Обычно динамика системы точно неизвестна и может изменяться. Например, динамика системы может различаться из-за:
Изменения значений параметров, вызванные производственными допусками - например, значение сопротивления резистора обычно находится в диапазоне около номинального значения, 5 Ом +/- 5%.
Условия эксплуатации - например, динамика самолета изменяется в зависимости от высоты и скорости.
Любой контроллер, который вы проектируете для такой системы, должен удовлетворять проектным требованиям для всей потенциальной динамики системы.
Для проектирования контроллера для системы с изменяющейся динамикой:
Пример вариаций.
Создайте модель LTI для каждого образца.
Создайте массив образцов моделей LTI.
Создайте контроллер для номинальной репрезентативной модели из массива.
Проанализируйте конструкцию контроллера для всех моделей в массиве.
Если конструкция контроллера не удовлетворяет требованиям для всех моделей, укажите другую номинальную модель и измените конструкцию контроллера.
В конструкторе систем управления можно указать несколько моделей для любого завода или датчика в текущей архитектуре управления, используя массив моделей LTI (см. Массив моделей). При указании массивов модели для нескольких заводов или датчиков длины массивов должны совпадать.
Чтобы создать массивы для управления многомоделями, можно:
Создание нескольких моделей LTI с помощью tf, ss, zpk, или frd команды.
% Specify model parameters. m = 3; b = 0.5; k = 8:1:10; T = 0.1:.05:.2; % Create an array of LTI models. for ct = 1:length(k); G(:,:,ct) = tf(1,[m,b,k(ct)]); end
Создание массива моделей LTI с помощью stack команда.
% Create individual LTI models. G1 = tf(1, [1 1 8]); G2 = tf(1, [1 1 9]); G3 = tf(1, [1 1 10]); % Combine models in an array. G = stack(1,G1,G2,G3);
Выполните пакетную линеаризацию в нескольких рабочих точках. Затем экспортируйте вычисленные модели LTI для создания массива моделей LTI. См. пример Эталонное отслеживание двигателя постоянного тока с вариациями параметров (Simulink Control Design).
Пример неопределенного состояния-пространства (uss) модель с использованием usample (Надёжная панель инструментов управления).
Вычислить uss модель из модели Simulink ®. Затем использоватьusubs(Панель инструментов надежного управления) или usample (Rustive Control Toolbox) для создания массива моделей LTI. См. раздел Получение модели неопределенного состояния-пространства из модели Simulink (надёжная панель инструментов управления).
Укажите основной блок Simulink для линеаризации в uss(Панель инструментов надежного управления) или ufrd (Надежная панель инструментов управления). См. раздел Определение неопределенной линеаризации для основных или пользовательских блоков симулятора (надёжная панель инструментов управления).
Чтобы импортировать модели в виде массивов, их можно передать в качестве входных аргументов при открытии конструктора систем управления из командной строки MATLAB ®. Дополнительные сведения см. в разделе Конструктор систем управления.
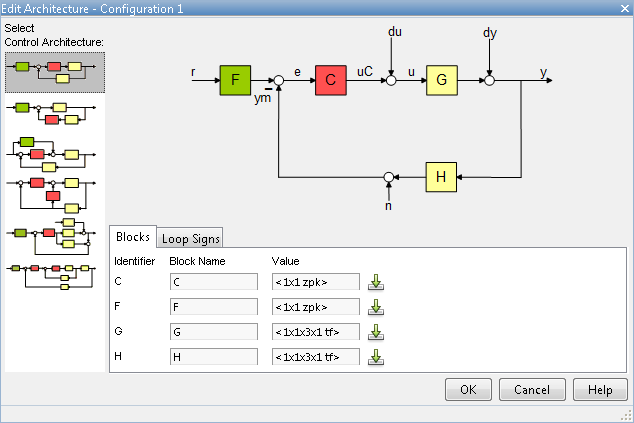
Кроме того, при настройке архитектуры управления можно импортировать массивы моделей в Control System Designer. В диалоговом окне «Редактирование архитектуры»:
В текстовом поле Значение (Value) укажите имя модели LTI в рабочем пространстве MATLAB.
Чтобы импортировать данные блока из рабочей области MATLAB или из MAT-файла в текущей рабочей папке, щелкните значок.![]()
Номинальная модель является репрезентативной моделью в массиве моделей LTI, которые используются для проектирования контроллера в конструкторе систем управления. Используйте редактор и графики анализа для визуализации и анализа влияния контроллера на оставшиеся растения в массиве.
В качестве номинальной модели можно выбрать любую модель в массиве. Например, можно выбрать модель, которая:
Представляет ожидаемую номинальную рабочую точку системы.
Среднее значение моделей в массиве.
Представляет собой наихудший завод.
Лежит ближе всего к точке устойчивости.
Совет
Можно построить график и проанализировать динамику системы с разомкнутым контуром на графике Боде, чтобы определить, какую модель выбрать в качестве номинальной.
Чтобы выбрать номинальную модель из массива моделей LTI, в конструкторе систем управления щелкните Конфигурация мультимодели (Multimodel Configuration). Затем в диалоговом окне Конфигурация мультимодели (Multimodel Configuration) выберите индекс номинальной модели. Индекс по умолчанию: 1.
Для каждого завода или датчика, определенного как массив моделей, приложение выбирает модель с указанным индексом в качестве номинальной модели. В противном случае приложение использует скалярное расширение для применения одной модели LTI ко всем индексам модели.
Например, для следующей архитектуры управления:
если G и H являются как трехэлементными массивами, так и номинальным индексом модели 2, программное обеспечение использует второй элемент в обоих массивах для вычисления номинальной модели:

Номинальный отклик от r до y равен:
CG2H2
Приложение также вычисляет и строит графики ответов, показывающих влияние C на оставшиеся пары моделей растений и датчиков - G1H1 и G3H3.
Если только G является массивом моделей LTI, а указанная номинальная модель равна 2, то архитектура управления для номинального отклика равна:

В этом случае номинальный отклик от r до y равен:
CG2H
Приложение также вычисляет и строит графики ответов, показывающих влияние C на оставшиеся пары растительной и сенсорной модели - G1H и G3H.
Частотная характеристика системы вычисляется в последовательности частотных значений, называемых частотной сеткой. По умолчанию Control System Designer вычисляет логарифмически равномерно разнесенную сетку на основе динамического диапазона каждой модели в массиве.
Укажите пользовательскую частотную сетку, если:
Автоматическая сетка имеет больше точек, чем требуется. Для повышения эффективности вычислений задайте менее плотный интервал между сетками.
Автоматическая сетка не является достаточно плотной в конкретном диапазоне частот. Например, если отклик не фиксирует резонансную пиковую динамику системы с пониженным демпфированием, укажите более плотную сетку вокруг угловой частоты.
Вы заинтересованы только в отклике в определенных диапазонах частот. Чтобы повысить вычислительную эффективность, укажите сетку, которая охватывает только интересующие диапазоны частот.
Дополнительные сведения о задании логарифмически разнесенных векторов см. в разделе logspace.
Примечание
Изменение частотной сетки не влияет на вычисление частотной характеристики для номинальной модели. Приложение всегда использует параметр автоматического выбора для вычисления номинальной частотной характеристики модели.
В этом примере показано, как спроектировать компенсатор для набора моделей завода с помощью конструктора систем управления.
Создание массива моделей растений
Создайте массив моделей завода LTI с помощью stack команда.
% Create an array of LTI models to model plant (G) variations.
G1 = tf(1,[1 1 8]);
G2 = tf(1,[1 1 9]);
G3 = tf(1,[1 1 10]);
G = stack(1,G1,G2,G3);
Создание массива моделей датчиков
Аналогично, создайте массив моделей датчиков.
H1 = tf(1,[1/0.1,1]); H2 = tf(1,[1/0.15,1]); H3 = tf(1,[1/0.2,1]); H = stack(1,H1,H2,H3);
Конструктор открытых систем управления
Откройте конструктор систем управления и импортируйте массивы моделей установок и датчиков.
controlSystemDesigner(G,1,H)
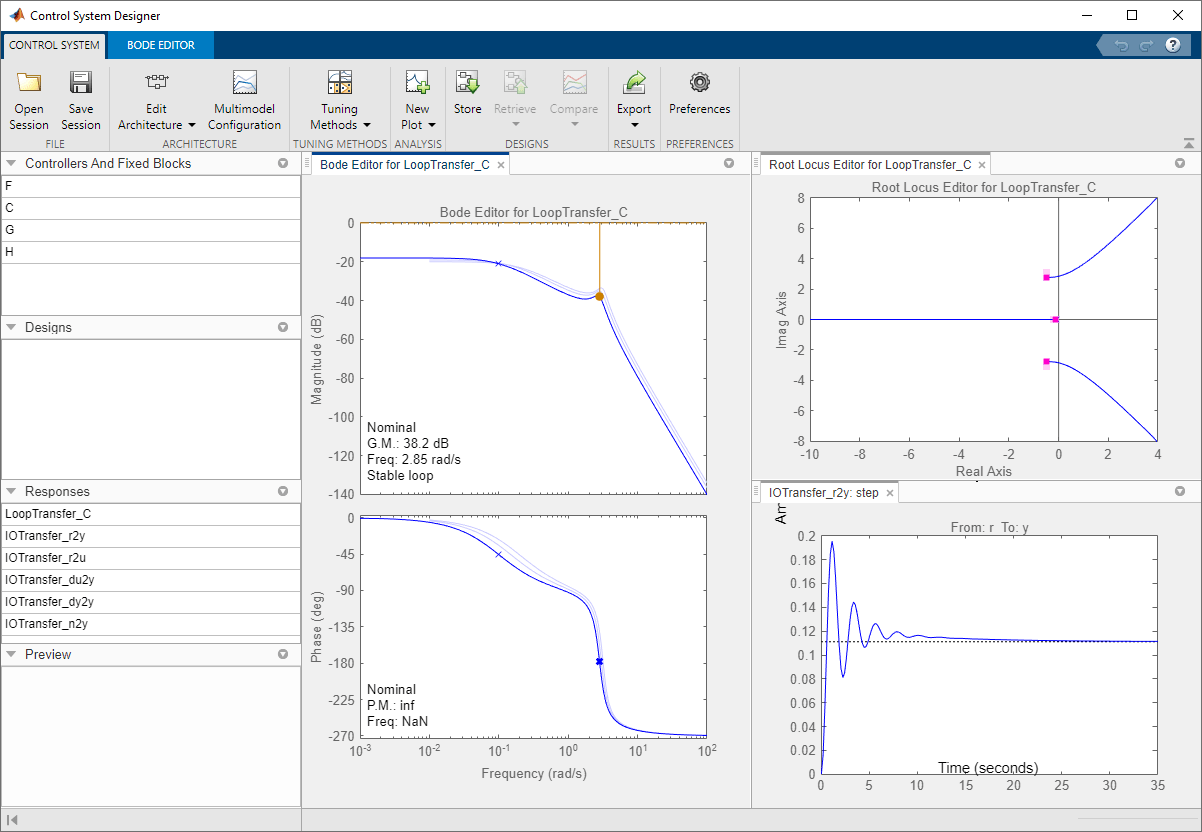
Приложение открывает и импортирует массивы моделей установок и датчиков.
Настройка графика анализа
Чтобы просмотреть отклик шага с замкнутым контуром на более крупном графике, в конструкторе систем управления щелкните маленькую стрелку раскрывающегося списка на графике IOTransfer_r2y: step, а затем выберите Maximize.

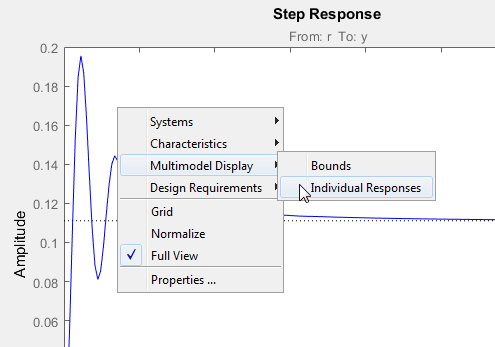
По умолчанию в отклике шага отображается только номинальный отклик. Чтобы отобразить отдельные ответы для других индексов модели, щелкните правой кнопкой мыши область графика и выберите «Конфигурация мультимодели» > «Индивидуальные ответы».
Примечание
Чтобы просмотреть оболочку всех ответов модели, щелкните правой кнопкой мыши область печати и выберите «Конфигурация мультимодели» > «Границы».
График обновляется для отображения откликов для других моделей.

Выбор номинальной модели
На вкладке Система управления (Control System) щелкните Конфигурация мультимодели (Multimodel Configuration).
В диалоговом окне Конфигурация мультимодели (Multimodel Configuration) укажите номинальный индекс модели (Nominal Model Index), равный 2.
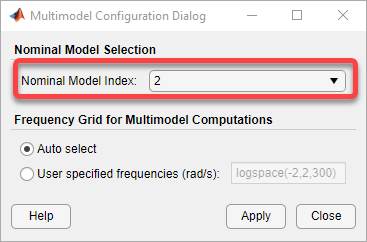
Щелкните Закрыть (Close).
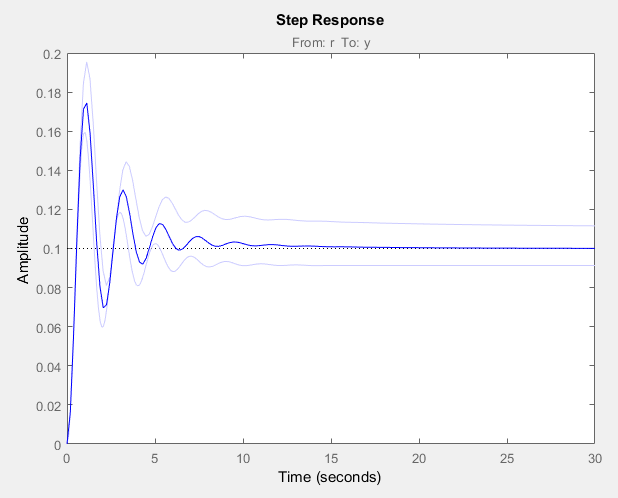
Выбранная номинальная модель соответствует среднему отклику системы.
Расчетный компенсатор
Для проектирования компенсатора с использованием номинальной модели можно использовать любой из поддерживаемых методов настройки конструктора систем управления.
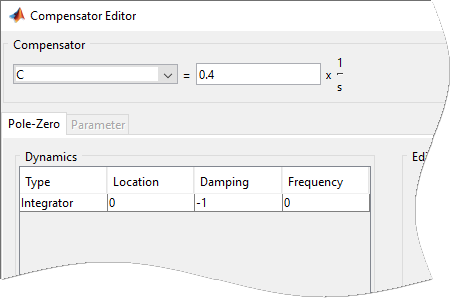
В этом примере редактор компенсаторов используется для задания динамики компенсатора вручную. Добавьте интегратор к компенсатору и установите коэффициент усиления компенсатора равным 0.4. Дополнительные сведения см. в разделе Правка компенсатора Dynamics.
Анализ результатов
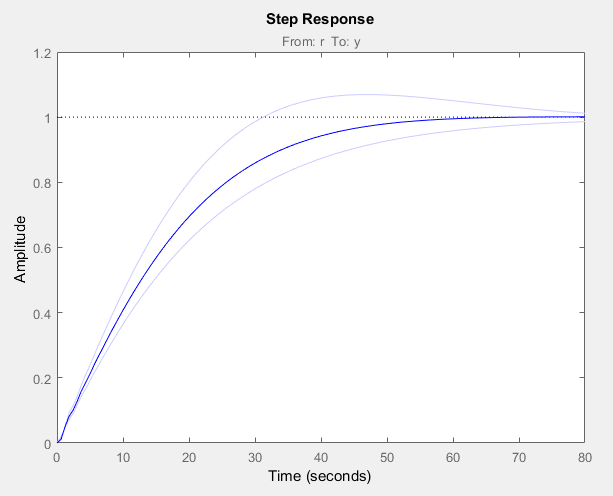
Настроенный контроллер выдает отклик на шаг с минимальным превышением для номинальных моделей и наихудшим превышением менее 10%.
Конструктор системы управления
