],zeros(200,0),z9.Ts);
Установите начальные условия для использования начальных выборок временного ряда в качестве выборок исторических выходных данных.
IC = struct('Input',[],'Output',z9.y(1:6)); opt = simOptions('InitialCondition',IC);
Моделирование модели.
sim(sys,data,opt)

Используйте исторические данные ввода-вывода в качестве прокси для начальных условий при моделировании модели. Сначала необходимо смоделировать с помощью sim и укажите исторические данные с помощью simOptions набор опций. Затем смоделированные выходные данные воспроизводятся путем сопоставления исторических данных с начальными состояниями вручную.
Загрузите набор данных с двумя входами и одним выходом.
load iddata7 z7
Определение модели пространства состояния пятого порядка с использованием данных.
sys = n4sid(z7,5);
Разбейте набор данных на две части.
zA = z7(1:15); zB = z7(16:end);
Моделирование модели с использованием входного сигнала в zB.
uSim = zB;
Для моделирования требуются начальные условия. Значения сигнала в zA являются историческими данными, то есть они являются входными и выходными значениями для времени, непосредственно предшествующего данным в zB. Использовать zA в качестве прокси для требуемых начальных условий.
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = simOptions('InitialCondition',IO);
Моделирование модели.
ysim = sim(sys,uSim,opt);
Теперь воспроизведите выходные данные, вручную сопоставив исторические данные начальным состояниям sys. Для этого используйте data2state команда.
xf = data2state(sys,zA);
xf содержит значения состояния sys в момент непосредственно после последней выборки данных в zA.
Моделирование системы с помощью xf в качестве начальных состояний.
opt2 = simOptions('InitialCondition',xf);
ysim2 = sim(sys,uSim,opt2);Постройте график выходных данных sim команда ysim и вычисленные вручную результаты ysim2.
plot(ysim,'b',ysim2,'--r')

ysim2 является таким же, как ysim.
Когда исходные условия оцененной модели и системы, которая измеряла набор данных проверки, различны, смоделированные и измеренные ответы также могут отличаться, особенно в начале ответа. Чтобы минимизировать эту разницу, оцените начальные значения состояния с помощью findstates и используйте оценочные значения для установки InitialCondition опция с использованием simOptions. Пример см. в разделе Сопоставление ответа модели с выходными данными.
Моделирование означает вычисление отклика модели с использованием входных данных и исходных условий. sim моделирует следующую систему:
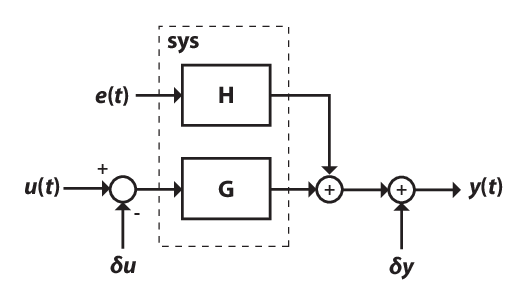
Здесь,
u (t) - входные данные моделирования ,udata.
y (t) - смоделированный выходной отклик.
G - передаточная функция от входа к выходу и определяется в sys. Исходные условия моделирования, указанные с помощью simOptions, установить исходное состояние G.
e (t) является необязательным шумовым сигналом. Добавление шума в моделирование путем создания simOptions набор опций и установка AddNoise опция для true. Кроме того, можно изменить шумовой сигнал по умолчанию, указав NoiseData вариант.
H является функцией передачи шума и определяется в sys.
δu - необязательный входной сдвиг, вычитаемый из входного сигнала u (t) до того, как вход будет использован для моделирования модели. Задайте смещение ввода, задав значение InputOffset опция с использованием simOptions.
δy - необязательный выходной сдвиг, добавляемый к выходному отклику y (t) после моделирования. Задайте смещение вывода, задав значениеOutputOffset опция с использованием simOptions.
Дополнительные сведения о задании начальных условий моделирования, входных и выходных смещений и данных шумового сигнала см. в разделе simOptions. Для многоэкспериментных данных можно задать эти опции отдельно для каждого эксперимента.
Использовать simsd для метода Монте-Карло вычисления стандартного отклонения отклика.
sim простирается lsim для облегчения дополнительных функций, относящихся к определенным моделям:
Моделирование нелинейных моделей
Моделирование с аддитивным шумом
Включение смещений сигналов
Вычисление стандартного отклонения отклика (только линейные модели)
Моделирование частотной области (только линейные модели)
Моделирование с использованием различных методов интерсамплирования для различных входных данных
Чтобы получить смоделированный ответ без какой-либо из предыдущих операций, используйте lsim.
compare | findstates | forecast | idinput | lsim | predict | simOptions | simsd | step
