Проектирование формирования петель методом Гловера-Макфарлейна
ncfsyn реализует способ проектирования контроллеров, который использует комбинацию формирования контура и надежной стабилизации, как предложено в [1][2]-. Функция вычисляет нормированный контроллер K формирования контура коэффициента коприма Glover-McFarlane H∞ для установки G с весами W1 и W2 предкомпенсатора и посткомпенсатора. Функция предполагает положительную конфигурацию обратной связи на следующем рисунке.
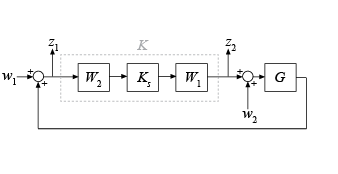
Чтобы задать отрицательную обратную связь, замените G на -G. Контроллер Ks стабилизирует семейство систем, задаваемых шариком неопределенности в нормированных копримовых факторах кумулятивной установки Gs = W2GW1. Конечный контроллер K, возвращенный ncfsyn получают в виде К = W1KsW2.
[ вычисляет контроллер формирования контуров с нормализованным коэффициентом коприма Glover-McFarlane H∞ K,CL,gamma,info] = ncfsyn(G)K для завода G, с W1 = W2 = I. CL - система с замкнутым контуром от возмущений w1 и w2 к выходам z1 и z2. Функция также возвращает производительность H∞ gammaи структуру, содержащую дополнительную информацию о результате.
ncfsynИспользовать ncfsyn разработать контроллер для следующей установки.
G = tf([1 5],[1 2 10]);
Использовать функции взвешивания, позволяющие получить формованный завод W1*G*W2 с высоким коэффициентом усиления для ослабления возмущений ниже 0,1 рад/с и низким коэффициентом усиления для хорошей устойчивой стабильности выше около 5 рад/с. Для этого G, одного веса предварительного компенсатора достаточно.
W1 = tf(1,[1 0]); bodemag(W1*G) grid

Вычислите контроллер.
[K,CL,gamma,info] = ncfsyn(G,W1);
Оптимальная стоимость gamma связан с нормированным запасом остойчивости системы на 1/gamma = ncfmargin(Gs,-Ks). (Знак «минус» необходим, поскольку ncfmargin предполагает цикл отрицательной обратной связи, в то время как ncfsyn вычисляет контроллер положительной обратной связи.)
b = ncfmargin(info.Gs,-info.Ks); [gamma 1/b]
ans = 1×2
1.4508 1.4508
Сравните достигнутые и целевые формы цикла.
sigma(G*K,G*W1) legend('achieved','target')

В то время как ncfmargin предполагает цикл отрицательной обратной связи, ncfsyn команда создает контроллер для цикла положительной обратной связи. Поэтому вычислять запас с помощью контроллера, разработанного с помощью ncfsyn, использовать [marg,freq] = ncfmargin(G,K,+1).
Возвращаемый контроллер K = W1KsW2, где Ks является оптимальным контроллером H∞, который минимизирует стоимость H∞
− KsGs) − 1 [I, Ks] ‖ ∞.
Оптимальная производительность - это минимальные затраты
Ks).
Предположим, что Gs = NM-1, где N (j) * N (j) + M (j) * M (j) = I, является нормализованной параллельной факторизацией (NCF) взвешенной модели растения Gs. Тогда теория гарантирует, что система управления останется прочно стабильной при любых возмущениях, к Gs вида
Δ2) − 1
где Δ1, Δ2 - стабильная пара, удовлетворяющая
∞<MARG:=1γ.
Объект H∞-norm с замкнутым контуром имеет стандартную интерпретацию усиления сигнала. Наконец, можно показать, что контроллер, Ks, по существу не влияет на форму контура на частотах, где коэффициент усиления W2GW1 является либо высоким, либо низким, и гарантирует удовлетворительные пределы стабильности в частотной области пересечения коэффициента усиления. В настройках регулятора окончательный контроллер, который должен быть реализован, - K = W1KsW2.
Для получения дополнительной информации обратитесь к McFarlane и Glover [1] - [2].
[1] Макфарлейн, округ Колумбия, и К. Гловер, надежная конструкция контроллера с использованием нормализованных описаний завода коприм-фактора, Springer Verlag, Lecture Notes in Control and Information Sciences, vol. 138, 1989.
[2] Макфарлейн, округ Колумбия, и К. Гловер, «A Loop Shaping Design Procedure using Synthesis», IEEE Transactions on Automatic Control, vol. 37, no. 6, pp. 759-769, June 1992.
[3] Винникомб, Г., «Измерение надежности систем обратной связи», кандидатская диссертация, инженерный факультет, Кембриджский университет, 1993.
[4] Чжоу, К. и Джей Си Дойл, Основы надежного контроля. Нью-Йорк: Прентис-Холл, 1998.
