Оптимальный контроллер H2 вычислений
[ вычисляет стабилизирующий контроллер H2-optimal K,CL,gamma] = h2syn(P,nmeas,ncont)K для завода P. Завод имеет секционированную форму
wu],
где:
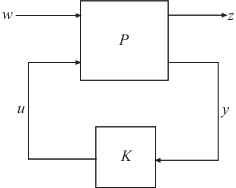
w представляет входы возмущений.
u представляет управляющие входы.
z представляет выходные сигналы ошибок, которые должны оставаться малыми.
y представляет выходные сигналы измерений, подаваемые в контроллер.
nmeas и ncont - количество сигналов в y и u соответственно. y и u являются последними выходами и входами Pсоответственно. h2syn возвращает контроллер K что стабилизирует P и имеет одинаковое количество состояний. Система замкнутого контура CL = lft(P,K) достигает уровня производительности gamma, которая является H2 нормой CL (см. norm).
Стабилизируйте нестабильную установку 5 на 4 с тремя состояниями, двумя измерительными сигналами и одним управляющим сигналом.
На практике, P - это усовершенствованная установка, построенная путем объединения модели системы для управления с соответствующими функциями взвешивания H2. В этом примере используется следующая модель.
A = [5 6 -6
6 0 5
-6 5 4];
B = [0 4 0 0
1 1 -2 -2
4 0 0 -3];
C = [-6 0 8
0 5 0
-2 1 -4
4 -6 -5
0 -15 7];
D = [0 0 0 0
0 0 0 1
0 0 0 0
0 0 3 6
8 0 -7 0];
P = ss(A,B,C,D);Подтвердить, что P неустойчива, исследуя свои полюса, некоторые из которых лежат в правой полуплоскости.
pole(P)
ans = 3×1
-8.5648
6.8612
10.7036
Спроектируйте регулятор стабилизации. h2syn предполагает, что nmeas измерительные сигналы и ncont управляющие сигналы являются последними выходами и последними входами Pсоответственно.
nmeas = 2; ncont = 1; [K,CL,gamma] = h2syn(P,nmeas,ncont);
Осмотрите систему с замкнутым контуром и убедитесь, что контроллер K стабилизирует растение.
pole(CL)
ans = 6×1 complex
-31.6236 + 0.0000i
-12.6460 + 3.8045i
-12.6460 - 3.8045i
-9.6073 + 0.0000i
-9.2393 + 0.0000i
-8.6939 + 0.0000i
Сформируйте графики сингулярных значений чувствительности GK) -1 и комплементарной (I + GK) -1.
Для этого найдите стабилизирующий контроллер K что сводит к минимуму норму:

Предположим, что следующие завод и вес:
= 0,1, W3 = 0.
Используя эти значения, создайте дополненное растение P, как показано в mixsyn справочная страница.
s = zpk('s'); G = 10*(s-1)/(s+1)^2; G.u = 'u2'; G.y = 'y'; W1 = 0.1/(100*s+1); W1.u = 'y2'; W1.y = 'y11'; W2 = tf(0.1); W2.u = 'u2'; W2.y = 'y12'; S = sumblk('y2 = u1 - y'); P = connect(G,S,W1,W2,{'u1','u2'},{'y11','y12','y2'});
Использовать h2syn для создания контроллера. Эта система имеет один измерительный сигнал и один управляющий сигнал, которые являются последним выходом и входом Pсоответственно.
[K,CL,gamma] = h2syn(P,1,1);
Проверьте полученные формы петель.
L = G*K; S = inv(1+L); T = 1-S; sigmaplot(L,'k-.',S,'r',T,'g') legend('open-loop','sensitivity','closed-loop')

CL - Функция передачи с замкнутым контуромss объект модели | []Функция передачи с замкнутым контуром, возвращаемая как state-space (ss) объект модели или []. Функция передачи с замкнутым контуром CL = lft(P,K) как на следующей схеме.
info - Обобщающие данныеДополнительные данные синтеза, возвращенные в виде структуры. info имеет следующие поля.
| Область | Описание |
|---|---|
X | Решение уравнения Риккати состояния-обратной связи, возвращаемое в виде матрицы. |
Y | Решение уравнения Риккати наблюдателя, возвращаемое в виде матрицы. |
Ku | Коэффициент усиления обратной связи состояния в форме наблюдателя контроллера |
Lx,Lu | Выигрыш наблюдателя от формы наблюдателя контролера |
Preg | Регуляризованная установка, используемая для |
NORMS | Затраты на синтезированный контроллер, возвращаемые в векторе формы
Эти количества связаны |
KFI | Коэффициент усиления обратной связи с полным состоянием информации, возвращаемый в виде матрицы. Полноинформационная проблема предполагает полное знание государства
Для получения дополнительной информации см. раздел 14.8 [1]. |
GFI | Передача полной информации по замкнутому контуру от w к z с контроллером KFI, возвращенный как state-space (ss) модель. Норма H2 GFI является FI. |
HAMX,HAMY | X гамильтонова матрица (обратная связь состояния) и Y гамильтонова матрица (фильтр Калмана). Эти значения приведены для справки, но h2syn не использует их для вычисления решений Riccati. Вместо этого h2syn использует неявные решатели icare и idare. |
h2syn дает вам прирост обратной связи с состоянием и выигрыш наблюдателя, которые вы можете использовать для выражения контроллера в форме наблюдателя. Форма наблюдателя контроллера K является:
Kuxe + Lue.
Здесь инновационным термином e является:
D22u.
h2syn возвращает усиление Ku обратной связи состояния, а наблюдатель получает Lx и Lu в качестве полей в info выходной аргумент.
Эту форму контроллера можно использовать для планирования усиления в Simulink ®. Для этого следует составить таблицу матриц растений и матриц усиления контроллера как функции переменных планирования с использованием блока интерполяции матриц (Simulink). Затем используйте форму наблюдателя контроллера для обновления переменных контроллера по мере изменения переменных планирования.
Не выбирайте функции взвешивания с полюсами, очень близкими к s = 0 (z = 1 для дискретно-временных систем). Например, хотя может показаться разумным выбрать W = 1/s, чтобы принудить нулевую ошибку установившегося состояния, это вводит неустойчивый полюс, который не может быть стабилизирован, вызывая сбой синтеза. Вместо этого выберите W = 1/( s + δ). Значение δ должно быть малым, но не очень малым по сравнению с динамикой системы. Например, для наилучших числовых результатов, если целевая частота пересечения составляет около 1 рад/с, выберите δ = 0,0001 или 0,001. Аналогично, в дискретное время выбирайте время выборки таким образом, чтобы динамика системы и взвешивания была не более чем на десятилетие или два ниже частоты Найквиста.
h2syn использует методы, описанные в главе 14 из [1].
[1] Чжоу, К., Дойл, Дж., Гловер, К, надежный и оптимальный контроль. Река Верхнее Седло, Нью-Джерси: Прентис Холл, 1996.
