Когда вы настраиваете систему управления, используя systune или Control System Tuner необходимо проверить результаты настройки. Результаты настройки обеспечивают числовые и графические указания того, насколько хорошо выполняются ваши цели настройки. (См. «Интерпретирование результатов числовой настройки и визуализация целей настройки».) Часто вы хотите изучить другие отклики системы, используя настроенные параметры контроллера. Если вы настраиваете Simulink® модель, вы также должны проверить настроенный контроллер на соответствие полной нелинейной системе. В командной строке и в Control System Tuner существует несколько инструментов, которые помогут вам проверить настроенную систему управления.
В дополнение к откликам системы, соответствующим целям настройки (см. «Визуализация целей настройки»), можно оценить производительность настроенной системы путем построения графиков других откликов системы. Для образца оцените отслеживание уставки или эффективности перерегулирования путем построения графика переходной характеристики передаточной функции от входного сигнала ссылки до управляемого выхода. Или оцените запасы устойчивости путем исследования передаточной функции без разомкнутого контура. Можно извлечь любую передаточную функцию, необходимую для анализа, из настроенной модели системы управления.
Инструменты настройки включают функции анализа, которые позволяют извлекать ответы из настроенной системы управления.
Для обобщенного пространства состояний (genss) модели, использование:
Для slTuner интерфейс, использование:
getIOTransfer
(for slTuner) (Simulink Control Design)
getLoopTransfer
(for slTuner) (Simulink Control Design)
getSensitivity
(for slTuner) (Simulink Control Design)
getCompSensitivity
(for slTuner) (Simulink Control Design)
В любом случае извлеченные отклики представлены пространством состояний (ss) модели. Можно анализировать эти модели с помощью таких команд, как step, bode, sigma, или margin.
Например, предположим, что вы настраиваете систему управления примера Multiloop Control of a Helicopter. Вы создали slTuner интерфейс ST0 для модели Simulink. Вы также указали цели настройки TrackReq, MarginReq1, MarginReq2, и PoleReq. Вы настраиваете систему управления, используя systune.
AllReqs = [TrackReq,MarginReq1,MarginReq2,PoleReq]; ST1 = systune(ST0,AllReqs);
Final: Soft = 1.12, Hard = -Inf, Iterations = 75
Предположим также, что ST0 имеет точки анализа, которые включают сигналы с именем theta-ref, theta, phi-ref, и phi. Использовать getIOTransfer для извлечения настроенных передаточных функций из theta-ref и phi-ref на theta и phi.
T1 = getIOTransfer(ST1,{'theta-ref','phi-ref'},{'theta','phi'});
step(T1,5)

График шага показывает, что извлеченная передаточная функция является 2-входным, 2-выходным ответом от заданных опорных входов к заданным выходам.
Для примера, который показывает, как извлечь ответы из настроенного genss , см. Извлечение ответов из настроенной модели MATLAB в командной строке.
Дополнительные примеры см. в разделе Проверка результатов.
Для получения информации о извлечении и графическом изображении откликов системы в Control System Tuner, смотрите, Создают Графики Отклика в Control System Tuner.
Когда вы настраиваете модель Simulink, программное обеспечение оценивает цели настройки для линеаризации модели. Точно так же команды анализа, такие как getIOTransfer извлечение линеаризованных систем. Поэтому необходимо подтвердить настроенные параметры контроллера путем симуляции полной нелинейной модели с настроенными параметрами контроллера, даже если настроенная линейная система соответствует всем вашим проектом требованиям. Для этого запишите настроенные значения параметров в модель.
Совет
Если вы настраиваете модель Simulink в рабочей точке, отличной от начального условия модели, инициализируйте модель в той же рабочей точке перед валидацией настроенных параметров контроллера. См. «Моделирование модели Simulink в конкретной рабочей точке» (Simulink Control Design).
Чтобы записать значения настроенных блоков из настроенных slTuner интерфейс к соответствующей модели Simulink, используйте writeBlockValue (Simulink Control Design) команда. Например, предположим ST1 является настроенным slTuner интерфейс, возвращенный systune. Следующая команда записывает настроенные параметры из ST1 к связанной модели Simulink.
writeBlockValue(ST1)
Симулируйте модель Simulink, чтобы оценить производительность системы с помощью настроенных значений параметров.
Чтобы записать настроенные параметры блоков в модель Simulink, на вкладке Control System, нажмите![]() Update Blocks.
Update Blocks.
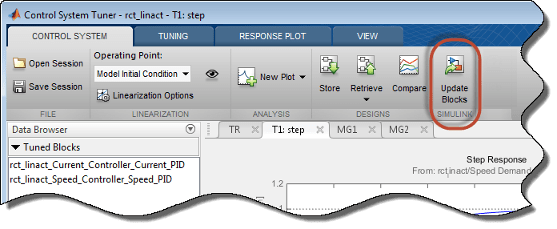
Control System Tuner передает текущие значения параметров настроенных блоков соответствующим блокам в модели Simulink. Симулируйте модель, чтобы оценить производительность системы с помощью настроенных значений параметров.
Чтобы обновить модель Simulink со значениями параметров из предыдущего проекта, сохраненными в Control System Tuner,![]() нажмите Retrieve и выберите сохраненный проект, который вы хотите сделать текущим дизайном. Затем нажмите
нажмите Retrieve и выберите сохраненный проект, который вы хотите сделать текущим дизайном. Затем нажмите![]() Update Blocks
.
Update Blocks
.
