Вычислить электрическое положение и механическую частоту вращения ротора
Блок управления двигателем/безсенсорные оценщики
Блок наблюдателя скользящего режима вычисляет электрическое положение и механическую скорость PMSM, используя значения напряжения и тока на единицу по α- и β-осям стационарной αβ-системы отсчета.
Эти уравнения описывают вычисление электрического положения и механической скорости блоком.
− Γ eαβ
− RL]
1L001L]
Эти уравнения описывают работу наблюдателя в дискретно-временном скользящем режиме с использованием значений на единицу измерения:
(k) P.U)
(k) P.U)) −ϑαβ (k) P.U)
eФТ
1Ts
где:
- обратная ЭДС статора и ток для оси α.
- обратная ЭДС статора и ток для оси β.
vβ - напряжения питания статора.
- сопротивление статора.
- индуктивность статора.
- флюсовая связь за счет постоянного магнита.
- электрическая угловая скорость.
- электрическое положение ротора.
- время.
- период выборки.
- количество образцов.
- номинальное напряжение, соответствующее 1 на единицу.
- номинальный ток, соответствующий 1 на единицу.
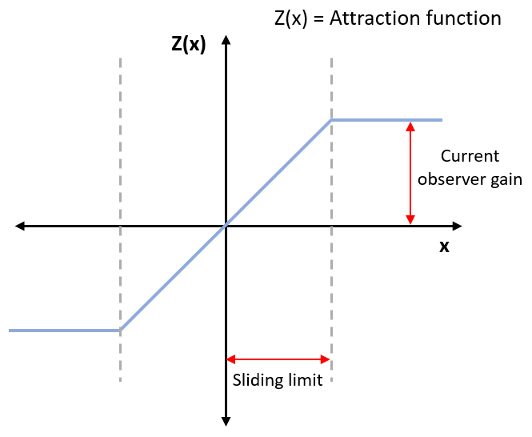
- функция притяжения.
- частота отсечки фильтра в циклах на образец.
- частота отсечки в циклах в секунду.
- частота выборки в выборках в секунду.
) - оценочная обратная ЭДС.
Для настройки блока используйте параметры «Текущий коэффициент усиления наблюдателя» и «Предел скользящей поверхности».
Для повышения стабильности увеличьте предел поверхности скольжения или уменьшите коэффициент усиления текущего наблюдателя.
Чтобы уменьшить искажение, уменьшите коэффициент усиления текущего наблюдателя или увеличьте предел поверхности скольжения.
[1] Y. Kung, N.V. Куинх, Ц. Хуан и Л. Хуан, «Дизайн и моделирование адаптивной регулировки скорости для основанного на SMO двигателя PMSM без датчика», 4-я Международная конференция 2012 года по вопросам Intelligent and Advanced Systems (ICIAS2012), Куала-Лумпур, 2012, стр 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Чжан Янь и В. Уткин, «Наблюдатели скользящего режима для электрических машин - обзор», IEEE 2002 28-я ежегодная конференция Общества промышленной электроники. IECON 02, Севилья, 2002, стр. 1842-1847, том 3. (doi: 10.1109/IECON.2002.1185251)
[3] Т. Бернардес, В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро, «Дискретное время, Двигая Наблюдателя Способа для Векторного Контроля Без датчика Постоянного магнита Синхронная Машина», в Сделках IEEE на Industrial Electronics, издании 61, № 4, стр 1679-1691, апрель 2014 (doi: 10.1109/TIE.2013.2267700)
[4] З. Го и С. К. Панда, «Проектирование наблюдателя скользящего режима для безсенсорного управления SPMSM, работающего на средних и высоких скоростях», Симпозиум IEEE 2015 года по безсенсорному управлению электрическими приводами (SLED), Сидней, Новый Южный Уэльс, 2015, стр. 1-6. (doi: 10.1109/SLED.2015.7339255)
Трансформация Кларка | Дискретный контроллер PI с защитой от обмотки и сбросом | Флюс-наблюдатель | Обратное преобразование парков | Синусоидальный поиск

