Обновление функций графика полетного журнала БПЛА
updatePlot( добавляет или обновляет график с именем mapper,plotName,plotFunc,requiredSignals)plotName хранится в mapper. Укажите функцию графика как предопределенное имя графика или дескриптор функции и требуемые сигналы для графика. Список предварительно настроенных сигналов и графиков см. в разделах Предопределенные сигналы и Предопределенные графики.
После отображения сигналов в список предварительно определенных сигналов с помощью mapSignal, конкретные участки становятся доступными при вызове show. Чтобы просмотреть список доступных графиков и связанных с ними сигналов для конкретного объекта, вызовите info(mapper,"Plot"). Если требуется определить пользовательские графики на основе сигналов, используйте updatePlot.
Каждый предопределенный график имеет набор требуемых сигналов, которые должны быть отображены.
Предопределенные графики
| График | Описание | Сигналы |
|---|---|---|
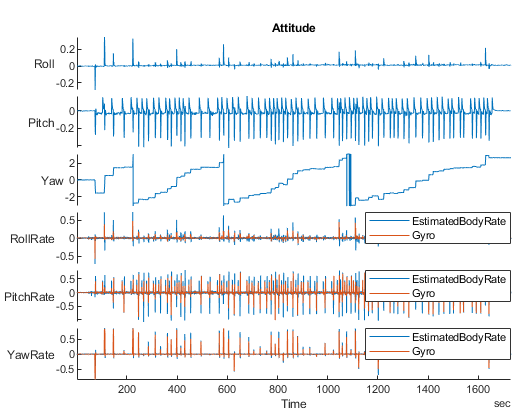
| Составленный график крена, тангажа, углов рыскания и скоростей вращения кузова | AttitudeEuler, AttitudeRate, Gyro# |
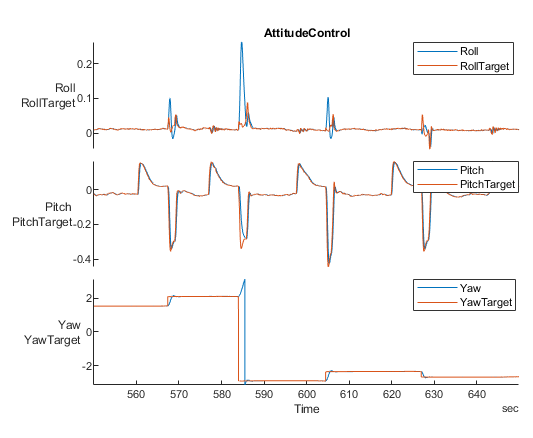
| Расчетное положение БПЛА и уставка цели положения | AttitudeEuler, AttitudeTargetEuler |
| График потребления батареи | Battery |
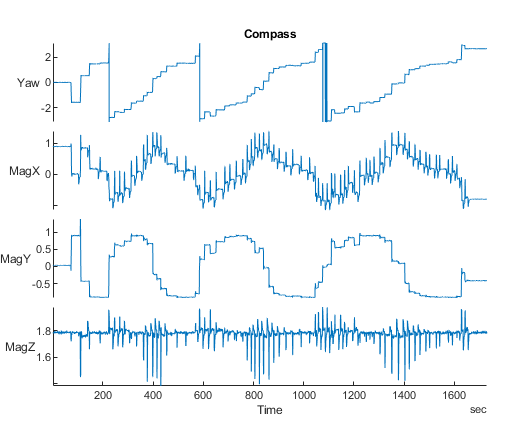
| Расчетные показания рыскания и магнитометра | AttitudeEuler, Mag#, GPS# |
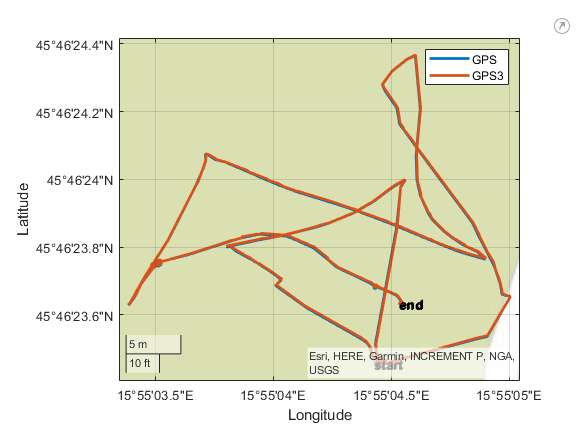
| Необработанный график Lat-Lon для показаний GPS-датчика. | GPS# |
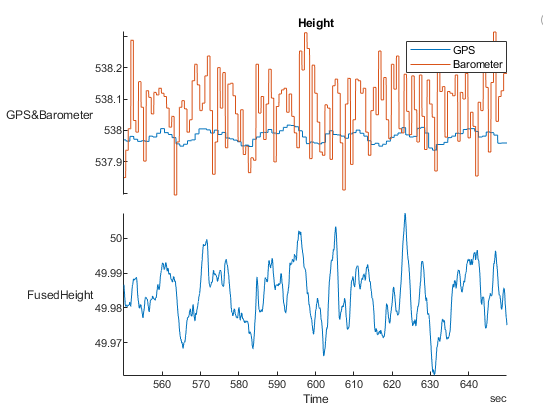
| Составленные графики показаний барометра, показаний высоты GPS и оценки высоты предохранителя | Barometer#, GPS#, LocalNED |
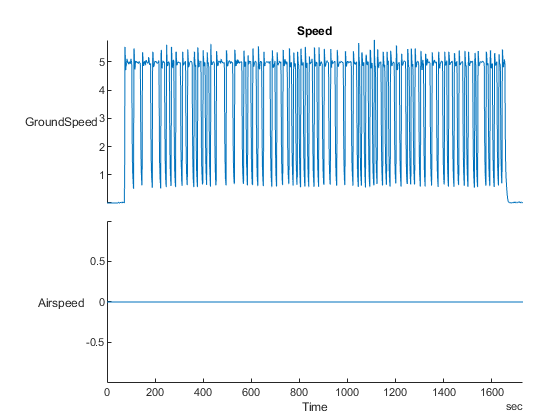
| Составленный график наземной скорости и скорости воздуха | GPS#, Airspeed# |
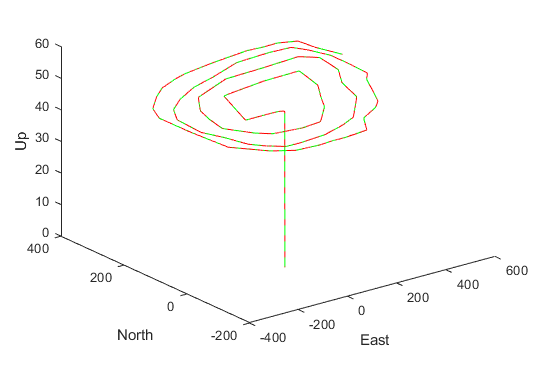
| Траектория в локальных координатах по сравнению с целевыми уставками | LocalNED, LocalNEDTarget |
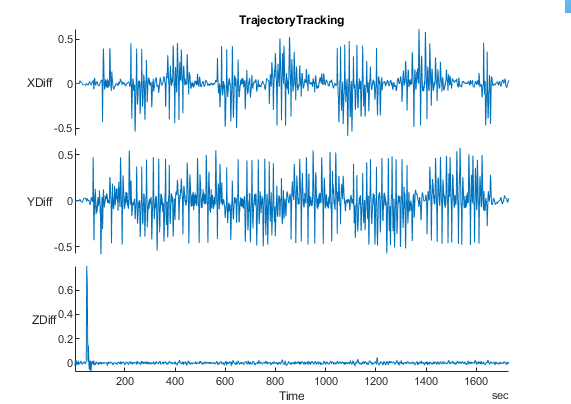
| Ошибка между требуемым и фактическим положением в координатах NED | LocalNED, LocalNEDTarget |
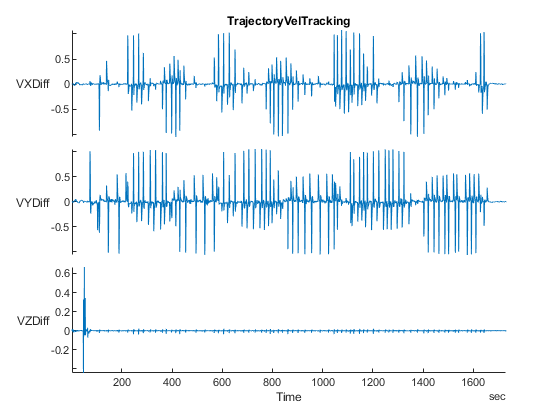
| Ошибка между требуемой и фактической скоростью в координатах NED | LocalNEDVel, LocalNEDVelTarget |
extract | flightLogSignalMapping | info | mapSignal | mavlinktlog | show