На этом шаге выполняется настройка усиления для контроллера тока d-оси и q-оси вручную.
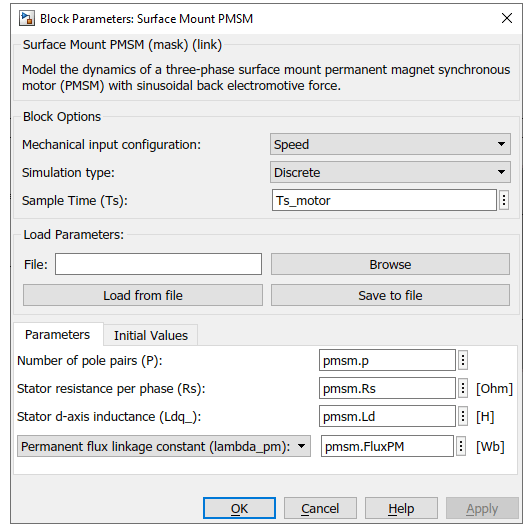
Этот шаг является необязательным, но помогает настроить параметры усиления управления для текущего контроллера. Предоставить изменение шага для Id_ref и проанализировать текущую производительность контроллера из ответа на шаг Id_meas. Повторить тот же процесс для Iq_ref для настройки контроллера тока по оси q. В модели установки заблокируйте ротор, чтобы убедиться, что двигатель не вращается, когда вы предоставляете изменение шага для Id_ref или Iq_ref. В диалоговом окне «Параметры блока PMSM поверхностного монтажа» задайте для параметра конфигурации ввода Mechanical значение Speed. Предоставить вход Spd (блока PMSM поверхностного монтирования) в виде 0 для обеспечения блокировки ротора.
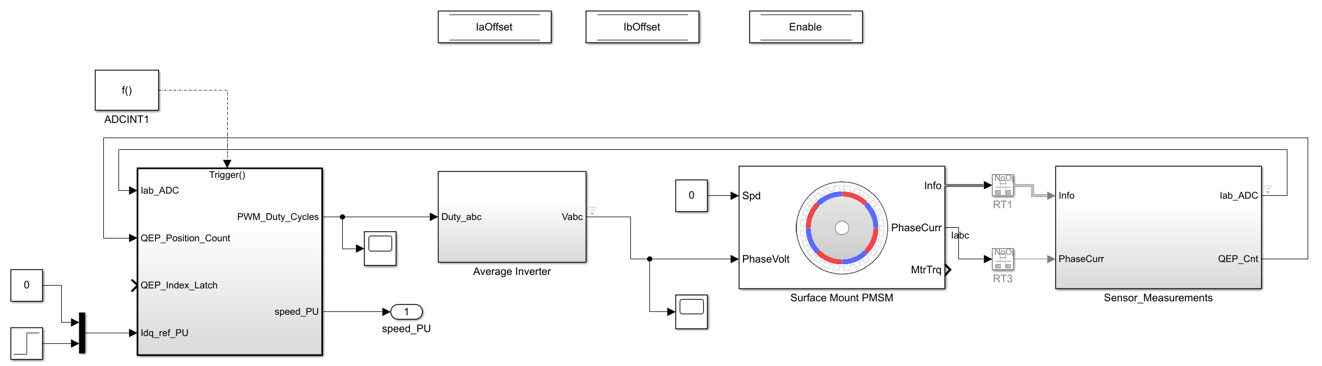
Встроенная модель моделирования подсистемы установки и контроллера позволяет вручную настраивать коэффициенты усиления текущего контроллера. Предоставить ввод шага для Iq_ref в диапазоне (0 кому 0.2) PU и наблюдать измеренную обратную связь. Настройте параметры управления текущего контроллера в соответствии с заданными задачами управления.
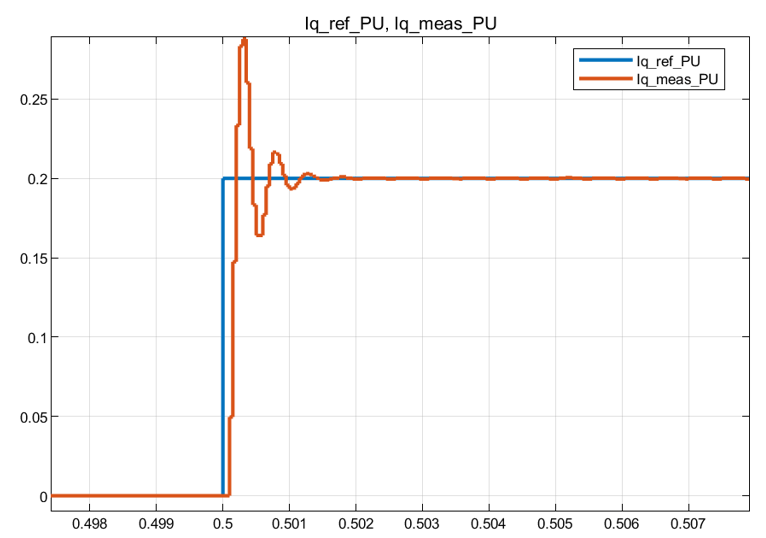
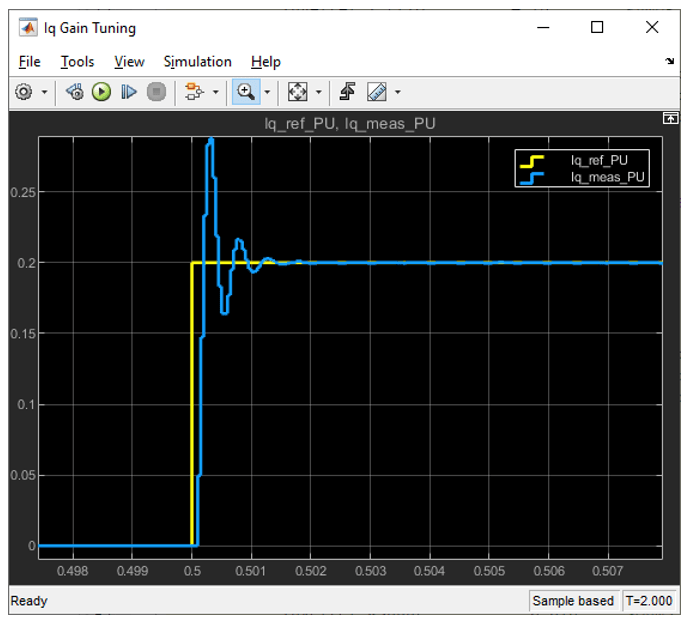
Моделирование модели и печать Iq_ref_PU и Iq_meas_PU и анализ ответа на шаг. Это позволяет настраивать параметры управления для контроллера оси q для достижения целей управления.
Можно использовать тот же метод настройки контроллера тока d-оси. В диалоговом окне «Параметры блока PMSM поверхностного монтажа» задайте для параметра конфигурации ввода Mechanical значение Torque.
