Автоматическая и последовательная настройка нескольких контуров управления PID в полевых приложениях управления
Блок управления двигателем/элементы управления/контроллеры
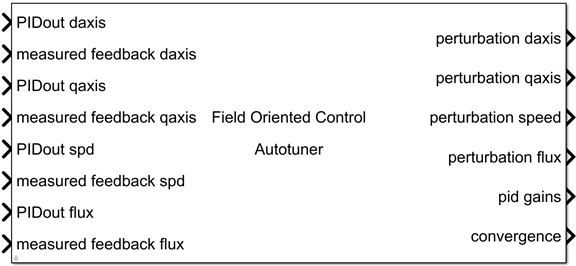
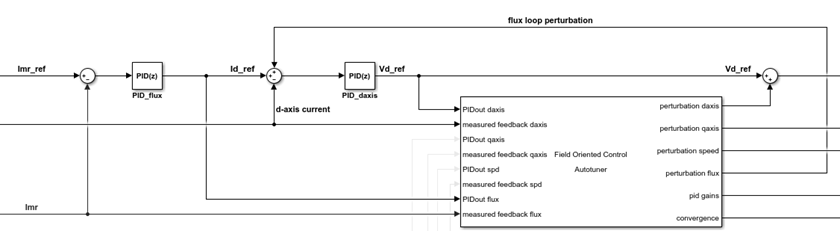
Блок Autotuner Field Oriented Control позволяет автоматически настраивать контуры управления PID в приложении field-oriented control (FOC) в режиме реального времени. Дополнительные сведения об управлении, ориентированном на поле, см. в разделе Управление, ориентированное на поле (FOC).
Можно автоматически настроить контроллеры PID, связанные со следующими контурами:
Контур тока прямой оси (d-оси)
Контур тока квадратурной оси (оси q)
Петля скорости
Контур потока
Для каждого цикла, который настраивает блок, блок Autotuner, ориентированный на поле, выполняет эксперимент по автоматическому запуску в замкнутом цикле без параметрической модели, связанной с этим циклом. Блок позволяет задать порядок настройки контуров управления. Когда эксперимент настройки выполняется для одного цикла, блок не влияет на другие циклы. Во время эксперимента блок:
Ввод тестового сигнала в установку, связанную с этим контуром, для сбора входных-выходных данных установки и оценки частотной характеристики в реальном времени. Тестовый сигнал представляет собой комбинацию синусоидальных сигналов возмущения, добавленных на вход установки.
В конце эксперимента настраивают параметры ПИД-контроллера на основе оцененных частотных характеристик установки вблизи целевой полосы пропускания.
Запись обновленных коэффициентов усиления PID на выходе блока, что позволяет передавать новые коэффициенты усиления существующим контроллерам и проверять производительность по замкнутому циклу.
Для настройки существующих ПИД-контроллеров в структуре ВОК можно использовать блок Autotuner Field Oriented Control. Если у вас нет исходных ПИД-контроллеров, для их получения можно использовать рабочий процесс «Оценка контрольных выигрышей от параметров двигателя». Затем можно использовать блок Autotuner с ориентацией на поле для уточнения или повторного выполнения.
Если у вас есть продукт для генерации кода, такой как Simulink ® Coder™, вы можете создать код, который реализует алгоритм настройки на оборудовании, позволяя настраиваться в режиме реального времени, используя или не используя Simulink для управления процессом автотюнинга.
Если имеется машина, смоделированная в Simulink с Blockset™ управления двигателем, и начальная структура ВОК с контроллерами PID, можно выполнить автоматическую обработку PID с замкнутым контуром в отношении смоделированной машины. Это позволяет просмотреть отклик завода и настроить настройки для автоматического запуска PID перед настройкой контроллера в режиме реального времени.
Блок поддерживает создание кода с помощью Simulink Coder, Embedded Coder ® и Simulink PLC Coder™. Он не поддерживает генерацию кода с помощью HDL Coder™. Для приложений реального времени следует развернуть созданный код на аппаратном обеспечении быстрого прототипирования, таком как целевая машина реального времени Speedgoat.
Дополнительные сведения об использовании блока Autotuner элемента управления с ориентацией по полю см. в разделе Как использовать блок Autotuner элемента управления с ориентацией по полю.
Для этого блока требуется программное обеспечение Simulink Control Design™.
PIDout_daxis - Сигнал от контроллера постоянного тока Этот порт принимает выходные данные контроллера d-оси PID_daxis, который является выходом контроллера PID, который регулирует ток d-оси двигателя. Контроллер генерирует эталонное напряжение по оси d Vd_ref, в то время как блок автотюнера ВОК генерирует возмущения, используемые во время эксперимента настройки для контура тока d-оси.
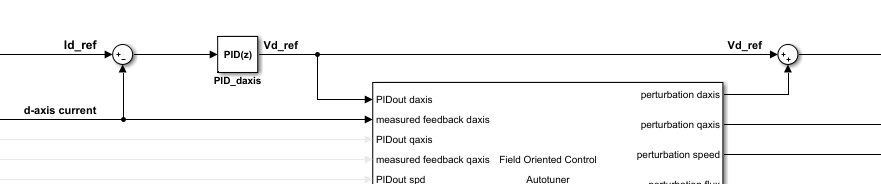
Чтобы включить этот порт, выберите Tune D-axis current loop.
Типы данных: single | double
measured feedback_daxis - Измеренный постоянный ток Этот порт принимает ток по оси d, полученный из измеренных (измеренных или оцененных) токов двигателя.
Чтобы включить этот порт, выберите Tune D-axis current loop.
Типы данных: single | double
PIDout_qaxis - Сигнал от квадратурного регулятора тока Этот порт принимает выходные данные контроллера оси q PID_qaxis, который является выходом контроллера PID, который регулирует ток по оси q двигателя. Контроллер генерирует эталонное напряжение по оси q Vq_refв то время как блок автотюнера ВОК генерирует возмущения, используемые во время эксперимента настройки для контура тока по оси q.
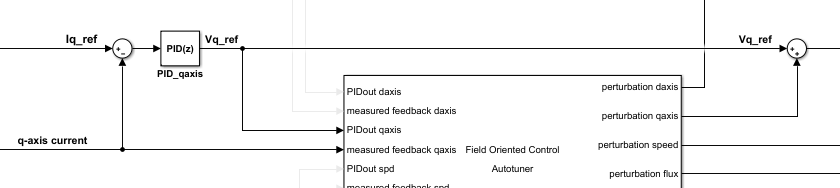
Чтобы включить этот порт, выберите Tune Q-axis current loop.
Типы данных: single | double
measured feedback_qaxis - Измеренный квадратурный токЭтот порт принимает ток по оси q, полученный из измеренных (измеренных или оцененных) токов двигателя.
Чтобы включить этот порт, выберите Tune Q-axis current loop.
Типы данных: single | double
PIDout_spd - Сигнал от регулятора скорости Этот порт принимает выходные данные контроллера скорости PID_speed, который является выходом контроллера PID, который регулирует скорость двигателя. Контроллер генерирует эталон тока по оси q Iq_ref, в то время как блок автотюнера ВОК генерирует возмущения, используемые во время эксперимента настройки для цикла скорости.
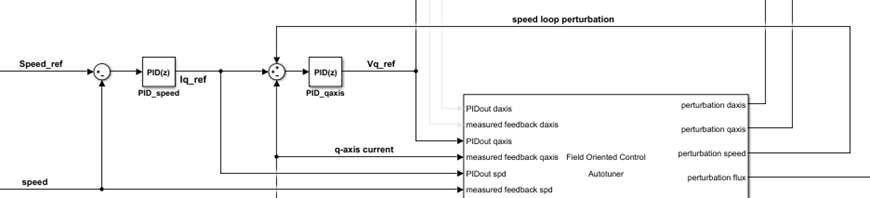
Чтобы включить этот порт, выберите Tune speed loop.
Типы данных: single | double
measured feedback_spd - Измеренная скоростьЭтот порт принимает измеренную (измеренную или оцененную) скорость от двигателя.
Чтобы включить этот порт, выберите Tune speed loop.
Типы данных: single | double
PIDout_flux - Сигнал от регулятора потока Этот порт принимает выходной сигнал контроллера потока PID_flux, который является выходом контроллера PID, который регулирует поток двигателя. Контроллер генерирует эталон тока по оси d Id_ref, в то время как блок автотюнера ВОК генерирует возмущения, используемые во время эксперимента настройки для контура потока.
Для синхронного двигателя с постоянным магнитом (PMSM) контроллер контура потока отсутствует, так как поток ротора зафиксирован и Id_ref имеет нулевое значение. В некоторых приложениях можно указать отрицательное значение Id_ref ценность для осуществления управления ослаблением поля и достижения более высоких скоростей ротора при стоимости более высокого тока.
Чтобы включить этот порт, выберите Tune flux loop.
Типы данных: single | double
measured feedback_flux - Измеренный потокЭтот порт принимает измеренный (измеренный или расчетный) поток от двигателя.
Чтобы включить этот порт, выберите Tune flux loop.
Типы данных: single | double
start/stop - Запуск и остановка эксперимента по автоматическому запускуДля внешнего запуска и остановки процесса автозапуска необходимо подать сигнал на start/stop порт и ActiveLoop порт.
Эксперимент начинается, когда значение сигнала изменяется с отрицательного или нулевого на положительное.
Эксперимент прекращается, когда значение сигнала изменяется с положительного на отрицательное или нулевое.
В течение эксперимента для каждого контура блок впрыскивает синусоидальные возмущения на вход установки, связанный с контуром, вблизи номинальной рабочей точки для сбора данных ввода-вывода и оценки частотной характеристики. Когда эксперимент прекращается, блок вычисляет коэффициенты усиления PID на основе частотных характеристик установки, оцененных вблизи целевой полосы пропускания.
Когда эксперимент не выполняется, блок не вводит никаких возмущений на входах установки. В этом состоянии блок не влияет на поведение установки или контроллера.
Обычно можно использовать сигнал, который изменяется с 0 на 1, чтобы начать эксперимент, и с 1 на 0, чтобы остановить его. При настройке start/stop сигнал.
Запустите эксперимент, когда двигатель находится в требуемой рабочей точке равновесия. Используйте начальный контроллер для приведения двигателя в рабочее положение.
Избегайте каких-либо нарушений на входе или выходе двигателя во время эксперимента. Если существующая система с замкнутым контуром имеет хорошее отклонение возмущений, то эксперимент может справиться с небольшими возмущениями. В противном случае большие возмущения могут исказить производительность установки и снизить точность оценки частотного отклика.
Пусть эксперимент работает достаточно долго, чтобы алгоритм собрал достаточные данные для хорошей оценки на всех частотах, которые он зондирует. Есть два способа определить, когда остановить эксперимент:
Заранее определите продолжительность эксперимента. Консервативная оценка продолжительности эксперимента составляет 200/λ c, где startc - целевая полоса пропускания.
Наблюдайте за сигналом на convergence и прекратить эксперимент, когда сигнал стабилизируется около 100%.
Когда вы останавливаете эксперимент, блок вычисляет настроенные коэффициенты усиления PID и обновляет сигнал в pid gains порт.
Вы можете настроить любую логику, подходящую для вашего приложения, чтобы контролировать время начала и окончания эксперимента. start/stop сигнал указывается вместе с ActiveLoop. ActiveLoop принимает целочисленные значения от 1 до 4 и указывает, какой цикл нужно настроить.
Кроме того, при настройке в режиме моделирования или во внешнем режиме можно указать последовательность эксперимента настройки, время начала и длительность в параметрах блока.
Чтобы включить этот порт, на вкладке Блок (Block) в разделе Источник параметров (Parameters Source) выберите Использовать внешний источник (Use external source for start/stop of experiment).
Типы данных: single | double
ActiveLoop - Укажите активный цикл для эксперимента по автоматическому запуску Установите ActiveLoop значение для указания цикла настройки при предоставлении внешнего источника для времени начала и окончания эксперимента настройки.
ActiveLoop Стоимость | Закольцовывание для настройки |
|---|---|
1 | D-axis токовый контур |
2 | Q-axis токовый контур |
3 | Speed петля |
4 | Flux петля |
Вы можете настроить любую логику, подходящую для вашего приложения вместе с start/stop порт для управления последовательностью и временем, в которое выполняется эксперимент по настройке цикла. ActiveLoop принимает целочисленные значения от 1 до 4 и указывает, какой цикл нужно настроить. Любое другое число не приведет к настройке независимо от start/stop сигнал. Например, при вводе постоянного значения 2 в ActiveLoop и сигнал при start/stop поднимается, блок начинает эксперимент по настройке для контура тока по оси q.
Кроме того, в параметрах блока можно указать последовательность эксперимента настройки, время начала и длительность.
Чтобы включить этот порт, на вкладке Блок (Block) в разделе Источник параметров (Parameters Source) выберите Использовать внешний источник (Use external source for start/stop of experiment).
Типы данных: single | double
bandwidth - Целевая полоса пропускания для настройкиВведите значения для Target bandwidth (rad/sec) параметр для каждого настраиваемого цикла. При настройке нескольких контуров можно указать полосу пропускания в виде вектора или шины, значения которой соответствуют целевой полосе пропускания для контуров в следующем порядке:
Контур тока по оси D
Контур тока по оси Q
Петля скорости
Контур потока
Векторный сигнал должен быть указан как N-by-1 или 1-by-N сигнал или, если указан как шина, должен иметь N элементов, где N - количество петель, подлежащих настройке. Например, если вы настраиваете цикл тока по оси q и цикл скорости, и вы указываете вектор [5000, 200] на этом порту, блок настраивает контроллер тока по оси q с целевой полосой пропускания 5000 рад/сек и контроллер цикла скорости с целевой полосой пропускания 200 рад/сек.
Если вы настраиваете несколько циклов и указываете скалярное значение на этом порте, то блок использует одну и ту же целевую полосу пропускания для настройки всех контроллеров. Для эффективного каскадного управления внутренние контуры управления (d-оси и q-оси) должны реагировать гораздо быстрее, чем внешние контуры управления (поток и скорость). Поэтому при настройке нескольких контуров необходимо указать целевую полосу пропускания в виде векторного или шинного сигнала.
В качестве альтернативы можно указать целевую полосу пропускания для отдельных циклов в параметрах блока. Дополнительные сведения о выборе полосы пропускания см. в описании этого параметра.
Чтобы включить этот порт, на вкладке Block в разделе Parameters Source выберите Use external source for bandwidth.
Типы данных: single | double
target PM - Целевой запас фазы для настройкиВведите значение для Target phase margin (degrees) параметр для каждого настраиваемого цикла. При настройке нескольких циклов можно указать target PM в виде вектора или шины, записи которых соответствуют целевому диапазону фаз для петель в следующем порядке:
Контур тока по оси D
Контур тока по оси Q
Петля скорости
Контур потока
Векторный сигнал должен быть указан как N-by-1 или 1-by-N сигнал или, если указан как шина, должен иметь N элементов, где N - количество петель, подлежащих настройке. Например, если вы настраиваете контур тока по оси q и контур скорости, и вы указываете вектор [60, 45] на этом порте, блок настраивает контроллер тока по оси q с целевым запасом фазы 60 градусов и контроллер контура скорости с целевым запасом фазы 45 градусов.
Если вы настраиваете несколько циклов и указываете скалярное значение на этом порте, то блок использует один и тот же целевой запас фазы для настройки всех контроллеров.
В качестве альтернативы можно задать целевой запас фазы для отдельных контуров в параметрах блока. Дополнительные сведения о выборе целевого поля фазы см. в описании этого параметра.
Чтобы включить этот порт, на вкладке Block в разделе Parameters Source выберите Use external source for target phase margin.
Типы данных: single | double
sine Amp - Амплитуды вводимых синусоидальных сигналов возмущенияВведите значение для Sine Amplitudes параметр для каждого настраиваемого цикла. Укажите одно из следующих значений:
Вектор длины 5 для задания различной амплитуды при каждом из [1/10, 1/3, 1, 3, 10] , где startc - целевая полоса пропускания для настройки.
N-by-5 матрица, где N - количество настраиваемых циклов. Каждая запись строки должна иметь длину 5, чтобы задать различную амплитуду в [1/10, 1/3, 1, 3, 10] .
Если вы настраиваете несколько контуров и задаете вектор длиной 5 на этом порте, то блок использует заданную амплитуду для всех контуров в каждом из [1/10, 1/3, 1, 3, 10] соответствует этому циклу.
В качестве альтернативы можно задать амплитуду синусоидального возмущения для отдельных контуров в параметрах блока. Дополнительные сведения см. в описании параметра.
Чтобы включить этот порт, на вкладке Block в разделе Parameters Source выберите Use external source for sine amplitudes.
Типы данных: single | double
Дискретный контроллер PI с защитой от обмотки и сбросом | Ограничитель DQ | Обратное преобразование парков | Преобразование парка | Измерение скорости


