Осуществить преобразование dq в αβ
Блок управления двигателем/элементы управления/математические преобразования
Блок обратного преобразования парков вычисляет обратное преобразование парков ортогональных компонентов прямой и квадратурной осей в вращающемся опорном кадре dq. Можно настроить блок для выравнивания оси d- или q с осью α в момент времени t = 0.
Блок принимает следующие входные данные:
Компоненты осей d-q во вращающейся опорной системе координат.
Синусоидальные и косинусные значения соответствующих углов преобразования.
Он выводит двухфазные ортогональные компоненты в стационарном αβ опорном кадре.
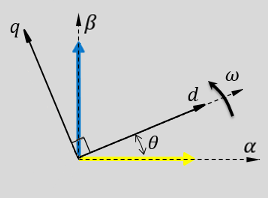
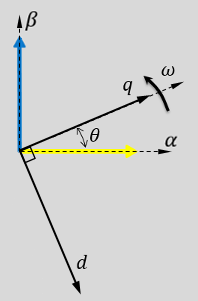
На чертежах показана вращающаяся опорная система dq и компоненты α-β осей в α β-системе координат, когда:
Ось d выравнивается по оси α.
Ось q выравнивается с осью α.
В обоих случаях угол
λ - угол между α- и d-осями для выравнивания d-оси или угол между α- и q-осями для выравнивания q-оси. Он указывает угловое положение вращающейся опорной рамки dq относительно α-оси.
λ - скорость вращения опорного кадра d-q.
t - время в секундах от начальной выставки.
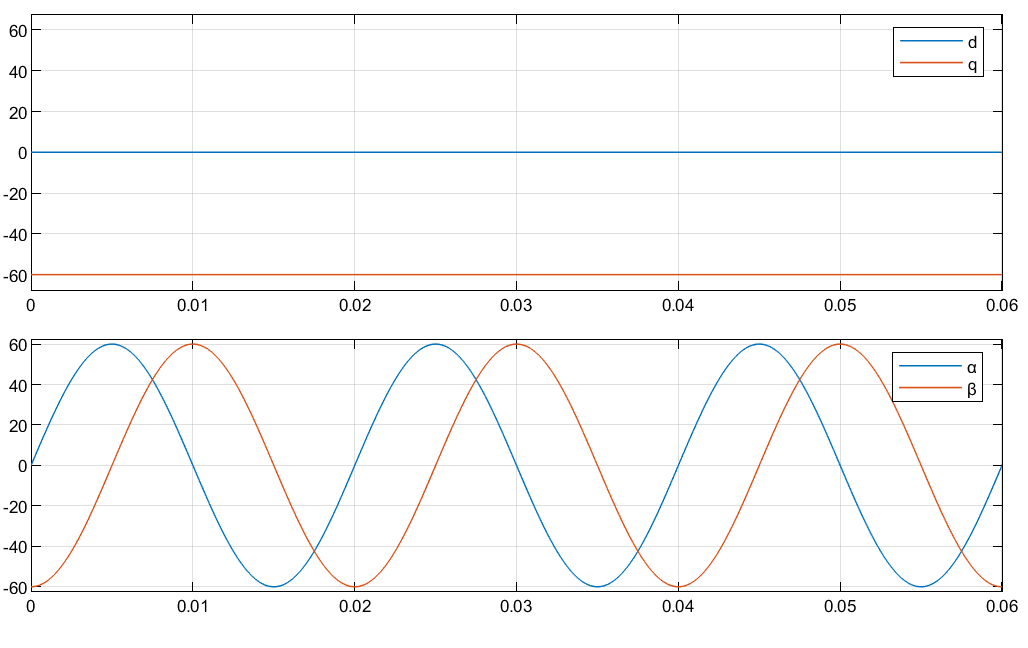
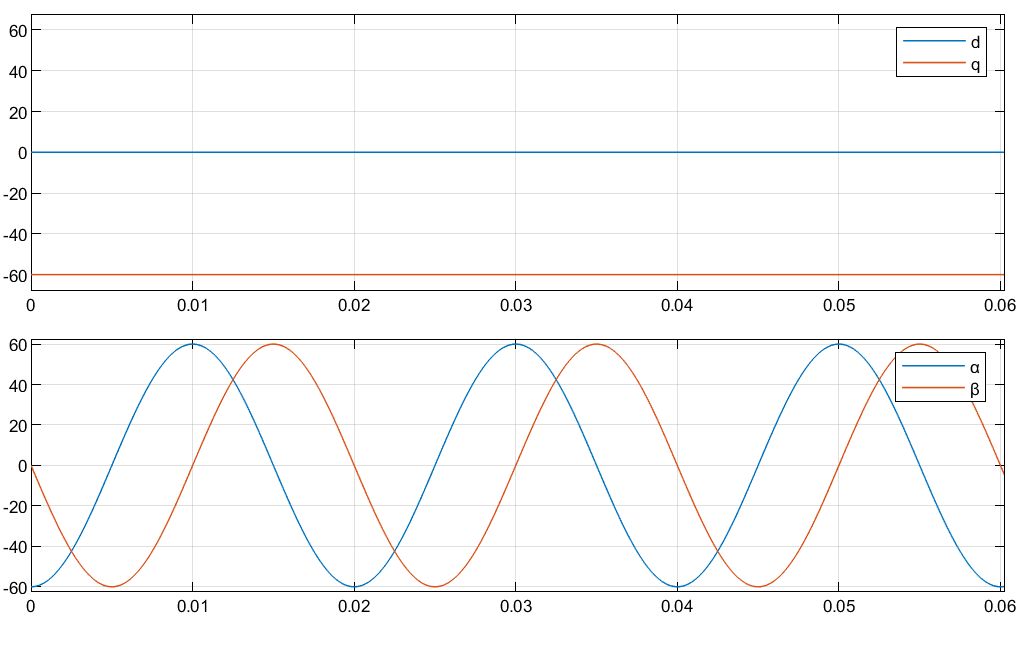
На рисунках показана временная характеристика отдельных компонентов опорных кадров αβ и dq, когда:
Ось d выравнивается по оси α.
Ось q выравнивается с осью α.
Следующие уравнения описывают, как блок реализует обратное преобразование Парка.
Когда ось d выравнивается с осью α.
fdfq]
Когда ось q выравнивается с осью α.
fdfq]
где:
и являются прямыми и квадратурными ортогональными компонентами в вращающейся опорной системе dq.
и - двухфазные ортогональные компоненты в стационарной αβ-системе отсчета.
Управление передачей данных ACIM | Дискретный контроллер PI с защитой от обмотки и сбросом | Ограничитель DQ | Преобразование парка | Управление прямой передачей PMSM | Синусоидальный поиск | Генератор векторов пространства



