Увеличение завода для взвешенной смешанной чувствительности H ∞ и дизайн формирования петли H2
P = augw(G,W1,W2,W3)P - дополненная установка следующей схемы.
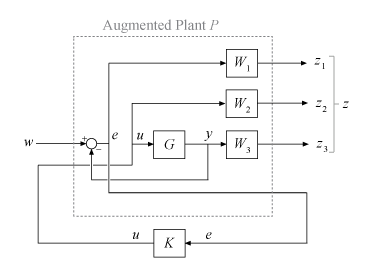
Эта структура управления используется в смешанном синтезе H∞, что позволяет разработать контроллер H∞, одновременно формируя частотные характеристики для отслеживания и отклонения возмущений, снижения шума и надежности, а также усилия контроллера. Дополнительные сведения см. в разделе Формирование цикла смешанной чувствительности.
Предположим, вы хотите синтезировать стабилизирующий надежный контроллер для системы следующей диаграммы. Контроллер также должен отклонять нарушения, вводимые на выходе установки.

Завод, G, является нестабильной системой первого порядка.
G = tf(1,[1 -1]);
Как настроить эту проблему для hinfsyn, вставить взвешивающую функцию W1 который фиксирует цель отклонения возмущения и другую взвешивающую функцию W3 для обеспечения надежности. Задайте эти функции взвешивания как обратные значения требуемых форм цикла для чувствительности S и дополнительная чувствительность Tсоответственно. (См. раздел Формирование цикла смешанной чувствительности.)
В этом примере выберите W1 с:
Низкочастотный коэффициент усиления 100 (40 дБ)
Кроссовер 0 дБ при 0,5 рад/с
Высокочастотный коэффициент усиления 0,25 (–12 дБ)
Выбирать W3 чтобы иметь противоположные низкочастотные и высокочастотные коэффициенты усиления.
W1 = makeweight(100,[1 0.5],0.25); W3 = makeweight(0.25,[1 0.5],100); bodemag(W1,W3)

В этом примере не указывайте W2 (никаких ограничений на контрольные усилия). Постройте дополненное растение, P.
P = augw(G,W1,[],W3);
G имеет один вход и один выход. Усиленная установка имеет дополнительный вход для управляющего сигнала и дополнительные выходы для каждого из весов.
size(P)
State-space model with 3 outputs, 2 inputs, and 3 states.
Входы и выходы P группируются для отслеживания входов возмущений и управления, а также выходов ошибок и измерений. Например, группы вывода. Группа Y1 содержит два выхода ошибки z и группу Y2 содержит один выходной сигнал измерения.
P.OutputGroup
ans = struct with fields:
Y1: [1 2]
Y2: 3
Теперь вы можете использовать P для конструкции управления. Например, использовать hinfsyn для разработки оптимального контроллера, отвечающего проектным требованиям, указанным в W1 и W3.
[K,CL,gamma] = hinfsyn(P); gamma
gamma = 0.9946
P - Установка с усилениемДополненное растение, возвращенное как state-space (ss) модель. P может представлять собой любую модель LTI с входами [w; u] и выходами [z; y ].augw группирует входы и выходы P с использованием ss свойства InputGroup и OutputGroup чтобы:
P.InputGroup имеет поле U1 содержащие входные данные, соответствующие w, и поле U2 содержащий входные данные, соответствующие u.
P.OutputGroup имеет поле Y1 содержащие выходы, соответствующие z, и группу Y2 содержащий выходы, соответствующие e.
Здесь {w; u} и {z; e} являются входами и выходами P в следующей системе управления.
Для H∞ или H2 синтеза модели G и W1,W2,W3 должно быть правильно. Другими словами, они должны быть ограничены как (для функций передачи непрерывного времени) или (для функций передачи дискретного времени). Дополнительно, W1,W2,W3 должна быть стабильной. Завод G должны быть стабилизируемыми и обнаруживаемыми. В противном случае результат P не стабилизируется ни одним контроллером.
augw производит форсированную установку P (ы), заданную:
W1G0W20W3GI − G]
Секционирование встраивается с помощью P = mktito(P,NY,NU), которая устанавливает P.InputGroup и P.OutputGroup свойства следующим образом.
[r,c] = size(P);
P.InputGroup = struct('U1',1:c-NU,'U2',c-NU+1:c);
P.OutputGroup = struct('Y1',1:r-NY,'Y2',r-NY+1:r);
