Графический анализ циклов обратной связи MIMO
loopview(G,C)
loopview(G,C,info)
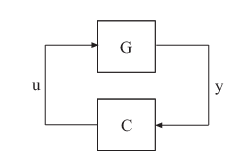
loopview( строит графики характеристик следующего цикла обратной связи с положительной обратной связью, с мультивходами, с несколькими выходами (MIMO) с G,C)G объекта и C контроллера.
Использовать loopview для анализа эффективности настроенной системы управления, которую вы получаете используя looptune.
Примечание
Если вы настраиваете Simulink® модель с looptune через slTuner интерфейс, анализируйте эффективность вашей системы управления с помощью loopview (Simulink Control Design) для slTuner (требует Simulink Control Design™).
loopview строит графики сингулярных значений:
Частотные характеристики без разомкнутого контура G*C и C*G
Функции чувствительности S = inv(1-G*C) и дополнительная чувствительность T = 1-S
Максимальный (целевой), фактический (настроенный) и нормализованные запасы устойчивости MIMO. loopview строит графики полей диска с мультициклами (см. Анализ устойчивости с использованием полей диска (Robust Control Toolbox)). Используйте этот график, чтобы убедиться, что запасы устойчивости настроенной системы не значительно превышают целевое значение.
Для получения дополнительной информации о сингулярных значениях см. sigma.
loopview( использует G,C,info)info структура, возвращенная looptune. Этот синтаксис также строит графики целевых и настроенных значений ограничений настройки, наложенных на систему. Дополнительные графики включают:
Сингулярные значения максимально допустимого S и T. Кривая отмечена S/T Max показывает максимально допустимое S на низкочастотной стороне графика и максимально допустимой T на высокочастотной стороне. Эти кривые являются ограничениями, которые looptune накладывает на S и T для принудительного применения целевой области значений пересечения wc.
Целевые и настроенные значения ограничений, накладываемых любыми требованиями к цели настройки, которые вы использовали с looptune.
Использовать loopview с info структура для помощи в устранении неполадок, когда настройка не соответствует всем требованиям.
|
Числовая модель LTI или настраиваемая Можно получить |
|
Можно получить |
|
|
Для анализа моделей Simulink, настроенных на looptune через slTuner (Simulink Control Design) интерфейс, использование loopview (Simulink Control Design) для slTuner (требует Simulink Control Design).
looptune | looptune (for
slTuner) (Simulink Control Design) | loopview (for
slTuner) (Simulink Control Design) | slTuner (Simulink Control Design)
