Для разработки алгоритма управления скоростью:
Создайте подсистему контроллера скорости. Iq_ref токовый выход подсистемы контроллера скорости используется как вход в подсистему текущего контроллера, созданную ранее.
Чтобы создать подсистему контроллера скорости, в браузере библиотеки Simulink ® выберите дискретный PI-контроллер с блоком защиты от намотки и сброса из Motor Control Blockset/Controls/Controllers библиотека.
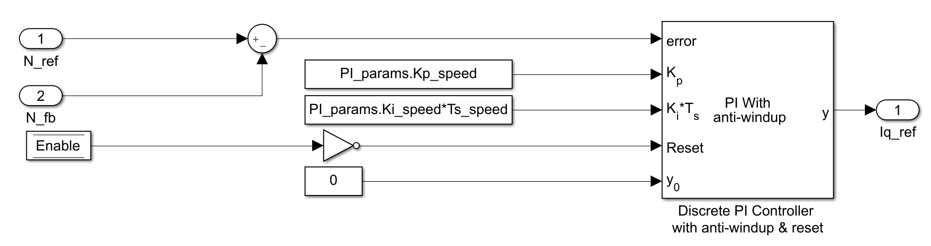
Функция MATLAB ® mcb.internal.SetControllerParameters (в сценарии инициализации модели) вычисляет коэффициенты усиления управления PI для контроллера тока d-оси и q-оси и контроллера скорости. Дополнительные сведения об оценке усиления управляющего параметра см. в разделе Оценка усиления управления из параметров двигателя. См. файл сценария инициализации модели mcb_pmsm_foc_qep_f28379d_data.m (используется в примере Полевое управление PMSM с использованием квадратурного кодера) для времени выборки (Ts_speed) 500мкс. Используйте блок Enable Data-Store Memory для сброса контроллера, но это необязательно.
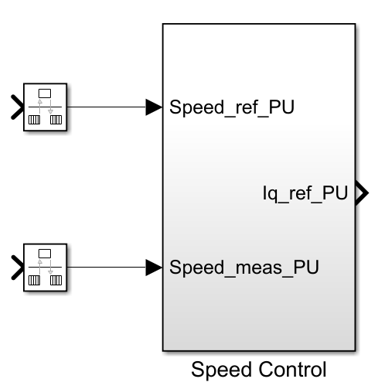
Создайте подсистему для контроллера скорости и добавьте блок перехода скорости (из Simulink/Signal Attributes библиотека) на входы с Ts_speed временем выборки (время выполнения контура управления скоростью).
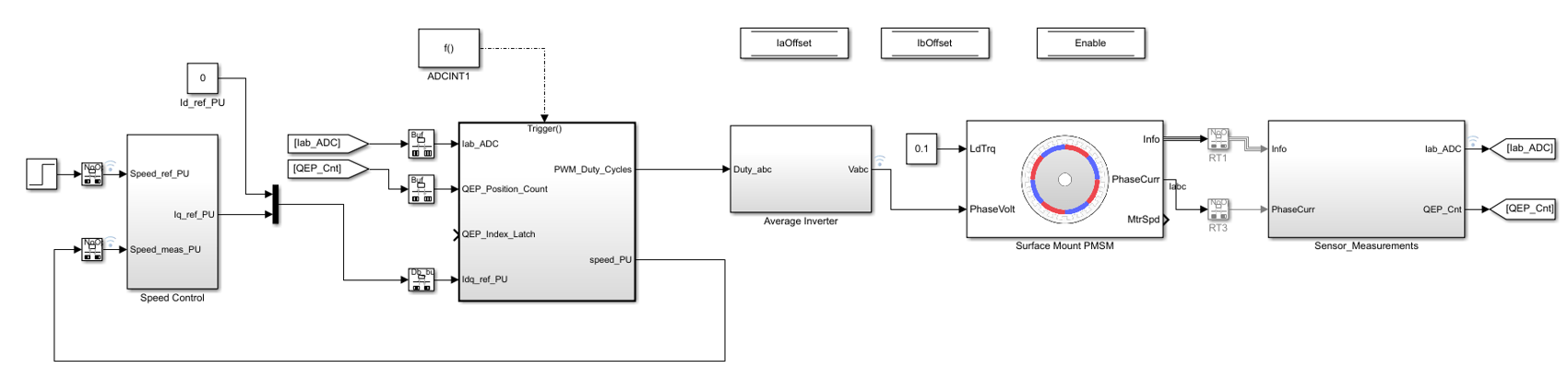
Интеграция подсистемы контроллера скорости с интегрированными подсистемами контроллера тока и модели установки. Подключите Iq_ref_PU выходной порт подсистемы контроллера скорости к входному порту подсистемы текущего контроллера через блок перехода скорости, так как оба порта работают с различной частотой дискретизации. На этом рисунке показан пример настроек блока изменения скорости, подключенного к подсистемам контроллера скорости и контроллера тока.
![]()
На этом рисунке показаны интегрированные подсистемы контроллера скорости, контроллера тока и модели установки.