Общий двигатель и привод с замкнутым контуром регулирования крутящего момента
Simscape/Электрическое/Электромеханическое/Системное моделирование
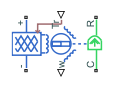
Блок двигателя и привода (уровень системы) представляет общий двигатель и привод с управлением крутящим моментом по замкнутому контуру. Используйте этот блок для моделирования бесщеточного двигателя (такого как PMSM) и приводных или, в более общем случае, тяговых и исполнительных систем, реализованных с использованием широкого спектра типов двигателей.
Чтобы обеспечить быстрое моделирование на системном уровне, этот блок абстрагирует электродвигатель, электронику привода и управление.
Блок допускает только диапазон крутящих моментов и скоростей, определяемый оболочкой крутящего момента и частоты вращения. В конфигурации блока по умолчанию эти данные задаются в диалоговом окне блока как набор точек данных скорости и соответствующих максимальных значений крутящего момента.
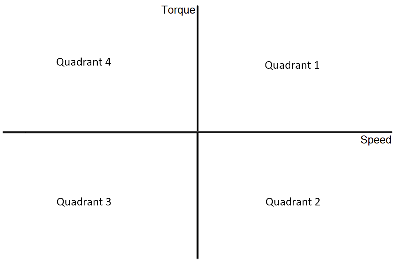
На этом рисунке показано определение декартовых квадрантов:
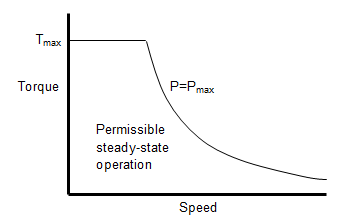
На следующем рисунке показан типичный диапазон крутящего момента и частоты вращения для двигателя и привода, управляемых крутящим моментом.

Укажите огибающую крутящий момент-скорость только для области положительного крутящего момента, то есть квадрантов 1 и 4. Если задать только положительные скорости (квадрант 1 или, что эквивалентно, область моторирования), то огибающая крутящего момента квадранта 4 определяется блоком как зеркальное изображение квадранта 1. Оболочка крутящий момент-частота вращения двигателя имеет тот же профиль, когда двигатель работает в обратном направлении (квадранты 2 и 3).
Вместо предоставления табличных данных о крутящем моменте и скорости можно указать максимальный крутящий момент и максимальную мощность. Это приводит к показанному ниже профилю огибающей крутящего момента и скорости. Остальные три рабочих квадранта ограничены этим же профилем.
Блок создает положительный крутящий момент, действующий от механических портов C к R.
Чтобы увеличить крутящий момент двигателя в течение короткого периода времени, установите для параметра Разрешить прерывистый чрезмерный крутящий момент значение Yes. В этом случае необходимо указать значения как для параметров максимальной огибающей крутящего момента непрерывной работы, так и для параметров максимальной огибающей крутящего момента периодической работы. Внутри блок определяет, какая оболочка крутящего момента должна применяться на основе истории потребности в крутящем моменте. Можно увеличить крутящий момент привода двигателя, если требуемый крутящий момент был меньше, чем диапазон крутящего момента непрерывной работы, в течение более чем значения, указанного в параметре Время восстановления (Recovery time). Превышение крутящего момента отключается, если превышение крутящего момента было применено дольше, чем указано в параметре Предел времени превышения крутящего момента.
Для более специализированного управления избыточным крутящим моментом отключите избыточный крутящий момент в блоке двигателя и привода и реализуйте внешнее ограничение крутящего момента в Simulink™ между требуемым крутящим моментом и опорным входным отверстием Tr блока двигателя и привода.
Блок позволяет как упрощенное, так и табличное определение электрических потерь. Поведение по умолчанию, упрощенное, заключается в моделировании потерь как суммы следующих четырех терминов:
Последовательное сопротивление между источником питания постоянного тока и электроприводом.
Фиксированные потери независимо от крутящего момента и скорости, P0. Используется для учета фиксированных потерь преобразователя.
Зависящие от крутящего момента электрические потери k Это означает омические потери в медных обмотках.
Зависящие от скорости электрические потери kwstart2, где λ - скорость, а kw - постоянная. Это представляет потери железа из-за вихревых токов.
Это упрощение зависимости потерь от крутящего момента и скорости может быть достаточным для ранних проектных работ, независимо от типа двигателя и топологии привода.
Если требуется большая точность или более поздняя в процессе проектирования, можно предоставить табличные значения потерь в зависимости от скорости двигателя и крутящего момента нагрузки. При использовании этой опции укажите данные для всех рабочих квадрантов, в которых будет выполняться моделирование. Если предоставить частичные данные (например, только для области прямого моторирования квадранта 1), то предполагается, что другие квадранты повторяют тот же шаблон потерь. Обычно это будет правильно для области обратного моторирования, но может быть аппроксимацией для квадрантов торможения/генерации. Блок не экстраполирует значения потерь для значений скорости и крутящего момента, которые превышают диапазон таблицы.
Наконец, можно указать электрические потери с помощью табличных данных эффективности вместо одного измерения эффективности или табличных данных потерь. При использовании этой опции также предоставьте данные для всех рабочих квадрантов, в которых будет выполняться моделирование. Если предоставить частичные данные (например, только для области прямого моторирования квадранта 1), то предполагается, что другие квадранты повторяют тот же шаблон потерь.
Наилучшая практика заключается в предоставлении табличных данных о потерях в зависимости от скорости и крутящего момента, а не табличных данных об эффективности, поскольку:
Эффективность становится плохо определенной для нулевой скорости или нулевого крутящего момента.
Используя потери, можно также учитывать фиксированные потери, которые по-прежнему присутствуют для нулевой скорости или крутящего момента.
При использовании опции эффективности в таблице:
Блок преобразует предоставленные значения эффективности в потери и использует табличные потери для моделирования.
Значения КПД для нулевой скорости или нулевого крутящего момента игнорируются, а потери принимаются равными нулю, если крутящий момент или скорость равны нулю.
Блок использует линейную интерполяцию для определения потерь. Предоставьте табличные данные для низких скоростей и низких крутящих моментов, при необходимости, чтобы получить требуемый уровень точности для условий пониженной мощности.
Блок не экстраполирует значения потерь для значений скорости и крутящего момента, которые превышают диапазон таблицы.
При предоставлении табличных данных о потерях или эффективности их можно также указать как функцию скорости, крутящего момента нагрузки и напряжения питания постоянного тока. Эта опция полезна, когда напряжение питания не регулируется и может изменяться во время моделирования. Одним примером является трансмиссия электромобиля, которая не имеет регулятора постоянного тока перед приводом электродвигателя. Используйте блок «Двигатель и привод (уровень системы)» для моделирования привода двигателя и представления табличных значений потерь или КПД в зависимости от скорости двигателя, крутящего момента нагрузки и напряжения питания постоянного тока.
Блок предоставляет четыре варианта моделирования, доступ к которым можно получить, щелкнув правой кнопкой мыши блок на блок-схеме и выбрав соответствующий параметр в контекстном меню в меню Simscape > Block choices:
Без теплового порта - базовая модель, которая не моделирует неисправности или тепловые эффекты. Это значение по умолчанию.
Показать тепловой порт - модель с открытым тепловым портом. Эта модель не моделирует отказы.
Failable | No thermal port - модель с открытым портом управления отказом. Эта модель не моделирует тепловые эффекты.
Failable | Show thermal port - модель, позволяющая моделировать как отказы, так и тепловые эффекты. Открыты как тепловой порт, так и порт ввода отказа.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, выберите один из вариантов блока, моделирующих тепловые эффекты, как описано в разделе Варианты блока. Это действие отображает тепловой порт H на значке блока и отображает параметры Температурная зависимость (Temperature Dependence) и Тепловой порт (Thermal Port). Эти параметры описаны далее на этой справочной странице.
Используйте тепловой порт для моделирования влияния потерь сопротивления меди, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Входной порт физического сигнала F можно использовать для моделирования отказа сервомотора, а также для подключения и отключения источника постоянного тока. Вы не можете имитировать отключение источника постоянного тока, просто открывая переключатель, потому что на клеммах сервомотора должно быть конечное напряжение, создающее ток, уравновешивающий электрическую и механическую мощность.
Чтобы открыть порт управления отказом, выберите один из вариантов блока с ошибками, как описано в разделе Варианты блока. Это действие отображает порт F ввода физического сигнала на значке блока и добавляет вкладку «Отказы» в диалоговое окно блока. Эти вкладки описаны далее на этой справочной странице.
Если сигнал подключен к порту F, то блок работает в соответствии с настройками параметров на вкладке Faults. Например, если условие Fault Faulted if F >= Fault threshold, то когда сигнал на порте F поднимается выше порогового значения Fault, сервомотор прекращает работу, со стороны питания берется нулевой ток, а на сторону нагрузки подается нулевой ток.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
Привод двигателя отслеживает потребность в крутящем моменте с постоянной времени Tc.
Колебания скорости двигателя из-за механической нагрузки не влияют на отслеживание крутящего момента двигателя.
Двигатель постоянного тока | Индукционная машина (однофазная) | Шунт-мотор | Универсальный двигатель


