Передаточная функция для заданного набора ввода-вывода с использованием slLinearizer или slTuner интерфейс
linsys = getIOTransfer(s,in,out)slLinearizer или slTuner интерфейс, s.
Программное обеспечение обеспечивает выполнение всех постоянных открытий, заданных для s когда вычисляет linsys. Для получения информации о том, как getIOTransfer лечит in и out, см. Передаточные функции. Если вы настроили s.Parameters, или s.OperatingPoints, или и то, и другое, getIOTransfer выполняет несколько линеаризаций и возвращает массив передаточных функций.
linsys = getIOTransfer(s,ios)ios для модели, связанной с s. Используйте linio команда для создания ios. Программное обеспечение применяет тип ввода-вывода линеаризации для каждого сигнала, заданного в ios когда вычисляет linsys. Программное обеспечение также обеспечивает выполнение всех постоянных открытий цикла, заданных для s.
linsys = getIOTransfer(___,mdl_index)mdl_index задает индекс интересующих линеаризаций в дополнение к любому из входных параметров в предыдущих синтаксисах.
Этот синтаксис используется для эффективной линеаризации, когда требуется получить передаточную функцию только для подмножества результатов пакетной линеаризации.
Получите передаточную функцию с обратной связью от опорного сигнала, r, на выход объекта, y, для ex_scd_simple_fdbk модель.
Откройте ex_scd_simple_fdbk модель.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
![]()
В этой модели:

Создайте slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Чтобы получить передаточную функцию с обратной связью от опорного сигнала, r, на выход объекта, y, добавьте обе точки к sllin.
addPoint(sllin,{'r','y'});
Получите передаточную функцию с обратной связью от r на y.
sys = getIOTransfer(sllin,'r','y'); tf(sys)
ans =
From input "r" to output "y":
3
-----
s + 8
Continuous-time transfer function.
Программа добавляет вход линеаризации в r, dr, и выходной параметр линеаризации в y.
![]()
sys - передаточная функция от dr на y, что равно.
Получите передаточную функцию модели объекта управления, G, для ex_scd_simple_fdbk модель.
Откройте ex_scd_simple_fdbk модель.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);

В этой модели:

Создайте slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Чтобы получить передаточную функцию модели объекта управления, используйте u как вход точка и y в качестве выходной точки. Чтобы исключить эффекты обратной связи, необходимо прервать цикл. Можно разбить цикл на u, e, или y. В данном примере разорвать цикл на u. Добавьте эти точки к sllin.
addPoint(sllin,{'u','y'});
Получите передаточную функцию модели объекта управления.
sys = getIOTransfer(sllin,'u','y','u'); tf(sys)
ans =
From input "u" to output "y":
1
-----
s + 5
Continuous-time transfer function.
Второй входной параметр задает u в качестве входов, в то время как четвертый входной аргумент задает u как временное открытие цикла.

sys - передаточная функция от du на y, что равно.
Предположим, вы пакетно линеаризируете scdcascade модель для нескольких передаточных функций. Для большинства линеаризаций вы варьируете пропорциональный (Kp2) и интегральная составляющая (Ki2) C2 контроллер в области значений 10%. В данном примере вычислите передаточную функцию разомкнутого контура для внутреннего цикла из e2 на y2, для максимального значения Kp2 и Ki2.
Откройте scdcascade модель.
mdl = 'scdcascade';
open_system(mdl);
![]()
Создайте slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Варьируйте пропорциональный (Kp2) и интегральная составляющая (Ki2) C2 контроллер в области значений 10%.
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid] = ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
Чтобы вычислить передаточную функцию без разомкнутого контура для внутреннего цикла, используйте e2 и y2 как точки анализа. Чтобы исключить эффекты внешнего контура, разорвите цикл на e2. Добавить e2 и y2 на sllin как точки анализа.
addPoint(sllin,{'e2','y2'})
Определите индекс для максимальных значений Ki2 и Kp2.
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
Получите передаточную функцию без разомкнутого контура от e2 на y2.
sys = getIOTransfer(sllin,'e2','y2','e2',mdl_index);
Откройте модель Simulink.
mdl = 'scdcascade';
open_system(mdl)
![]()
Создайте набор опций линеаризации и установите StoreOffsets опция.
opt = linearizeOptions('StoreOffsets',true);
Создание slLinearizer интерфейс.
sllin = slLinearizer(mdl,opt);
Добавьте точки анализа, чтобы вычислить передаточную функцию с обратной связью.
addPoint(sllin,{'r','y1m'});
Вычислите входную/выходную передаточную функцию и получите соответствующие смещения линеаризации.
[sys,info] = getIOTransfer(sllin,'r','y1m');
Просмотр смещений.
info.Offsets
ans =
struct with fields:
x: [6x1 double]
dx: [6x1 double]
u: 1
y: 0
StateName: {6x1 cell}
InputName: {'r'}
OutputName: {'y1m'}
Ts: 0
A transfer function является откликом системы LTI в выходной точке линеаризации на вход линеаризации. Вы выполняете линейный анализ передаточных функций, чтобы понять стабильность, характеристики временной области или характеристики частотного диапазона системы.
Можно вычислить несколько передаточных функций для заданного блока. Рассмотрим ex_scd_simple_fdbk модель:
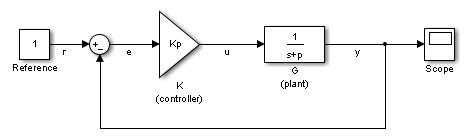
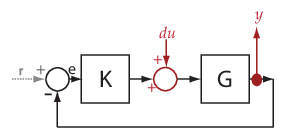
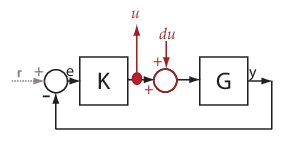
Можно вычислить передаточную функцию из входного сигнала ссылки в сигнал выхода объекта. The reference input (также упоминается как setpoint), r, берёт начало в блоке Reference, и plant output, y, берёт начало в блоке G. Эта передаточная функция также называется передаточной функцией overall closed-loop. Чтобы вычислить эту передаточную функцию, программное обеспечение добавляет вход линеаризации в r, dr, и выходной параметр линеаризации в y.
![]()
Программа вычисляет общую передаточную функцию замкнутой системы как передаточную функцию от dr на y, что равно (I + G K)-1<reservedrangesplaceholder1> <reservedrangesplaceholder0>.
Заметьте, что передаточная функция от r на y равен передаточной функции от dr на y.
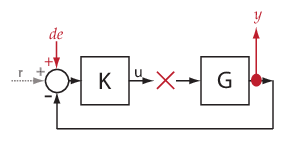
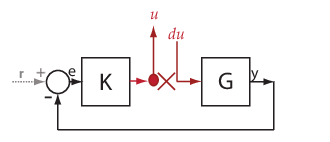
Можно вычислить plant transfer function из исходных данных объекта входа, u, на выход объекта, y. Чтобы изолировать динамику объекта от эффектов цикла обратной связи, введите пропуск цикла (или opening) при y, e, или, как показано, в u.
Программа разрывает цикл и добавляет вход линеаризации, du, в u, и выходной параметр линеаризации в y. Передаточная функция объекта равна передаточной функции от du на y, что G.
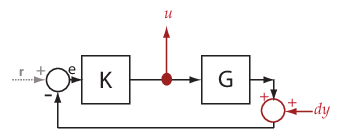
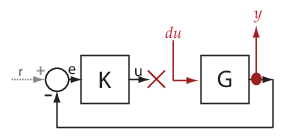
Точно так же, чтобы получить controller transfer function, вычислите передаточную функцию от входа контроллера, e, на контроллер выход, u. Разорвать цикл обратной связи на y, e, или u.
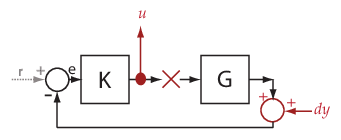
Вы можете использовать getIOTransfer для получения различных передаточных функций без разомкнутого контура и с обратной связью. Чтобы сконфигурировать передаточную функцию, задайте точки анализа как входы, выходы и открытия (временные или постоянные) в любой комбинации. Программа обрабатывает каждую комбинацию уникально. Рассмотрим следующий код, который показывает несколько различных способов, которые вы можете использовать точку анализа, uдля получения передаточной функции:
sllin = slLinearizer('ex_scd_simple_fdbk') addPoint(sllin,{'u','e','y'}) T0 = getIOTransfer(sllin,'e','y','u'); T1 = getIOTransfer(sllin,'u','y'); T2 = getIOTransfer(sllin,'u','y','u'); T3 = getIOTransfer(sllin,'y','u'); T4 = getIOTransfer(sllin,'y','u','u'); T5 = getIOTransfer(sllin,'u','u'); T6 = getIOTransfer(sllin,'u','u','u');
В T0, u задает пропуск цикла. В T1, u задает только вход, тогда как в T2, u задает вход и проем, также называемые open-loop input. В T3, u задает только выход, тогда как в T4, u задает выход и открытие, также называемые open-loop output. В T5, u задает вход и выход, также называемые complementary sensitivity point. В T6, u задает вход, выход и открытие, также называемые loop transfer point. Таблица описывает, как getIOTransfer рассматривает точки анализа с акцентом на различные виды использования u.
| u Задает... | Как getIOTransfer Обрабатывает точки анализа | Передаточная функция |
|---|---|---|
|
Цикл пропуска Пример кода: T0 = getIOTransfer(sllin,'e','y','u') |
Программное обеспечение останавливает поток сигналов на |
|
|
Вход Пример кода: T1 = getIOTransfer(sllin,'u','y') |
Программное обеспечение добавляет вход линеаризации, |
|
|
Разомкнутый контур Пример кода: T2 = getIOTransfer(sllin,'u','y','u') |
Программа ломает поток сигналов и добавляет вход линеаризации, |
|
|
Выход Пример кода: T3 = getIOTransfer(sllin,'y','u') |
Программное обеспечение добавляет вход линеаризации, |
|
|
Выходные данные разомкнутого контура Пример кода: T4 = getIOTransfer(sllin,'y','u','u') |
Программное обеспечение добавляет вход линеаризации, |
|
|
Дополнительная точка чувствительности Пример кода: T5 = getIOTransfer(sllin,'u','u') Совет Вы также можете получить дополнительную функцию чувствительности, используя |
Программное обеспечение добавляет выход линеаризации и вход линеаризации, |
|
|
Точка передаточной функции цикла Пример кода: T6 = getIOTransfer(sllin,'u','u','u') Совет Можно также получить функцию переноса цикла с помощью |
Программа добавляет выход линеаризации, разрывает цикл и добавляет вход линеаризации, |
|
Программа не изменяет модель Simulink, когда вычисляет передаточную функцию.
addOpening | addPoint | getCompSensitivity | getLoopTransfer | getSensitivity | slLinearizer | slTuner