Выполните следующие действия для проектирования текущей подсистемы контроллера:
В библиотеке Motor Control Blockset™ в браузере библиотеки Simulink ® используйте дискретный PI-контроллер с блоком защиты от намотки и сброса (в библиотеке Controls/Controllers) для проектирования управления током по d-оси и q-оси.
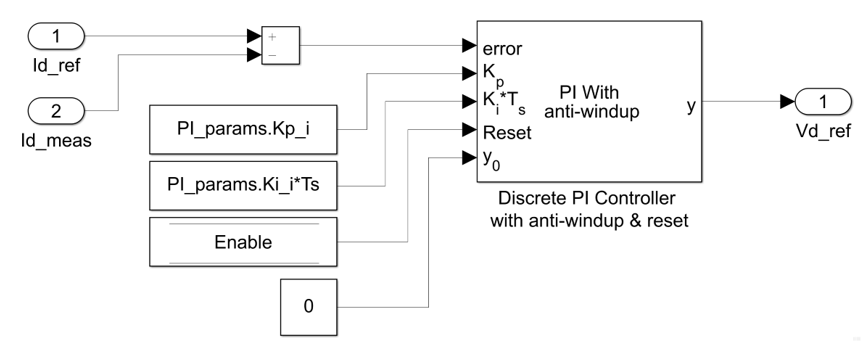
Функция MATLAB mcb.internal.SetControllerParameters (в сценарии инициализации модели) вычисляет коэффициенты усиления управления PI для контроллера тока d-оси и q-оси и контроллера скорости. Дополнительные сведения об оценке усиления управляющего параметра см. в разделе Оценка усиления управления из параметров двигателя. См. файл сценария инициализации модели mcb_pmsm_foc_qep_f28379d_data.m (используется в примере Полевое управление PMSM с использованием квадратурного кодера) для времени выборки (Ts) 50мкс.
На схеме подсистемы переменная Enable является памятью хранилища данных, используемой для сброса контроллера. Добавление переменной Enable является необязательным.
Подсистема также использует три постоянных блока со следующими значениями:
PI_params.Kp_i
PI_params.Ki_i*Ts
0
Создайте подобную подсистему для q-axis PI контроллера. Интеграция подсистем для контроллеров PI d-оси и q-оси в единую подсистему (Current_Controllers), которая управляет токами d-оси и q-оси.
Добавьте блоки «Преобразование Кларка», «Преобразование парка», «Обратное преобразование парка» и «Генератор векторов пространства» из Motor Control Blockset/Controls/Math Transformsв Current_controllers подсистему (созданную на шаге 1), как показано на этом рисунке.
![]()
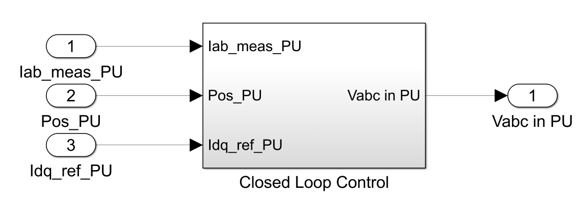
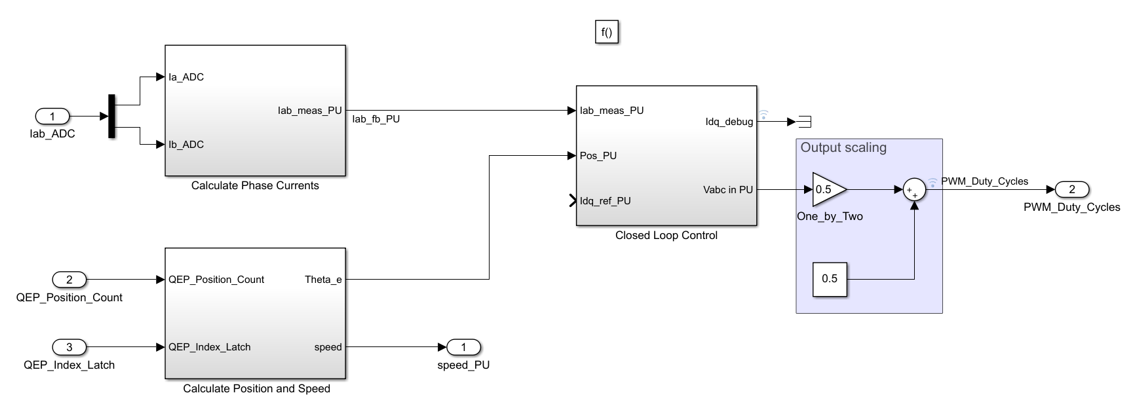
Интегрируйте компоненты, созданные на шаге 2, в единую подсистему (управление по замкнутому контуру, реализующую управление, ориентированное на замкнутый контур), как показано на этом рисунке.
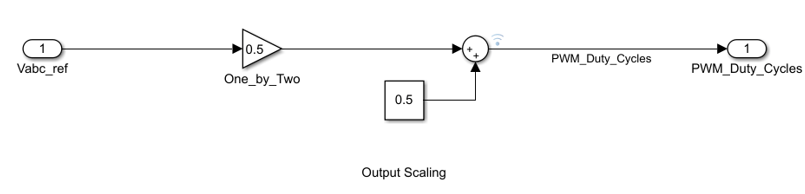
Создайте подсистему масштабирования выходного сигнала для масштабирования выходных сигналов широтно-импульсной модуляции (ШИМ). Эта подсистема выводит нормированные рабочие циклы ШИМ (0-1) для модели завода.
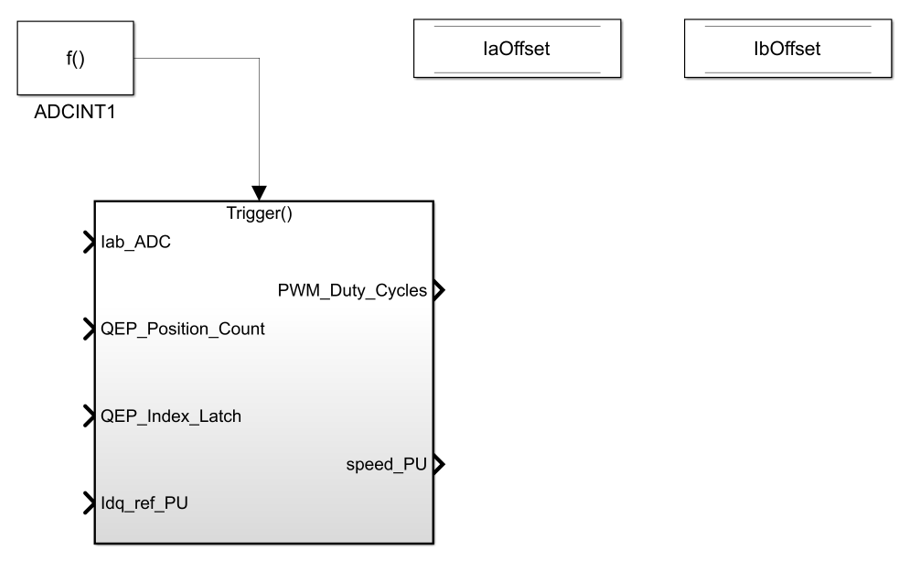
Создайте новую подсистему путем интеграции текущего масштабирования, декодирования позиций QEP, управления замкнутым контуром и масштабирования выходных данных. Добавить триггерный блок из Simulink/Ports & Subsystems библиотека в этой подсистеме и установите для параметра Trigger type значение function-call.
Добавление блока генератора вызовов функции из Simulink/Ports & Subsystems к подсистеме, созданной на шаге 5. Установите параметр Sample time блока равным времени выборки контрольного цикла, Ts (значение по умолчанию: 50e-6 s).
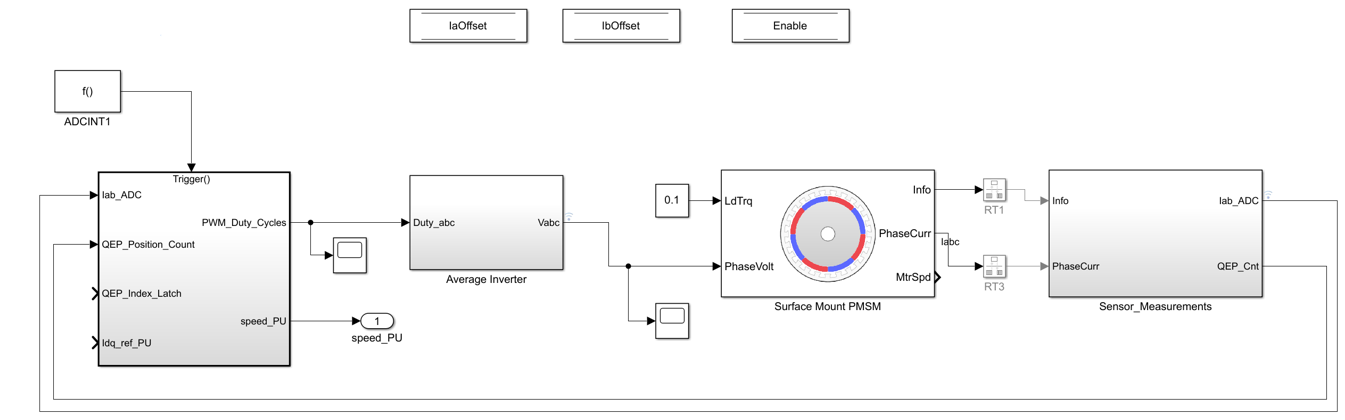
Интегрируйте модель завода и подсистему контроллера, созданную на шаге 6. Подробные инструкции по созданию модели завода для системы управления двигателем см. в разделе Создание модели завода с помощью блока управления двигателем.