Переменная инерция - это формообразующий элемент, масса, центр масс или тензор инерции которого может изменяться во времени. Переменные инерции включают в себя содержимое ковша с задним лафетом, движущихся пассажиров подъемника стрелы и толкающую текучую нагрузку замедляющего автоцистерны. Для моделирования инерции переменной используется блок «Общая переменная масса» из библиотеки «Элементы тела» > «Переменная масса». Этот блок принимает различные инерционные свойства в качестве констант или переменных. Физические сигнальные порты обеспечивают средства для задания переменных свойств.
Нагрузка жидкости как переменная инерция
Переменные входные данные можно задать с помощью блоков Simscape™ или Simulink ®. Необходимо преобразовать любые сигналы Simulink в физические сигналы с помощью блока Simulink-PS Converter. Избегайте внезапных изменений, поскольку они могут увеличить жесткость модели и замедлить моделирование. Убедитесь, что размеры сигнала совпадают с размерами портов:
Скаляр для массы (порт m)
Трехэлементный вектор для центра масс (порт com)
Девятиэлементная матрица для тензора инерции (порт I)
Переменные инерции, связанные с блоками общей переменной массы, не имеют геометрии. Необходимо визуализировать эти инерции как графические маркеры или как эквивалентные эллипсоиды инерции. Размеры эллипсоидов и центр геометрии изменяются в зависимости от массы, центра масс и тензора инерции, что делает эллипсоиды более информативными для визуализации модели. Маркеры инерции отображаются при обновлении модели и во время моделирования. Эллипсоиды переменной инерции отображаются только во время моделирования. На чертеже показана инерционная визуализация, представляющая нагрузку жидкости, переносимую автоцистерной.
Эквивалентная инерционная эллипсоидная визуализация
Блок «Общая переменная масса» фиксирует только инерционные эффекты. Любые взаимодействия между переменными инерциями и другими компонентами модели должны моделироваться явно. Примеры взаимодействий включают в себя контактные силы между нагрузкой на жидкость автоцистерны и окружающей оболочкой. Они также включают изменение импульса, получаемого при выбросе продуктов сгорания двигательной установки - например, в морском или космическом аппарате. Используйте другие блоки Simscape Multibody™, Simscape и Simulink для захвата таких взаимодействий.
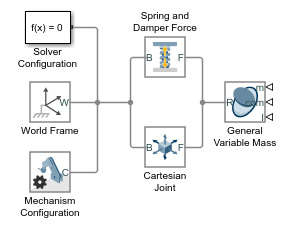
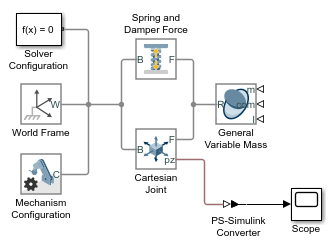
Создайте простую модель системы масса-пружина для моделирования в условиях постоянной массы и переменной массы. Модель использует блок «Общая переменная масса» для представления контейнера, в который постепенно сбрасывается груз песка. Блок декартового соединения предоставляет телу переменной массы три поступательные степени свободы, хотя во время моделирования релевантна только одна - вдоль вертикальной оси z. Блок силы пружины и демпфера представляет собой пружинный элемент, который соединяет тело переменной массы с рамой World.

В командной строке MATLAB ® введитеsmnew. Команда открывает шаблон модели с часто используемыми блоками Simscape Multibody.
Добавьте к холсту модели следующие блоки:
Общая переменная масса (элементы тела > Переменная масса)
Декартово соединение (соединения)
Сила пружины и демпфера (силы и крутящие моменты)
Подключите блоки, как показано на рисунке, и удалите оставшиеся блоки. Убедитесь, что ориентация блока соединения показана на рисунке, а порт базовой рамы обращен к блоку мировой рамы.
В диалоговом окне «Блок пружины и демпфера» задайте для параметра «Естественная длина» значение 0.2 m и параметр Жесткость пружины (Spring Stiffness) для 10 Н/м.
В диалоговом окне «Блок декартового соединения» разверните область «Z призматический примитив (Pz)», установите флажок «Цели состояния» > «Указать цель положения» и установите для параметра «Значение» значение 0.1 м.
В диалоговом окне Блок декартового соединения (Cartesian Joint) разверните область Z Prismatic Primitive (Pz) и установите флажок Датчик (Sensing) > Положение (Position). Блок открывает выходной порт физического сигнала с положением кадра генератора.
Добавьте к холсту модели следующие блоки:
PS-Simulink Converter (Simscape > Библиотека фундамента > Утилиты)
Область (Simulink > Раковины)
Подключите блоки, как показано на рисунке.
В диалоговом окне «Блок общей переменной массы» задайте для параметра «Тип» значение Custom. Эта опция позволяет моделировать распределение переменной массы с вращательной инерцией.
Задайте для параметров Масса (Mass), Центр масс (Center of Mass) и Матрица инерции (Inertia Matrix) значение Constant и параметр «Масса» > «Значение» для 0.2 кг.
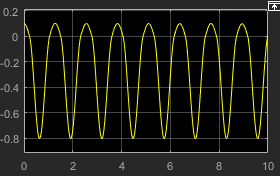
Запустите моделирование и откройте блок «Scope». На графике показано положение опорной рамки переменной массы. Следует отметить, что частота колебаний и амплитуда остаются постоянными во время моделирования.
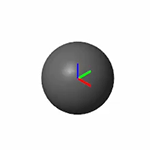
Откроется Mechanics Explorer с 3-D анимацией модели. Визуализация включает только инерционный эллипсоид - здесь сфера из-за симметрии тензора инерции по умолчанию, используемого в модели. В строке меню выберите «Вид» > «Показать кадры», чтобы показать все кадры в модели. Обратите внимание, что эллипсоидные размеры остаются постоянными во время моделирования, отражая постоянные инерционные свойства, заданные в модели.
В диалоговом окне Блок общей переменной массы (General Variable Mass Block) задайте для параметров Матрица центра массы (Center of Mass and Inertia Matrix) значение Constant. Физические сигнальные порты, используемые для изменения их значений во время моделирования, становятся скрытыми, оставляя переменным только массу твердого тела.
Добавьте в холст модели следующие блоки:
Конвертер Simulink-PS (Simscape > Библиотека фундамента > Утилиты)
Пандус (Simulink > Источники)
Подключите блоки, как показано на рисунке.
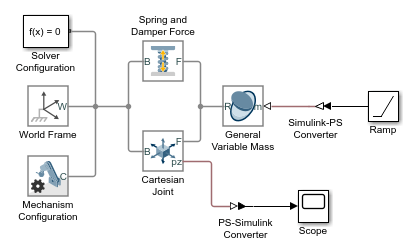
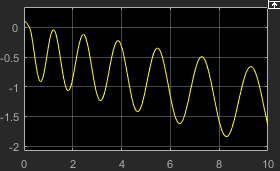
В диалоговом окне «Блок пандуса» задайте для параметра «Уклон» значение 0.1 и параметр Initial output для 0.2. Сигнал Ramp передается в блок General Variable Mass в единицах массы Simscape по умолчанию, кг. Сигнал соответствует постоянно возрастающей массе, которая начинается с 0.2 кг и заканчивается при 1.2 кг после 10-секундного моделирования.
Запустите моделирование и откройте блок «Scope». График положения показывает переменную частоту и амплитуду колебаний. Увеличение массы вызывает увеличение частоты колебаний и уменьшение амплитуды.
Mechanics Explorer обновляет результаты визуализации. Обратите внимание, что размеры эллипсоидов уменьшаются по мере выполнения моделирования, отражая их обратную пропорциональность переменной массе.