Выполните следующие действия для проектирования подсистемы масштабирования тока и положения:
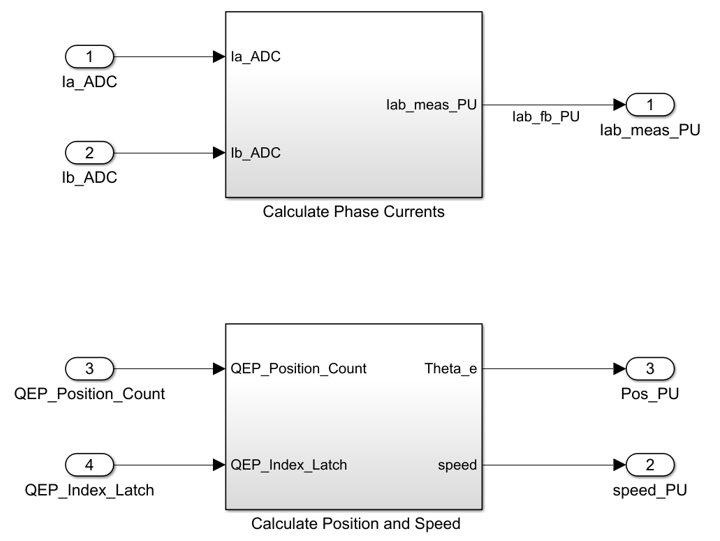
Создайте текущую подсистему масштабирования.
Эта подсистема считывает ток в счетчиках АЦП и преобразует его в значения на единицу (PU).
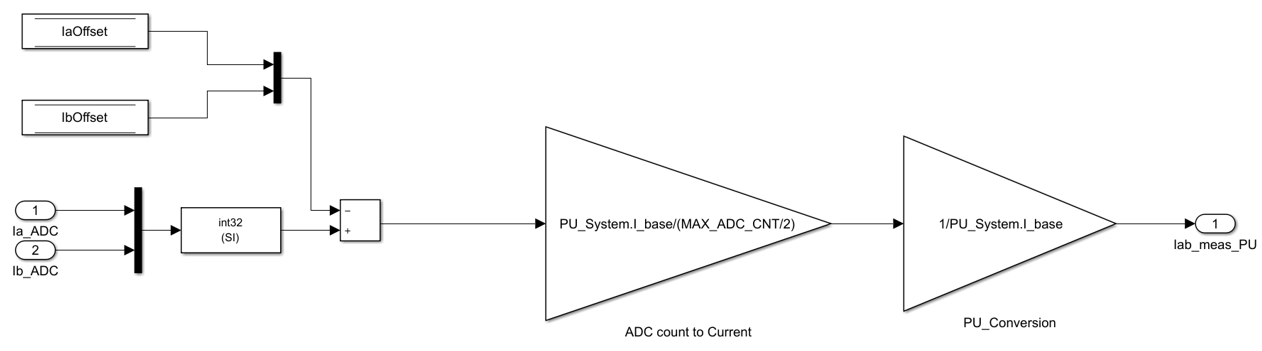
В этой подсистеме
блоки памяти хранилища данных IaOffset и IbOffset являются ADC-смещениями для текущего измерения и являются аппаратными. Файл mcb_SetInverterParameters.m содержит смещение ADC по умолчанию (CtSensAOffset и CtSensBOfset) для нескольких коммерчески доступных инверторов. Для получения дополнительной информации о ADC возмещает калибровку в аппаратных средствах, видят Пробег 3-фазовые электродвигатели переменного тока в Контроле разомкнутого контура и Калибруют Смещение ADC.
В этой подсистеме фазовый ток двигателя, измеренный в счетчиках АЦП, преобразуется в ток в ПУ. PU_System.I_base значение относится к базовому току в этой подсистеме. Для получения более подробной информации о системе PU см. Система на единицу измерения. См. раздел mcb_SetPUSystem.m файл, в котором вычисляются значения PU для системы.
Базовые значения можно использовать для вычисления реальных значений из единицы измерения. Для реализации реальных значений единиц СИ см. модель. mcb_pmsm_foc_qep_f28379d_SIUnit используется в примере Полевое управление PMSM с использованием единиц СИ.
Блоки памяти хранилища данных IaOffset и IbOffset используются для совместного использования данных между текущей и позиционной подсистемами.
Создайте подсистему масштабирования позиций.
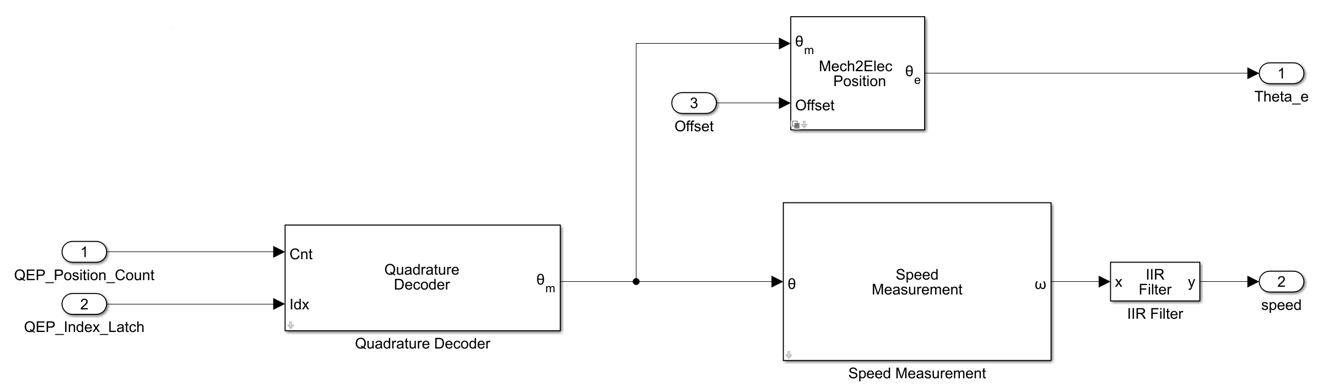
Эта подсистема считывает положение ротора из числа импульсов QEP.
В этой подсистеме блок квадратурного декодера считывает число позиций из модели установки или блока аппаратного драйвера. Блок преобразует механическое положение ротора в положении кодера в механический угол ротора в ПУ (0-1).
Блок «Механическое положение - электрическое положение» (Mech2Elec Position) регулирует механический угол для смещения QEP и преобразует его в электрический угол. Этот электрический угол ротора необходим алгоритму ВОК для вращения двигателя. Расчет смещения кодера QEP см. в разделе Калибровка смещения квадратурного кодера для двигателя PMSM.
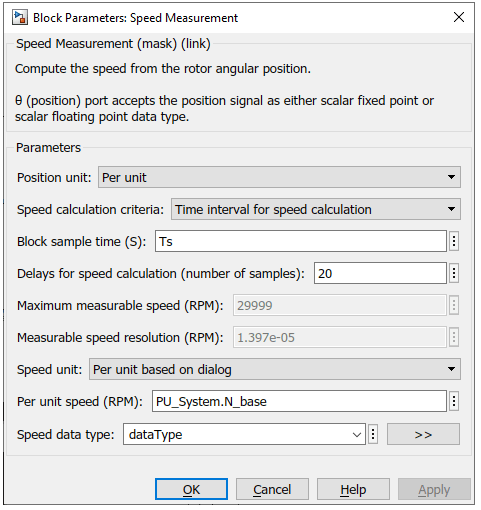
Блок измерения скорости вычисляет скорость из положения ротора. В диалоговом окне «Параметры блока измерения скорости» задайте для параметра «Задержки для расчета скорости (количество выборок)» значение 20. Мы выбрали значение 20 в этом рабочем процессе, чтобы блок мог измерить максимальную частоту вращения тестируемого двигателя. Блок измерения скорости выводит скорость в PU.
Создаваемые подсистемы включают логику текущего масштабирования и декодирования позиций.