Постройте моделируемую временную характеристику динамической системы на произвольные входы; симулированные отклики
lsim( строит графики моделируемой временной характеристики динамической модели системы
syssys,u,t) в историю входов (t, u). Векторная t задает временные выборки для симуляции. Для систем с одним входом входной сигнал u - вектор той же длины, что и t. Для мультивходов, u массив с таким количеством строк, сколько существует временных выборок (length(t)) и столько столбцов, сколько входов для sys.
lsim( моделирует отклики нескольких динамических систем на одну и ту же историю входных параметров и строит графики этих откликов на одной фигуре. Все системы должны иметь одинаковое количество входов и выходов. Можно также использовать sys1,sys2,...,sysN,u,t,___)x0 и method входные параметры при вычислении откликов нескольких моделей.
y = lsim(sys,u,t)y, отобранные в одно и то же время t как вход. Для систем с одним выходом, y - вектор той же длины, что и t. Для мультивыходов, y массив, имеющий столько строк, сколько временных выборок (length(t)) и столько столбцов, сколько выходов в sys. Этот синтаксис не генерирует график.
[ возвращает траектории состояний y,tOut,x] = lsim(___)x, когда sys является моделью пространства состояний. x массив с таким количеством строк, сколько существует временных выборок и столько столбцов, сколько состояний в sys. Этот синтаксис также возвращает временные выборки, используемые для симуляции в tOut.
lsim( открывает инструмент линейной симуляции. Для получения дополнительной информации об использовании этого инструмента для линейного анализа см. Раздел «Работа с инструментом линейной симуляции».sys)
Рассмотрите следующую передаточную функцию.
sys = tf(3,[1 2 3])
sys =
3
-------------
s^2 + 2 s + 3
Continuous-time transfer function.
Чтобы вычислить ответ этой системы на произвольный входной сигнал, предоставьте lsim с вектором времени t при котором необходимо вычислить ответ и вектор u содержащих соответствующие значения сигналов. Для образца постройте график отклика системы к шаговому сигналу, который начинается с 0 в момент времени t = 0, пандусы от 0 в t = 1 до 1 в t = 2, и затем держится стабильно при 1. Определите t и вычислите значения u.
t = 0:0.04:8; % 201 points
u = max(0,min(t-1,1));Использование lsim без выходного аргумента для построения графика отклика системы к сигналу.
lsim(sys,u,t)
grid on
На график показан приложенный вход (u,t) серым цветом и системной характеристикой синего цвета.
Использование lsim с выходным аргументом для получения симулированного отклика данных.
y = lsim(sys,u,t); size(y)
ans = 1×2
201 1
Векторная y содержит симулированный отклик в соответствующее время в t.
Использование gensig создание периодических входных сигналов, таких как синусоиды и квадратные волны для использования с lsim. Симулируйте ответ на квадратную волну следующей модели пространства состояний SISO.
A = [-3 -1.5; 5 0]; B = [1; 0]; C = [0.5 1.5]; D = 0; sys = ss(A,B,C,D);
В данном примере создайте квадратную волну с периодом 10 с и длительностью 20 с.
[u,t] = gensig("square",10,20);gensig возвращает вектор t временных шагов и вектора u содержащий соответствующие значения входного сигнала. (Если вы не задаете шаг расчета для t, затем gensig генерирует 64 выборки за период.) Используйте их с lsim и постройте график отклика системы.
lsim(sys,u,t)
grid on
На график показана приложенная квадратная волна серого цвета и отклика системы синего цвета. Функции lsim с выходным аргументом для получения значений отклика в каждой точке в t.
[y,~] = lsim(sys,u,t);
Когда вы симулируете ответ системы дискретного времени, временной вектор t должен иметь форму Ti:dT:Tf, где dT - шаг расчета модели. Симулируйте ответ следующей передаточной функции в дискретном времени на вход шага наклона.
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
Эта передаточная функция имеет шаг расчета 0,05 с. Используйте тот же шаг расчета, чтобы сгенерировать временной вектор t и усиленный сигнал шага u.
t = 0:0.05:4; u = max(0,min(t-1,1));
Постройте график отклика системы.
lsim(sys,u,t)

Чтобы симулировать ответ системы в дискретном времени на периодический входной сигнал, используйте тот же шаг расчета с gensig чтобы сгенерировать вход. Для образца симулируйте отклик системы к синусоиде с периодом 1 с и длительностью 4 с.
[u,t] = gensig("sine",1,4,0.05);Постройте график отклика системы.
lsim(sys,u,t)

lsim позволяет вам построить график симулированных откликов нескольких динамических систем на одной оси. Для образца сравните реакцию системы с обратной связью с ПИ-контроллером и ПИД-регулятором. Создайте передаточную функцию системы и настройте контроллеры.
H = tf(4,[1 10 25]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Сформируйте системы с обратной связью.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1);
Постройте график откликов обеих систем на квадратную волну с периодом 4 с.
[u,t] = gensig("square",4,12); lsim(sys1,sys2,u,t) grid on legend("PI","PID")

По умолчанию lsim выбирает различные цвета для каждой системы, которую вы строите. Вы можете задать цвета и стили линии, используя LineSpec входной параметр.
lsim(sys1,"r--",sys2,"b",u,t) grid on legend("PI","PID")

Первый LineSpec «r--" задает штриховую красную линию для отклика с ПИ-контроллером. Вторая LineSpec «b" задает сплошную синюю линию для отклика с ПИД-регулятором. Легенда отражает указанные цвета и стили линии. Для получения дополнительных опций индивидуальной настройки графика используйте lsimplot.
В системе MIMO в каждый временной шаг t, а вход u(t) - вектор, длина которого является количеством входов. Как использовать lsim, вы задаете u как матрица с размерностями Nt-by- Nu, где Nu количество системных входов и Nt - длина t. Другими словами, каждый столбец u - входной сигнал, приложенный к соответствующему системному входу. Например, чтобы симулировать систему с четырьмя входами для 201 временного шага, предоставьте u как матрица четырех столбцов и 201 строка, где каждая строка u(i,:) - вектор входа значений в i1й временной шаг; каждый столбец u(:,j) - сигнал, приложенный к jth-й вход.
Точно так же выходные y(t) вычисляется по lsim является матрицей, столбцы которой представляют сигнал на каждом выходе системы. Когда вы используете lsim для построения графика симулированного отклика, lsim предоставляет отдельные оси для каждого выхода, представляющие отклику системы в каждом канале выхода к входу u(t) применяется на всех входах.
Рассмотрим модель пространства состояний с двумя входами, тремя выходами со следующими матрицами пространства состояний.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.5 -0.1;
0.35 -0.1 -0.15
0.65 0 0.6];
D = [ 0.5 0;
0.05 0.75
0 0];
sys = ss(A,B,C,D);Постройте график отклика sys к квадратной волне периода 4 с, приложенной к первому входу sys и импульс, приложенный ко второму входу каждые 3 с. Для этого создайте векторы-столбцы, представляющую квадратную волну и импульсный сигнал, используя gensig. Затем сложите столбцы в матрицу входа. Чтобы убедиться, что два сигнала имеют одинаковое количество выборок, задайте одно и то же время окончания и шаг расчета.
Tf = 10; Ts = 0.1; [uSq,t] = gensig("square",4,Tf,Ts); [uP,~] = gensig("pulse",3,Tf,Ts); u = [uSq uP]; lsim(sys,u,t)

Каждая ось показывает ответ одного из трех системных выходов на сигналы u применяется на всех входах. Каждый график также показывает все входные сигналы в сером цвете.
По умолчанию lsim моделирует модель, предполагая, что все состояния равны нулю в начале симуляции. При симуляции отклика модели пространства состояний используйте необязательную x0 входной параметр для задания ненулевых значений начального состояния. Рассмотрим следующую модель пространства состояний SISO в двух состояниях.
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);Предположим, что вы хотите разрешить системе развиваться из известного набора начальных состояний без входов в течение 2 с, а затем применить единичное изменение шага. Задайте вектор x0 начальных значений состояний и создайте вектор входа.
x0 = [-0.2 0.3];
t = 0:0.05:8;
u = zeros(length(t),1);
u(t>=2) = 1;
lsim(sys,u,t,x0)
grid on
Первая половина графика показывает свободное развитие системы от начальных значений состояния [-0.2 0.3]. В t = 2 существует изменение шага на входе, и график показывает отклик системы к этому новому сигналу, начиная со значений состояния в то время.
Когда вы используете lsim с выходными аргументами он возвращает симулированному отклику данные в массив. Для системы SISO данные отклика возвращаются как вектор-столбец той же длины, что и t. Например, извлеките ответ системы SISO на квадратную волну. Создайте квадратную волну с помощью gensig.
sys = tf([2 5 1],[1 2 3]);
[u,t] = gensig("square",4,10,0.05);
[y,t] = lsim(sys,u,t);
size(y)ans = 1×2
201 1
Векторная y содержит симулированный отклик на каждом временном шаге в t. (lsim возвращает временной вектор t как удобство.)
Для системы MIMO данные отклика возвращаются в массиве размерностей N-на-Ny-на-Nu, где Ny и Nu являются количеством выходов и входов динамической системы. Например, рассмотрим следующую модель пространства состояний, представляющую систему с тремя состояниями с двумя входами и тремя выходами.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.1 -0.2;
0.7 -0.2 -0.3
-0.65 0 -0.6];
D = [ 0.1 0;
0.1 1.5
0 0];
sys = ss(A,B,C,D);Извлеките отклики трех выходных каналов на квадратную волну, приложенную к обоим входам.
uM = [u u]; [y,t] = lsim(sys,uM,t); size(y)
ans = 1×2
201 3
y(:,j) - вектор-столбец, содержащая ответ на j-ом выходе на квадратную волну, приложенную к обоим входам. То есть y(i,:) является вектором трех значений, выходных значений в i-м временном шаге.
Потому что sys является моделью пространства состояний, можно извлечь временное развитие значений состояний в ответ на входной сигнал.
[y,t,x] = lsim(sys,uM,t); size(x)
ans = 1×2
201 3
Каждая строка x содержит значения состояний [x1,x2,x3] в соответствующее время в t. Другими словами, x(i,:) - вектор состояния в i-м временном шаге. Постройте график значений состояния.
plot(t,x)

Пример Plot Response of Multiple Systems to Same Input показывает, как построить график откликов нескольких отдельных систем на одной оси. Когда у вас есть несколько динамических систем, расположенных в массиве моделей, lsim строит графики всех их ответов сразу.
Создайте массив моделей. В данном примере используйте одномерный массив передаточных функций второго порядка, имеющих различные собственные частоты. Во-первых, предварительно выделите память для массива моделей. Следующая команда создает 1 на 5 строку передаточных функций SISO с нулевым усилением. Первые две размерности представляют выходы модели и входы. Оставшиеся размерности являются измерениями массива. (Для получения дополнительной информации об массивах моделей и их создании см. раздел «Массивы моделей».)
sys = tf(zeros(1,1,1,5));
Заполните массив.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
Постройте график откликов всех моделей в массиве на вход квадратной волны.
[u,t] = gensig("square",5,15);
lsim(sys,u,t)
lsim использует тот же стиль линии для откликов всех записей массива. Один из способов различить записи - использовать SamplingGrid свойство динамических моделей системы связывать каждую запись в массиве с соответствующим w0 значение.
sys.SamplingGrid = struct('frequency',w0);Теперь, когда вы строите график характеристик в графическом окне MATLAB, можно щелкнуть трассировку, чтобы увидеть, какому значению частоты это соответствует.
Данные оценки нагрузки для оценки модели.
load(fullfile(matlabroot,'toolbox','ident','iddemos','data','dcmotordata')); z = iddata(y,u,0.1,'Name','DC-motor');
z является iddata объект, который сохраняет данные оценки с одним входом с двумя выходами со шаг расчета 0,1 с.
Оцените модель пространства состояний порядка 4, используя данные оценки z.
[sys,x0] = n4sid(z,4);
sys является оценочной моделью и x0 - предполагаемые начальные состояния.
Симулируйте ответ sys использование тех же входных данных, что и для оценки, и начальных состояний, возвращенных командой оценки.
[y,t,x] = lsim(sys,z.InputData,[],x0);
Здесь, y является отклик системы, t - временной вектор, используемая для симуляции, и x - траектория состояний.
Сравните симулированный отклик y в измеренный отклик z.OutputData для обоих выходов.
subplot(211), plot(t,z.OutputData(:,1),'k',t,y(:,1),'r') legend('Measured','Simulated') subplot(212), plot(t,z.OutputData(:,2),'k',t,y(:,2),'r') legend('Measured','Simulated')

Выбор шага расчета может резко повлиять на результаты симуляции. Чтобы проиллюстрировать, почему, рассмотрите следующую модель второго порядка.
Симулируйте реакцию этой модели на квадратную волну с периодом 1 с, используя шаг расчета 0,1 с.
w2 = 62.83^2;
sys = tf(w2,[1 2 w2]);
tau = 1;
Tf = 5;
Ts = 0.1;
[u,t] = gensig("square",tau,Tf,Ts);
lsim(sys,u,t)
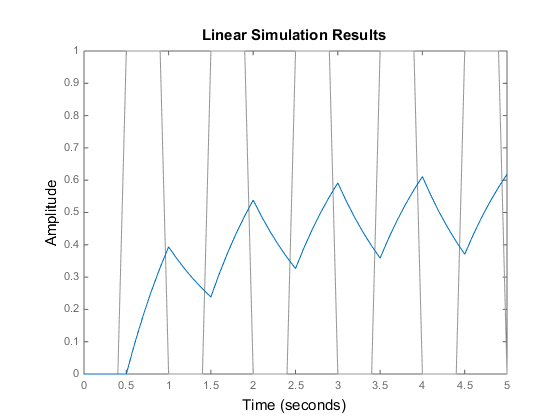
lsim моделирует модель с помощью заданного входного сигнала, но выдает предупреждение, что входной сигнал занижен. lsim рекомендует шаг расчета, которая генерирует по меньшей мере 64 выборки за период входа u. Чтобы понять, почему эта рекомендация имеет значение, моделируйте sys снова с использованием шага расчета, меньшего рекомендуемого максимума.
figure
Ts2 = 0.01;
[u2,t2] = gensig("square",tau,Tf,Ts2);
lsim(sys,u2,t2)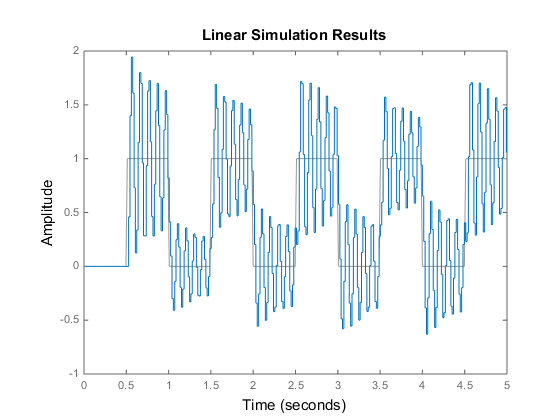
Этот ответ показывает сильное колебательное поведение, которое скрыто в недостаточно дискретизированной версии.
Когда вам нужны дополнительные опции индивидуальной настройки графика, используйте lsimplot вместо этого.
Для передаточной функции в дискретном времени,
lsim фильтрует вход на основе рекурсии, связанной с этой передаточной функцией:
Для дискретных zpk модели, lsim фильтрует вход через последовательность первого порядка или секций второго порядка. Этот подход избегает формирования полиномов числителя и знаменателя, что может вызвать числовую нестабильность для моделей более высокого порядка.
Для моделей пространства состояний в дискретном времени, lsim распространяет уравнения пространства состояний в дискретном времени,
Для систем непрерывного времени, lsim сначала дискретизирует систему, используя c2d, а затем распространяет получившиеся уравнения пространства состояний в дискретном времени. Если вы не задаете обратное с method входной параметр, lsim использует метод дискретизации с задержкой первого порядка, когда входной сигнал является плавным, и удержание с нулевым порядком, когда входной сигнал является прерывистым, например, для импульсов или квадратных волн. Дискретизация шага расчета быть интервалом dT между временными выборками, которые вы поставляете в t.
