В этом примере показано, как спроектировать PID-контроллер для системы силовой электроники, смоделированной в Simulink ® с использованием компонентов Simscape™ Electrical™.
Многие системы силовой электроники не могут быть линеаризованы, поскольку они используют высокочастотные коммутационные компоненты, такие как генераторы широтно-импульсной модуляции (ШИМ). Однако большинство инструментов настройки PID Simulink Control Design™ разрабатывают прирост PID на основе линеаризованной модели установки. Чтобы получить такую модель для модели силовой электроники, которая не может быть линеаризована, можно:
Оцените параметры линейной модели установки с помощью программного обеспечения System Identification Toolbox™, как показано в этом примере.
Оценка частотной характеристики установки в диапазоне частот. Пример см. в разделе Design Controller for Power Electronics Model Using Frequency Response Data (Контроллер проектирования для модели силовой электроники с использованием данных частотного отклика).
В этом примере в качестве примера системы силовой электроники используется модель повышающего преобразователя. Схема повышающего преобразователя преобразует одно напряжение постоянного тока в другое, обычно более высокое, напряжение постоянного тока посредством управляемого измельчения или переключения напряжения источника.
mdl = 'scdboostconverter';
open_system(mdl)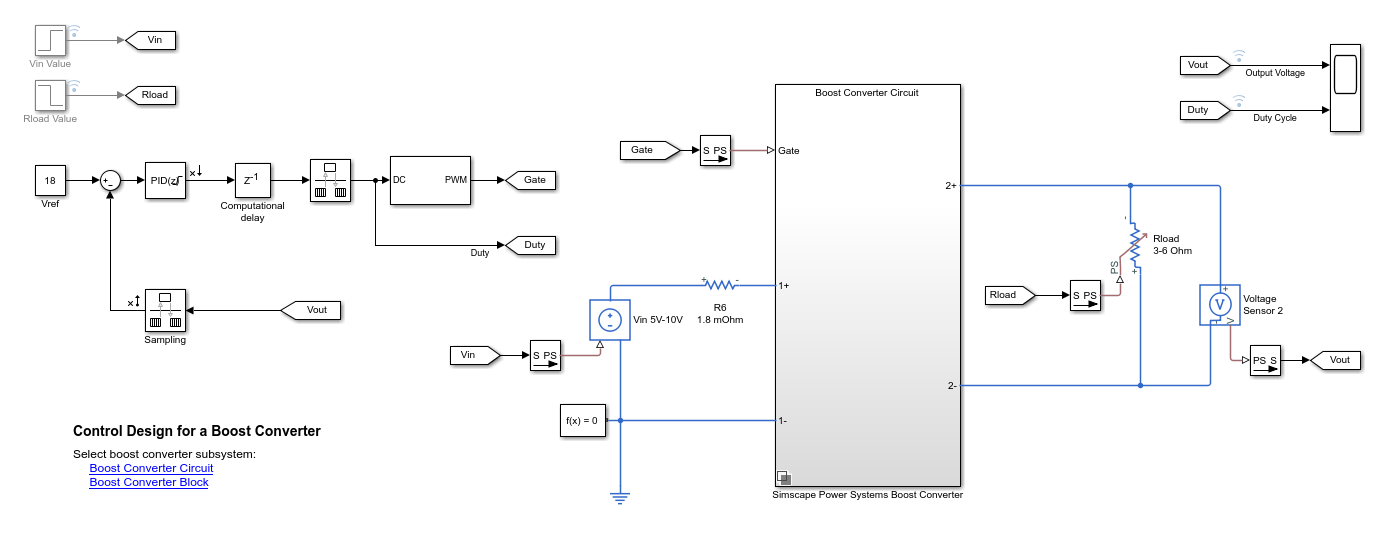
В этой модели для переключения используется МОП-транзистор, управляемый сигналом широтно-импульсной модуляции (ШИМ). Выходное напряжение Vout должно регулироваться до опорного значения Vref. Цифровой контроллер PID регулирует рабочий цикл PWM, Duty, на основе сигнала ошибки напряжения. В этом примере оценивается линейная модель от рабочего цикла ШИМ до напряжения нагрузки Vout.
Программное обеспечение Simscape Electrical содержит заранее определенные блоки для многих систем силовой электроники. Эта модель содержит вариационную подсистему с двумя версиями модели повышающего преобразователя:
Схема бустерного преобразователя, построенная с использованием компонентов электропитания. Параметры компонентов цепи основаны на [1].
Блок повышающего преобразователя, сконфигурированный так, чтобы иметь те же параметры, что и схема повышающего преобразователя. Дополнительные сведения об этом блоке см. в разделе Boost Converter (Simscape Electrical).
Чтобы разработать контроллер для повышающего преобразователя, необходимо сначала определить установившуюся рабочую точку, в которой должен работать преобразователь. Дополнительные сведения о поиске рабочих точек см. в разделе Поиск установившихся рабочих точек для моделей Simscape. В этом примере используется рабочая точка, оцененная по снимку моделирования.
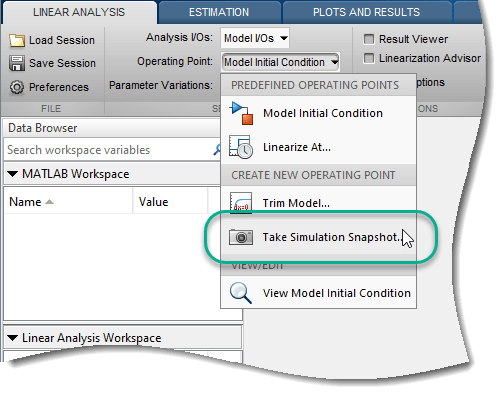
Чтобы найти рабочую точку, используйте линеаризатор модели. Чтобы открыть линеаризатор модели, в окне модели Simulink в галерее Apps щелкните Линеаризатор модели.
В линеаризаторе модели на вкладке Линейный анализ (Linear Analysis) в раскрывающемся списке Рабочая точка (Operating Point) выберите Сделать имитационный снимок (Take Simulation Snapshot).
В диалоговом окне Ввод времени снимка для линеаризации в поле Время снимка моделирования введите 0.045, что является достаточным временем для перехода системы с замкнутым контуром в устойчивое состояние.
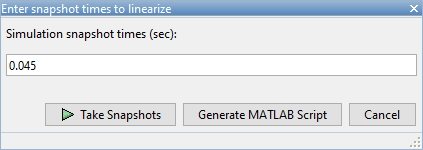
Щелкните Сделать снимки.
Программа моделирует модель и создает рабочую точку, которая содержит входные значения и значения состояния модели в указанное время снимка. Эта рабочая точка, op_snapshot1, добавляется в рабочее пространство линейного анализа.
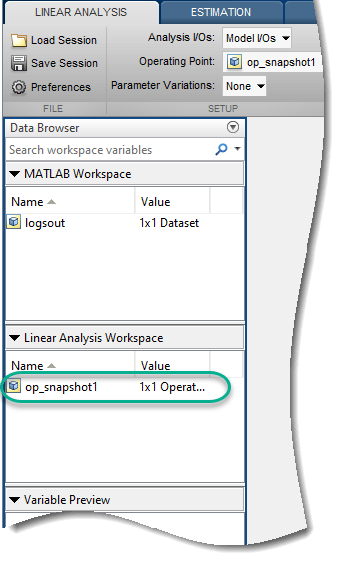
Чтобы инициализировать модель с вычисленной рабочей точкой, дважды щелкните op_snapshot1.
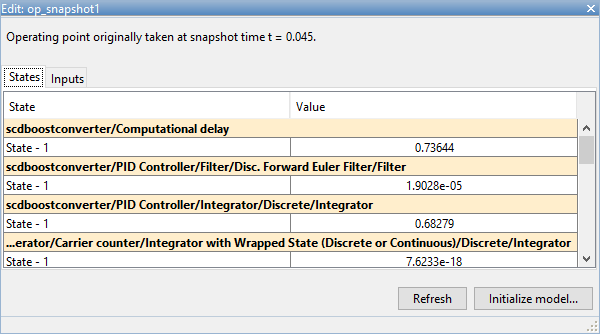
В диалоговом окне Правка (Edit) щелкните Инициализация модели (Initialize model).
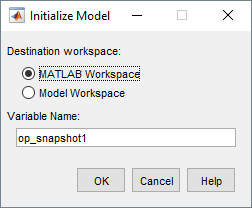
В диалоговом окне Инициализация модели (Initialize Model) выберите Рабочее пространство MATLAB (MATLAB Workspace) и нажмите кнопку ОК. Программа экспортирует рабочую точку в рабочее пространство MATLAB ® и инициализирует модель с входами и состояниями в рабочей точке.
Перед настройкой блока контроллера PID с помощью тюнера PID необходимо указать структуру контроллера. Для этого дважды щелкните блок контроллера. Затем задайте следующие параметры контроллера:
Диспетчер
Форма
Временная область
Настройки дискретного времени
Другие настройки, такие как начальные условия контроллера, уровни насыщения выходных данных и конфигурация защиты от намотки.
В этом примере используется текущая конфигурация контроллера; то есть дискретно-временной ПИД-контроллер параллельной формы без защиты.
С помощью PID Tuner можно настроить параметры следующих блоков контроллера:
Если в модели используется блок Simscape Electrical Discrete PI Controller (Simscape Electrical) или дискретный PI Controller с блоком Integral Anti-Windup (Simscape Electrical), перед настройкой необходимо заменить этот блок блоком Discrete PID Controller.
Чтобы открыть тюнер PID, нажмите кнопку «Настройка». При первом открытии PID-тюнера выполняется попытка линеаризации модели. Благодаря компонентам ШИМ модель аналитически линеаризуется до нуля.
Чтобы получить линейную модель установки, на вкладке «PID Tuner» выберите «Plant», а затем в разделе «Create a New Plant» выберите «Identify New Plant».
Для определения модели завода сначала необходимо получить входные/выходные данные путем моделирования модели. На вкладке Идентификация завода щелкните Получить данные ввода-вывода > Смоделировать данные. Для идентификации завода необходимо указать конечное значение времени остановки модели Simulink.
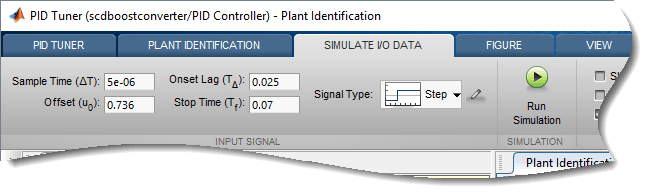
На вкладке Simulate I/O Data настройте входной сигнал с помощью следующих настроек.
Тип сигнала Step.
Время выборки 5e-06.
Начало запаздывания 0.025, что является достаточным временем для того, чтобы завод достиг устойчивого состояния.
Время остановки 0.07, что является достаточным временем для возврата выхода установки в устойчивое состояние после ввода шага.
Смещение 0.736, которое является значением выходного сигнала блока контроллера PID в вычисленной рабочей точке. Для этой модели смещение соответствует значению состояния в блоке Вычислительная задержка. Если в модели отсутствует соответствующее состояние, можно присоединить область к выходу блока PID Controller и смоделировать модель в вычисленной рабочей точке.
Чтобы задать амплитуду шага, щелкните значок. ![]() Затем в диалоговом окне Спецификации ввода шага (Step Input Specifications) в поле Амплитуда (Amplitude) введите
Затем в диалоговом окне Спецификации ввода шага (Step Input Specifications) в поле Амплитуда (Amplitude) введите 0.01. Это значение достаточно велико для достаточного возбуждения системы и достаточно мало для предотвращения перехода контроллера в режим прерывистого тока.
Щелкните Выполнить моделирование (Run Simulation). Для получения входного/выходного отклика установки PID-тюнер вводит указанный входной сигнал на выходе блока PID-контроллера и измеряет соответствующий выходной отклик на входе контроллера. Программное обеспечение выполняет два моделирования, отклик смещения без входного сигнала и входной отклик с входным сигналом. Разница между этими откликами - это выходной отклик.
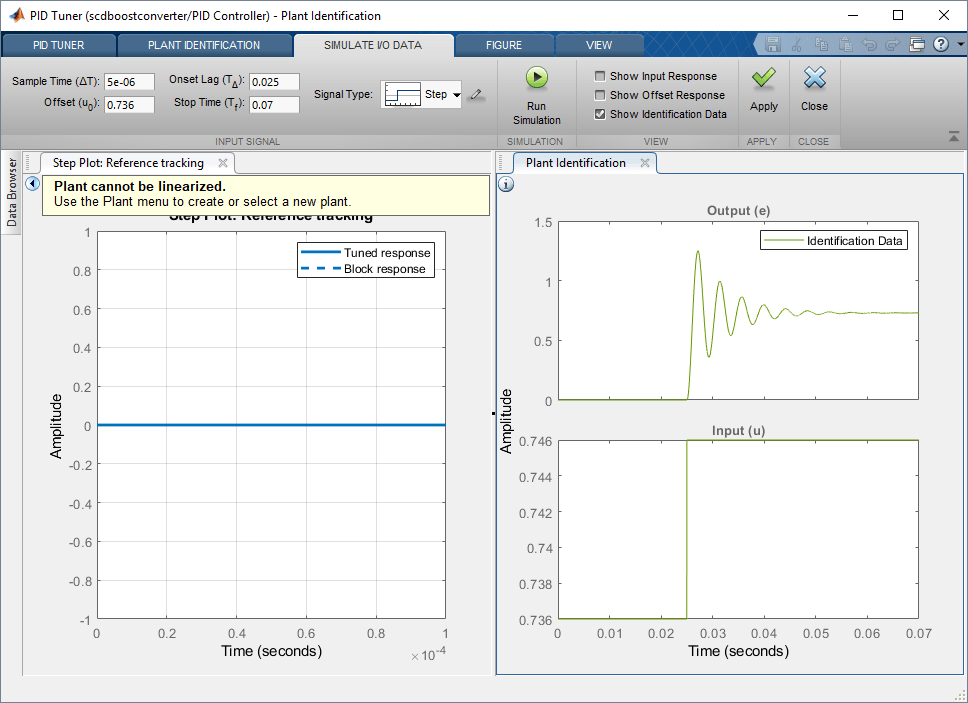
В документе «Идентификация завода» на графике «Вход» отображается указанный входной сигнал, а на графике «Выход» - соответствующий выходной отклик.
Для использования этих смоделированных входных/выходных данных нажмите кнопку Применить. Затем, чтобы закрыть вкладку Simulate I/O Data, нажмите кнопку Close.
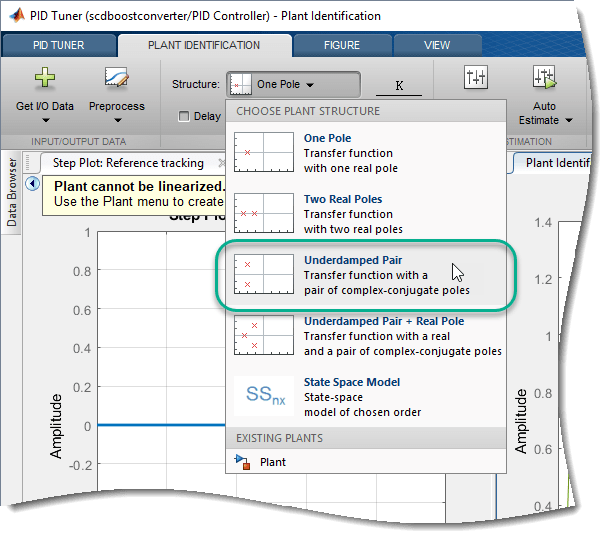
На закладке Plant Identification (Идентификация завода) выберите структуру завода для идентификации на основе знаний о заводе и внешнего вида ответа шага вывода. В этом примере выходной отклик выглядит как недостаточно демпфированный отклик второго порядка. В раскрывающемся списке Структура (Structure) выберите Неполная пара (Underdamped Pair).
Чтобы получить грубую аппроксимацию идентифицированного растения, на графике Идентифицированная структура растения перетащите пунктирные линии, которые соответствуют огибающей ответа шага. Отрегулируйте отклик так, чтобы он аппроксимировал выходной отклик.
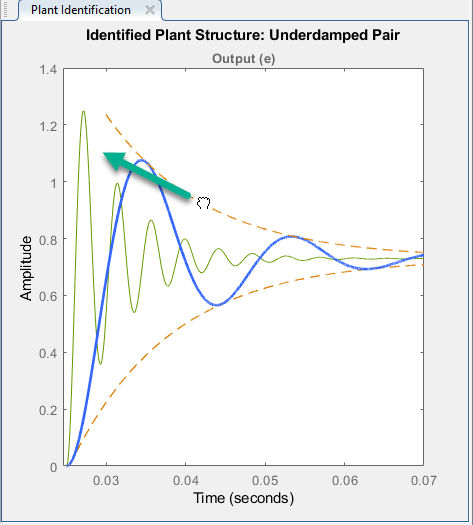
Чтобы точно настроить приблизительный ответ, щелкните Автонанесение (Auto Estimate). Программное обеспечение оценивает параметры идентифицированной модели установки, используя текущие параметры в качестве начального предположения.
В диалоговом окне Plant Identification Progress отображаются результаты процесса оценки. Для этого примера соответствие данным оценки превышает 98%. Для использования этого определенного завода на вкладке Идентификация завода нажмите кнопку Применить.
Тюнер PID обновляет свою идентифицированную модель установки, выбирает параметры контроллера в соответствии с требованиями настройки в разделе «Средства настройки» и отображает настроенный отклик этого контроллера. Чтобы развернуть график, закройте документ «Идентификация завода».
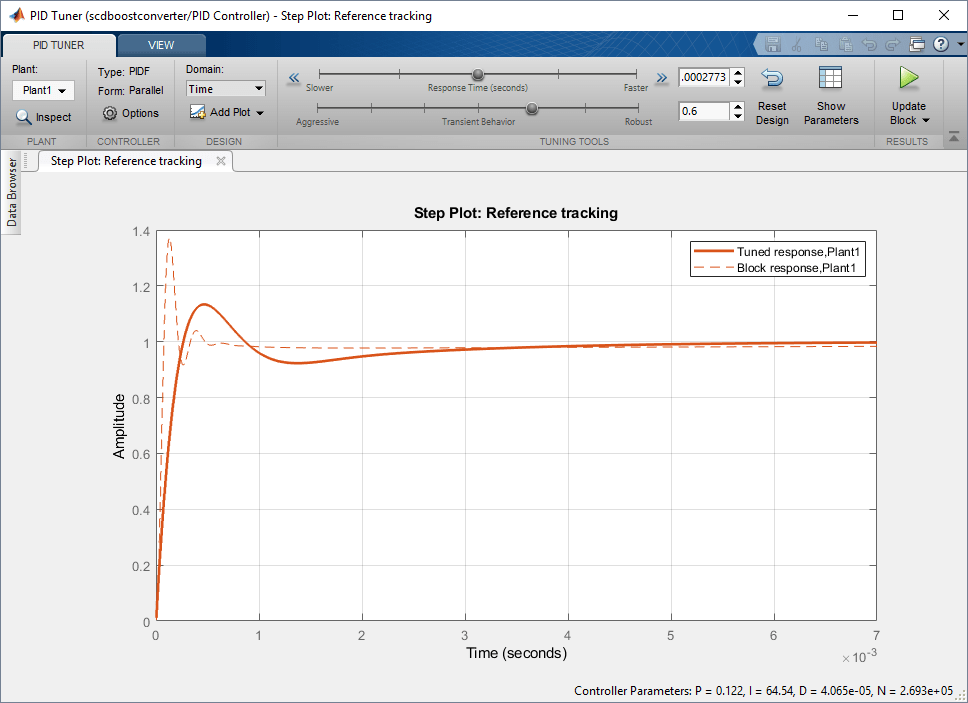
Ответ шага показывает ответ блока (пунктирная линия) и настроенный ответ (сплошная линия). Отклик блока соответствует текущему коэффициенту усиления PID в блоке контроллера PID. Настроенный ответ соответствует настроенному коэффициенту усиления PID в тюнере PID.
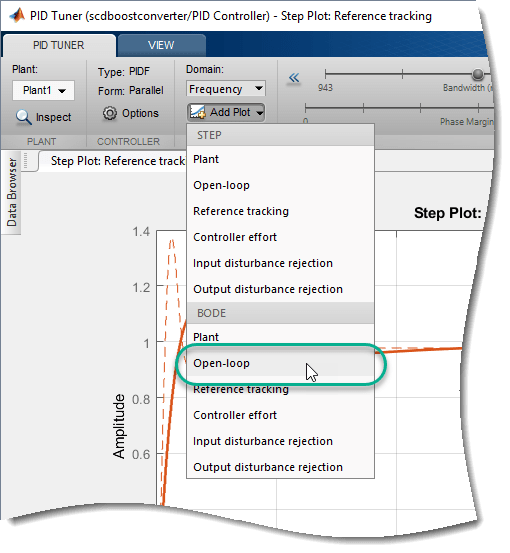
Чтобы настроить контроллер на основе полосы пропускания и запаса по фазе, на вкладке PID Tuner в выпадающем списке Domain выберите Frequency.
В этом примере задайте для параметра Bandwidth and Phase Margin значение 9425 рад/с (1,5 кГц) и 60 град., соответственно, в соответствии с критериями проектирования, указанными в [1].
PID Tuner выбирает параметры контроллера, соответствующие этим проектным спецификациям.
Чтобы просмотреть частотную характеристику настроенной системы, щелкните Добавить график (Add Plot) и в разделе Моде (Bode) щелкните Разомкнутый цикл (Open-loop).
Чтобы скорректировать границы графика Bode, щелкните правой кнопкой мыши область печати и выберите «Свойства». Затем в диалоговом окне «Редактор свойств» на вкладке «Пределы» задайте пределы оси.
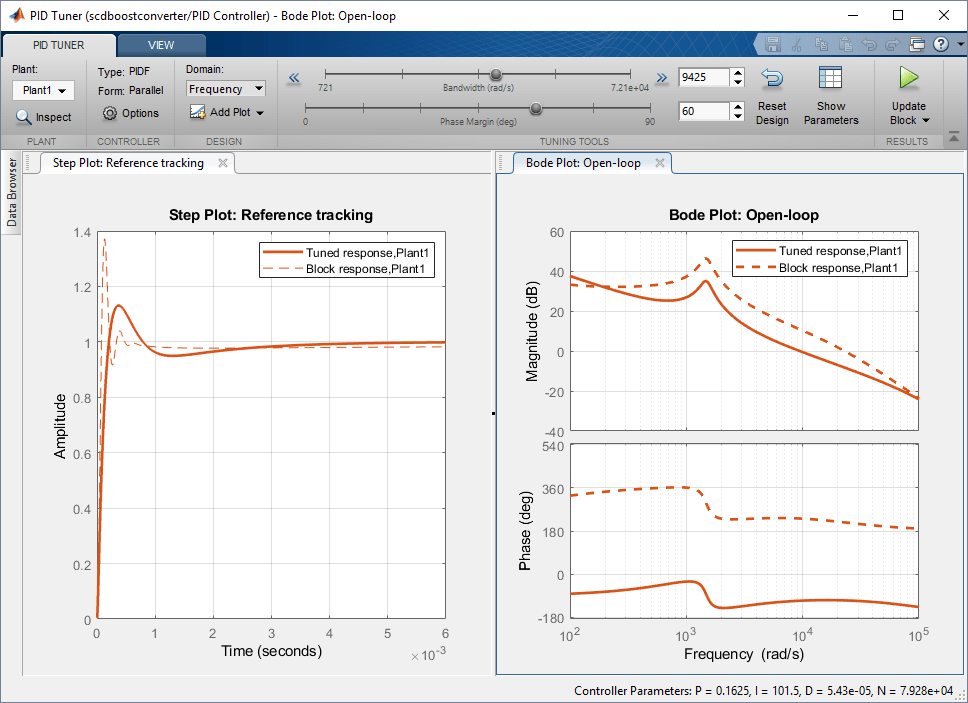
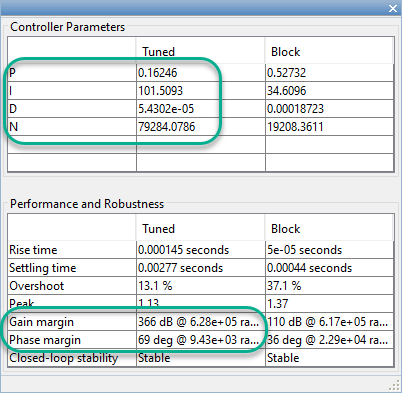
Чтобы просмотреть настроенные параметры контроллера и метрики производительности, включая коэффициенты усиления и поля фазы, щелкните Показать параметры (Show Parameters). Настроенный результат имеет запас усиления 366 дБ и запас фазы 69 ° при 9425 рад/с.
Для обновления блока контроллера PID с помощью настроенных коэффициентов усиления на вкладке «PID Tuner» нажмите «Update Block».
Можно проверить производительность настроенного контроллера с помощью моделирования с возмущениями линии и нагрузки. Для проверки динамических характеристик контроллера в модели Simulink используются следующие возмущения:
Возмущение линии при t = 0,075 с, что увеличивает входное напряжение Vin с 5V до 10V
Нарушение нагрузки при t = 0,1 с, увеличивающее сопротивление нагрузки, Rзагрузка, с 3 Ом до 6 Ом
Моделирование модели.
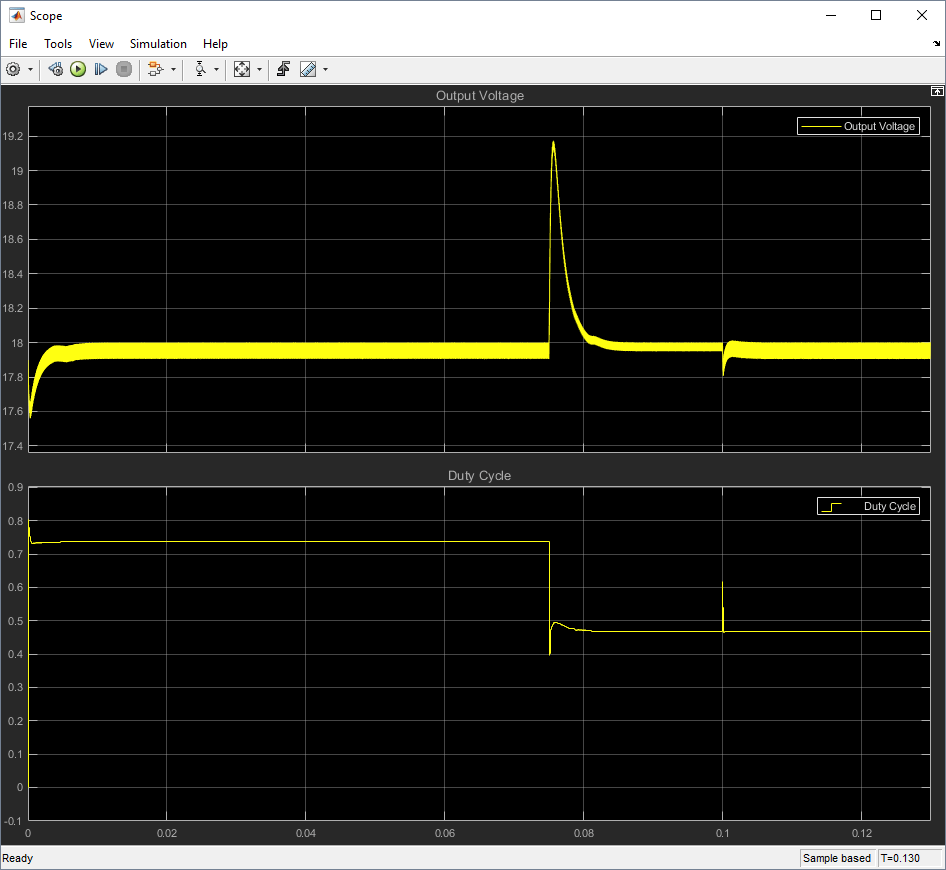
Контроллер хорошо отклоняет помехи линии и нагрузки.
[1] Ли, С. В. «Практический анализ контура обратной связи для повышающего преобразователя в режиме напряжения». Номер отчета по приложению SLVA057. Техасские инструменты. Январь 2014 года. www.ti.com/lit/an/slva633/slva633.pdf
