Получение текущего времени ROS или системного времени
Панель инструментов ROS/ROS
Блок Current Time выводит текущее ROS или системное время. Время ROS основано на системных часах компьютера или /clock раздел публикуется на узле ROS.
Этот блок используется для синхронизации времени моделирования с подключенным узлом ROS.
Если use_sim_time Параметр ROS имеет значение true, блок возвращает время моделирования, опубликованное на /clock тема. В противном случае блок возвращает системное время машины.
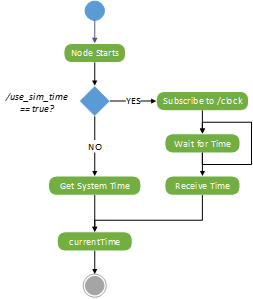
Для установки use_sim_time параметры и получение времени от /clock тема:
Подключитесь к сети ROS, затем используйте блок Set Parameter или задайте параметр в окне команды MATLAB ®:
ptree = rosparam; set(ptree,'/use_sim_time',true)
Обычно узел ROS, публикуемый на /clock раздел устанавливает параметр.

