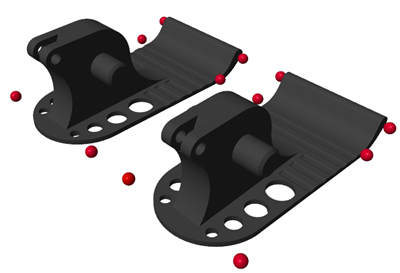
Контактные прокси - это простые фигуры, которые используются для представления контактных частей фактических тел. Например, в примере Train Humanoid Walker красные сферы используются для представления дна роботизированных ног.
Использование прокси-серверов контактов позволяет повысить скорость и надежность моделирования контактов. Например, использование прокси-серверов контактов может ускорить модели, в которых используются сложные геометрии, и предотвратить прерывистый скачок местоположений контактных сил при моделировании статических контактов.
Контактные посредники могут использоваться во многих случаях. Однако добавление контактных прокси-серверов требует больших усилий по моделированию, и в нескольких случаях использование прокси-серверов затруднено. Если контактное взаимодействие включает в себя все особенности фактических тел, то доверенные лица могут быть не в состоянии полностью представлять каждый элемент тел. Если модель проста и ее нужно запустить только один раз, можно использовать фактические тела для моделирования контакта.
Чтобы выбрать подходящие прокси для проблемы контакта, необходимо указать, какие части фактических тел будут взаимодействовать, а затем выбрать простейшие прокси для этих частей. Обратите внимание, что прокси-серверов должно быть достаточно для охвата всех областей контактов.
Simscape™ Multibody™ поддерживает различные геометрии и тела для контактного моделирования. В зависимости от сложности эти геометрии и тела можно разделить на три группы.
Геометрия, определяемая блоками Точка (Point), Бесконечная плоскость (Infinite Plane) и Сферическое твердое тело (Spherical Solid). Эти геометрии являются лучшими кандидатами для работы в качестве прокси-серверов благодаря их простым формам и высокой эффективности моделирования.
Тела, определяемые блоками «Кирпичное тело», «Цилиндрическое тело» и «Эллипсоидальное тело». Они более затратны в вычислительном отношении, чем геометрия первой группы. Если нельзя использовать геометрию в первой группе, попробуйте использовать тела в этой группе в качестве прокси-серверов.
Геометрия, создаваемая выдавливанием, вращениями и САПР, импортируется. Обычно эти геометрии не подходят для использования в качестве прокси-серверов из-за их сложных форм, высоких вычислительных затрат и упрощенных представлений. Обратите внимание, что Simscape Multibody представляет некоторые из этих геометрий с выпуклыми корпусами вместо фактических тел при моделировании контактов.
Simscape Multibody моделирует контакт между телами с помощью блока Пространственная сила контакта (Spatial Contact Force). Для каждой пары потенциально контактирующих деталей требуется один блок пространственной контактной силы. Следовательно, сложная модель, включающая множество прокси-серверов, может привести к множеству блоков пространственной контактной силы и геометрических линий. Чтобы сохранить структуру блок-схемы, используйте следующие методы. См. первый пример использования этих методов.
Поместите каждое фактическое тело и его прокси в одну подсистему. Подсистема также должна включать все соответствующие блоки жесткого преобразования, необходимые для правильного размещения прокси-серверов относительно фактического тела.
Копирование и вставка подсистем или использование связанных подсистем для создания идентичных подсистем.
Блок шины Simscape используется для объединения геометрических линий сложной модели.
Обычно фактическое тело и его доверенные лица занимают некоторые общие области в 3-D пространстве. Следует визуализировать только фактическое тело и скрыть прокси в окончательной версии моделирования. Однако во время этапа моделирования или отладки рекомендуется просмотреть прокси-серверы, чтобы проверить, все ли контакты смоделированы так, как ожидалось. Рассмотрите возможность определения двух переменных для корректировки прозрачности фактического тела и прокси-сервера. Используйте массу фактического тела для моделирования и установите нулевую массу или плотность контактных прокси-серверов, чтобы избежать влияния на динамику.
Моделирование контакта между телами со сложными формами является дорогостоящим и трудоемким. Чтобы ускорить модель, можно разложить сложные фигуры на более простые детали и использовать прокси-серверы для представления деталей, участвующих в контакте, а затем смоделировать контакты между этими прокси-серверами.
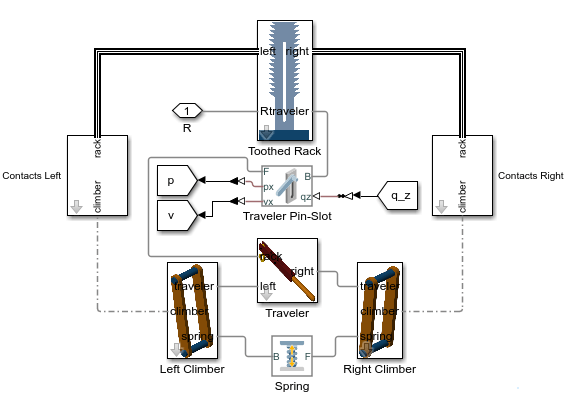
В примере Ratchet Lifter путешественник поднимается вверх вдоль зубчатой стойки, когда ручка путешественника накачивается вверх и вниз. В контакт включаются только горизонтальные и наклонные поверхности зубьев стойки и цилиндры альпинистов. Также путешественник проявляет только плоское движение. Другими словами, в контактное взаимодействие вовлечены только центральные части цилиндров альпиниста. Поэтому в примере прокси-серверы используются для представления контактов только этих деталей и моделей среди прокси-серверов.
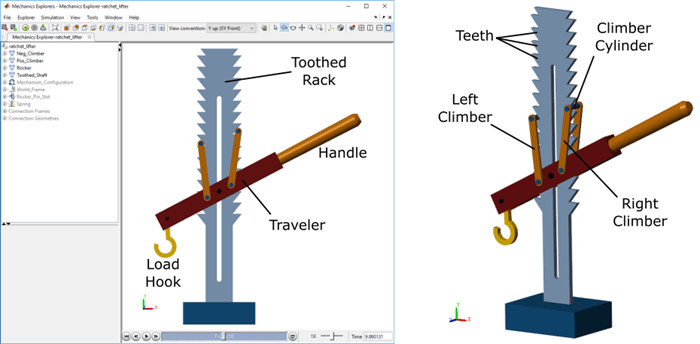
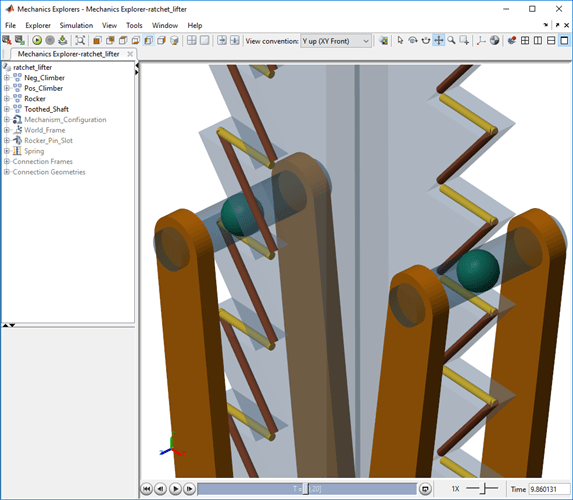
В этом примере используются цилиндры для представления горизонтальных и наклонных поверхностей зубьев стойки и сфер для представления центральных частей цилиндров альпинистов. Преимущество использования сферы вместо всего альпинистского цилиндра заключается в том, что сферы проще цилиндров и обеспечивают более эффективное контактное моделирование.
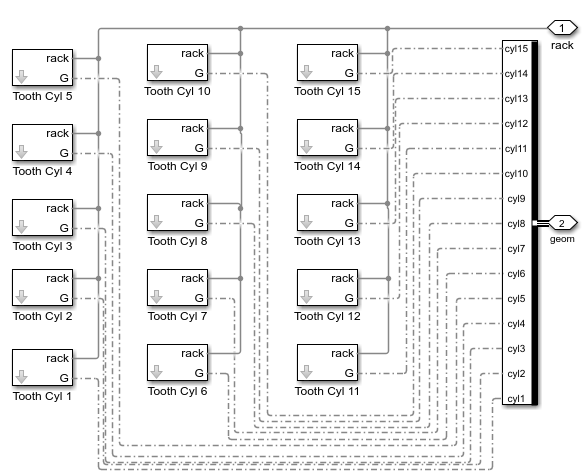
Зубчатая рейка симметрична и имеет по 15 зубьев с каждой стороны. Следовательно, в этом примере используются 60 цилиндров для представления зубьев. Модель включает подсистему, называемую зубчатой стойкой, которая включает фактическое тело стойки, все прокси зубьев и соответствующие блоки жесткого преобразования. На следующем рисунке показана подсистема зубчатой стойки.
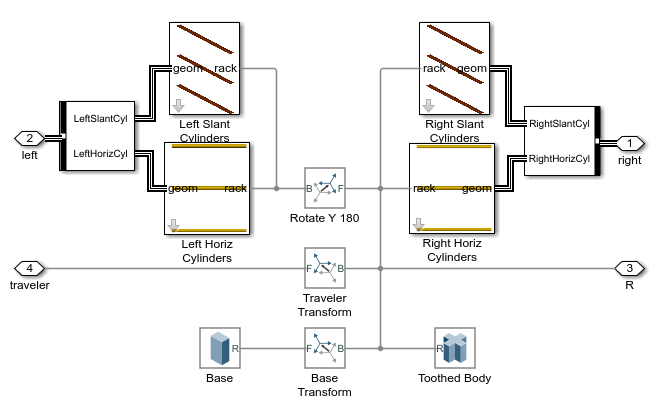
Поскольку зубчатый статив симметричен, только прокси-серверы с одной стороны статива были созданы вручную и сгруппированы в подсистемы «Левые наклонные цилиндры» и «Левые горизонтальные цилиндры». Затем эти подсистемы были скопированы, вставлены, а затем повернуты на 180 градусов вокруг y- ось для представления правых зубьев.
На следующем рисунке показана подсистема «Левосторонние цилиндры». Модель использует 15 одинаковых цилиндров для представления горизонтальных поверхностей левосторонних зубьев. Чтобы минимизировать количество созданных вручную блоков, была создана одна параметризованная подсистема для моделирования одного из цилиндров. Затем параметризованная ссылочная подсистема копировалась 14 раз. В параметризованных подсистемах используются индексы цилиндров для указания местоположения цилиндров. Наконец, геометрические линии цилиндров связываются с помощью блока Simscape Bus. Этот же метод используется для моделирования подсистемы наклонных поверхностей зубьев.
Блок Simscape Bus помогает избежать сложной сети линий во всей модели. На следующем рисунке показано, что две линии Simscape Bus соединяют 60 прокси зубьев стойки с прокси альпинистов через подсистемы Contacts Left и Contacts Right.
Подсистемы «Контакты слева» и «Контакты справа» включают все блоки пространственной контактной силы для данного моделирования. На следующем рисунке показана схема контакта между горизонтальной поверхностью левосторонних зубьев и цилиндром левого альпиниста.
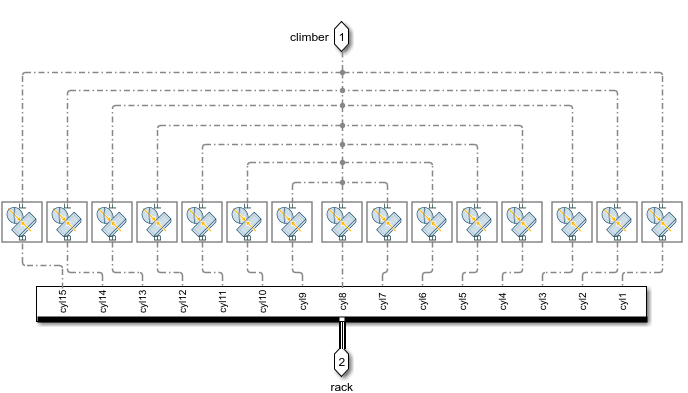
Simscape Multibody использует метод точечного штрафа для моделирования контакта между телами. Этот метод означает, что блок пространственной контактной силы прикладывает необходимые контактные силы к своим соединенным телам в точках с максимальным проникновением между двумя телами. Каждый блок пространственной силы контакта применяет только одну силу контакта для каждого тела на каждом шаге времени.
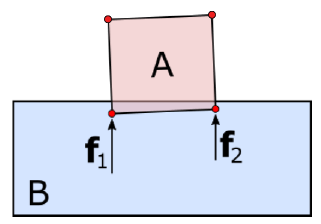
Этот точечный метод имеет проблемы при моделировании статического контакта между плоскими поверхностями тел. Например, можно смоделировать контакт между двумя кирпичами. Для простоты на следующем рисунке показана 2-D версия проблемы. Предположим, что кирпич A опускается на кирпич B, который имеет фиксированное положение. Левое изображение показывает конфигурацию кирпичей при первом обнаружении контакта. В этот момент блок Пространственная сила контакта (Spatial Contact Force) применяет силу контакта к нижнему левому углу кирпича А. Со временем сила замедляет движение кирпича А вниз и поворачивает его в направлении по часовой стрелке. Затем конфигурация выглядит как правое изображение, и усилие прикладывается к правому нижнему углу кирпича A. По мере того, как кирпич A переходит в статический контакт с кирпичом B. расположение контактной силы быстро и прерывисто скачет по углам кирпича A. Такое поведение является сложным для решателя и может значительно снизить скорость моделирования.
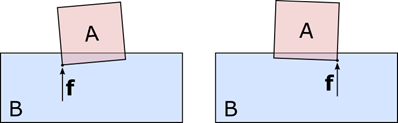
Использование контактных прокси-серверов является одним из эффективных способов избежать вышеуказанных проблем моделирования. Восемь небольших сфер могут быть жестко прикреплены к углам кирпича A. С этими доверенными лицами контакт моделируется как восемь пар кирпич-сфера вместо одной пары кирпич-кирпич. По мере стабилизации контакта нормальная сила в каждом нижнем углу будет составлять одну четвертую веса кирпича А.
Кирпичное тело | Цилиндрическое твердое тело | Эллипсоидальное твердое тело | Выдавленное твердое тело | Твердое тело файла | Бесконечная плоскость | Пункт | Шина Simscape | Сила пространственного контакта | Сферическое твердое тело
