Считайте сценарий вождения в модель
Автоматизированный драйвер Toolbox/Сценарий вождения и моделирование датчика
Блок Scenario Reader считывает дороги и актёров из файла сценария, созданного с помощью приложения Driving Scenario Designer или из drivingScenario объект. Блок выводит положения актёров или в системе координат автомобиль , оборудованный датчиком, или в мировых координатах сценария. Можно также вывести контуры маршрута или вывести положение автомобиль , оборудованный датчиком для использования в 3D среде симуляции.
Чтобы сгенерировать обнаружения контуров объекта и маршрута из выходных положений актёра и контуров маршрута, передайте выходы положения и границы блокам датчика. Используйте синтетические обнаружения, сгенерированные этими датчиками, чтобы проверить эффективность алгоритмов слияния датчиков, алгоритмов отслеживания и других алгоритмов автоматизированной системы помощи в вождении (ADAS). Чтобы визуализировать эффективность этих алгоритмов, используйте Bird's-Eye Scope.
Можно считать автомобиль , оборудованный датчиком из сценария или задать автомобиль , оборудованный датчиком, заданное в модели, как вход в блок Scenario Reader. Используйте эту опцию, чтобы протестировать алгоритмы регулятора транспортного средства с обратной связью, такие как автономное экстренное торможение (AEB), помощь в поддержании маршрута (LKA) или адаптивный круиз-контроль (ACC).
Блок Scenario Reader не читает данные датчика из файлов сценария, сохраненных из приложения Driving Scenario Designer. Чтобы воспроизвести датчики в Simulink®, в приложении, откройте файл сценария, который содержит датчики. Затем на панели инструментов приложения выберите Export > Export Sensor Simulink Model. Скопируйте сгенерированные блоки датчиков в существующую модель. Также выберите Export > Export Simulink Model и запустите новую модель из сгенерированных блоков Scenario Reader и sensor.
Крупные дорожные сети, включая OpenDRIVE® дорожные сети, могут занять до нескольких минут, чтобы прочитать в модели.
Source of driving scenario - Источник сценария вожденияFrom file (по умолчанию) | From workspaceИсточник сценария вождения, заданный как один из следующих опций:
From file - В параметре Driving Scenario Designer file name укажите имя файла сценария, который был сохранен из приложения Driving Scenario Designer.
From workspace - В параметре MATLAB or model workspace variable name задайте имя переменной рабочей области MATLAB или модели, которая содержит drivingScenario объект.
Driving Scenario Designer file name - Имя файла сценарияEgoVehicleGoesStraight.mat (по умолчанию) | файл сценария в пути поиска файлов MATLAB | путь к файлу сценарияИмя файла сценария, заданное как файл сценария в пути поиска файлов MATLAB или как полный путь к файлу сценария. Файл сценария должен быть MAT-файлом, сохраненным из Driving Scenario Designer приложения. Если для параметра Source of ego vehicle задано значение Scenario, тогда сценарий должен содержать автомобиль , оборудованный датчиком. В противном случае блок возвращает ошибку во время симуляции.
Если заданный файл сценария содержит датчики, блок игнорирует их. Чтобы включить датчики из сценария в вашу модель, смотрите Советы.
Файл сценария по умолчанию показывает автомобиль , оборудованный датчиком, перемещающийся на север по прямой двухполосной дороге с другим транспортным средством, движущимся на юг по противоположной полосе.
Чтобы добавить файл сценария к пути поиска файлов MATLAB, используйте addpath функция. Например, этот код добавляет набор папок, содержащий предварительно построенный Euro NCAP® сценарии в путь поиска файлов MATLAB.
path = fullfile(matlabroot,'toolbox','driving','drivingdata', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path))
В параметре Driving Scenario Designer file name можно затем задать имя любого сценария, расположенного в этих папках, не задавая полный путь к файлу. Для примера: AEB_PedestrianChild_Nearside_50width.mat.
Когда вы сделаны с использованием сценария в моделях, можно удалить любые добавленные папки из пути поиска файлов MATLAB с помощью rmpath функция.
rmpath(genpath(path))
Чтобы включить этот параметр, установите параметр Source of driving scenario равным From file.
MATLAB or model workspace variable name - Имя переменной сценарияscenario (по умолчанию) | drivingScenario имя переменной объектаИмя переменной сценария, заданное как имя Рабочего пространства MATLAB или рабочего пространства модели переменной, содержащей допустимое drivingScenario объект. Если переменная сценария с таким же именем появляется как в рабочем пространстве MATLAB, так и в рабочей области модели, блок использует переменную, заданную в рабочем пространстве модели.
Если для параметра Source of ego vehicle задано значение Scenario, затем drivingScenario объект должен содержать автомобиль , оборудованный датчиком. Чтобы обозначить, какой актёр в объекте является автомобиль , оборудованный датчиком, в параметре Ego vehicle ActorID задайте ActorID значение свойства этого актёра.
Имя переменной по умолчанию, scenario, - имя по умолчанию drivingScenario объекты, созданные функциями MATLAB, которые экспортируются из приложения Driving Scenario Designer. По умолчанию эта переменная не включается в Рабочее пространство MATLAB или рабочее пространство модели.
Чтобы включить этот параметр, установите параметр Source of driving scenario равным From workspace.
Coordinate system of actors output - Система координат выводимых актёровVehicle coordinates (по умолчанию) | World coordinatesСистема координат выходных актёров, заданная как одно из следующих значений:
Vehicle coordinates - Координаты заданы относительно автомобиля , оборудованного датчиком. Выберите это значение, когда в вашем сценарии есть только один автомобиль , оборудованный датчиком.
World coordinates - Координаты заданы относительно сценария вождения. Выберите это значение в сценариях с мультиагентами, которые содержат более одного автомобили , оборудованные датчиком. Если вы выбираете это значение, визуализация модели с помощью Bird's-Eye Scope не поддерживается.
Для получения дополнительной информации о транспортном средстве и мировых системах координат смотрите Системы координат в Automated Driving Toolbox.
Source of ego vehicle - Источник автомобиля , оборудованного датчикомScenario (по умолчанию) | Input portИсточник автомобиля , оборудованного датчиком, указанный в качестве одного из следующих опций:
Scenario - Используйте ego vehicle, заданный в сценарии, который задается параметром Driving Scenario Designer file name или MATLAB or model workspace variable name. Положение автомобиля , оборудованного датчиком исключено из порта Actors выхода. Позиции актёра находятся в транспортном средстве координатах, что означает, что они относятся к мировому координатному положению автомобиля , оборудованного датчиком в сценарии.
Выберите эту опцию, чтобы протестировать разомкнутый контур алгоритмы ADAS, где поведение автомобиля , оборудованного датчиком предопределено и не меняется по мере развития сценария. Для получения примера смотрите Тестирование Разомкнутого контура Алгоритм ADAS с использованием сценария вождения.
Input port - Укажите ego vehicle при помощи Ego Vehicle входного порта. Положение автомобиля , оборудованного датчиком не включено в порт Actors выхода.
При помощи этой опции автомобиль , оборудованный датчиком в вашей модели должна включать стартовое положение, которое находится в мировых координатах. Все другие положения актёра находятся в координатах автомобиля и расположены относительно автомобиля , оборудованного датчиком. Пример автомобиля , оборудованного датчиком с определенной информацией о положении см. в разделе Помощь в сохранении маршрута с обнаружением маршрута. При определении стартового положения автомобиль , оборудованный датчиком, рассмотрите использование положения, которое уже определено в сценарии. При помощи этой позиции, если вы задаете Source of ego vehicle Scenario а затем вернемся к Input port, вы не должны вручную менять начальное положение.
Выберите эту опцию, чтобы протестировать алгоритмы ADAS с обратной связью, где автомобиль , оборудованный датчиком реагирует на изменения по мере развития сценария. Для получения примера см. «Тестирование алгоритма ADAS с обратной связью с использованием сценария вождения».
Чтобы включить этот параметр, установите параметр Coordinate system of actors output равным Vehicle coordinates.
Ego vehicle ActorID - Идентификатор актёра эго-автомобиля1 (по умолчанию) | положительное целое числоИдентификатор актёра автомобиля , оборудованного датчиком, заданный как положительное целое число. Используйте этот параметр для симуляции с использованием автомобиля , оборудованного датчиком, которая читается из drivingScenario объект.
Когда Source of ego vehicle установлено на Scenario, установите этот параметр в ActorID значение, которое сохранено в Actors свойство заданного drivingScenario объект. Проверка допустимых ActorID значения, используйте этот синтаксис, где scenario - имя drivingScenario имя переменной.
actorIDs = [scenario.Actors.ActorID]
Когда Source of ego vehicle установлено на Input Port, необходимо задать этот параметр в ActorID значение в Ego Vehicle входном порте блока.
Чтобы включить этот параметр, установите эти параметры в таком порядке:
Установите параметр Source of driving scenario равным From workspace.
Установите параметр Coordinate system of actors output равным Vehicle coordinates.
Output ego vehicle pose - Выходное положение эго-транспортного средстваoff (по умолчанию) | onВыберите этот параметр, чтобы вывести положение автомобиля , оборудованного датчиком в порте Ego Vehicle.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output равным Vehicle coordinates и параметр Source of ego vehicle для Scenario.
Ego vehicle follows ground - Ориентируйте эго-транспортное средство для следования за дорожным покрытиемoff (по умолчанию) | onВыберите этот параметр, чтобы сориентировать автомобиль , оборудованный датчиком, чтобы следовать повышению поверхности дороги. Блок обновляет повышение, крен, тангаж и рыскание автомобиля , оборудованного датчиком и выходов актёров и контуров маршрута относительно обновленных координат автомобиля , оборудованного датчиком. Блок не обновляет скорость или скорость вращения автомобиля , оборудованного датчиком.
Используйте этот параметр в симуляциях с обратной связью, где повышение дорожной сети изменяется.
Примечание
В соединениях дорог, которые имеют различные повышения и банковские углы, обновленные значения автомобиль , оборудованный датчиком могут быть неточными.
В симуляциях без разомкнутого контура, где Source of ego vehicle установлено на Scenario, автомобиль , оборудованный датчиком следует повышению, указанной в сценарии вождения.
Чтобы включить этот параметр, установите Coordinate system of actors output равным Vehicle coordinates и Source of ego vehicle к Input port.
Sample time (s) - Шаг расчета симуляции0.1 (по умолчанию) | положительный действительный скалярШаг расчета симуляции, в секундах, задается как положительный действительный скаляр. Унаследованные и непрерывные шаги расчета не поддерживаются. Этот пример времени отделен от шагов расчета, которые Driving Scenario Designer приложение и drivingScenario использование объекта во время симуляции.
Lane boundaries to output - контуры маршрута для выводаNone (по умолчанию) | Ego vehicle lane boundaries | All lane boundariesКонтуры маршрута для вывода, заданные как один из следующих опций:
None - Не выводить границы маршрута.
Ego vehicle lane boundaries - Вывод границ левого и правого маршрута эго-автомобиля.
All lane boundaries - Вывод всех контуров маршрута дороги, по которой движется эго-машина.
Если вы выбираете Ego vehicle lane boundaries или All lane boundaries, затем блок возвращает контуры маршрута в Lane Boundaries выходном порту.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output равным Vehicle coordinates.
Distances from ego vehicle for computing boundaries (m) - Расстояния от ego vehicle, на которых можно вычислить контуры маршрутаlinspace(-150,150,101) (по умолчанию) | N вектор с реальным значением -элементРасстояния от ego vehicle, на которых можно вычислить контуры маршрута, заданные как N-element вектор с реальным значением. N - количество значений расстояния. При обнаружении полос движения от обращенных назад камер задайте отрицательные расстояния. При обнаружении полос с фронтальных камер задайте положительные расстояния. Модули измерения указаны в метрах.
По умолчанию блок вычисляет 101 контур маршрута в области значений от 150 метров позади автомобиль , оборудованный датчиком до 150 метров впереди автомобиль , оборудованный датчиком. Эти расстояния линейно разнесены на 3 метра.
Пример: 1:0.1:10 вычисляет контур маршрута через каждые 0,1 метра над областью значений от 1 до 10 метров перед автомобилем , оборудованным датчиком.
Чтобы включить этот параметр, установите параметр Lane boundaries to output равным Ego vehicle lane boundaries или All lane boundaries.
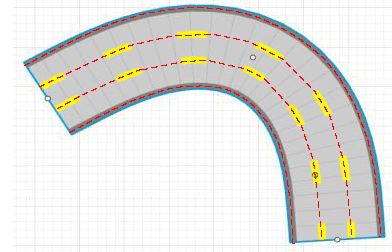
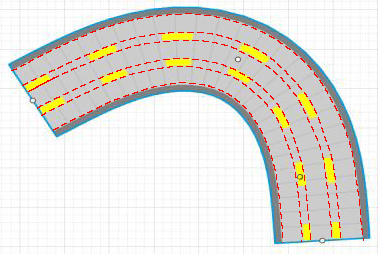
Location of boundaries on lane markings - Расположение контуров маршрутаCenter of lane markings (по умолчанию) | Inner edge of lane markingsРасположение контура маршрута на разметке маршрута, заданное как один из опций в этой таблице.
| Расположение контура маршрута | Описание | Пример |
|---|---|---|
Center of lane markings | Контуры маршрута центрируются по разметке маршрута. | Трехполосная дорога имеет четыре контуров маршрута: по одной на разметку маршрута.
|
Inner edge of lane markings | Контуры маршрута размещаются на внутренних краях разметки маршрута. | Трехполосная дорога имеет шесть контуров маршрута: по два на полосу.
|
Чтобы включить этот параметр, установите параметр Lane boundaries to output равным Ego vehicle lane boundaries или All lane boundaries.
Source of actors bus name - Источник имени для автобуса актёраAuto (по умолчанию) | PropertyИсточник имени актёра помещает шину, возвращенную в Actors выходном порту, заданный как один из следующих опций:
Auto - Блок автоматически создает имя шины актёра.
Property - Задайте имя шины актёра при помощи параметра Actors bus name.
Actors bus name - Имя актёра позирует автобусИмя актёра положений шины, возвращенной в Actors выхода порте, заданное как допустимое имя шины.
Чтобы включить этот параметр, установите Source of actors bus name равным Property.
Source of maximum number of actors - Источник максимального числа действующих лицScenario (по умолчанию) | PropertyИсточник максимального количества актёров, которые можно иметь в сценарии вождения, заданный как один из следующих опций:
Scenario - Блок устанавливает максимальное количество актёров на количество актёров в сценарии вождения. Это значение равно NumActors поле шины, возвращаемое выходным Actors портом. Когда вы изменяете сценарий входа, максимальное количество актёров обновляется, чтобы соответствовать новому NumActors значение.
Property - Задайте максимальное количество актёров при помощи параметра Maximum number of actors. Выберите эту опцию, когда необходимо повторно использовать ту же шину актёра между сценариями, которые имеют различное количество актёров, например, при выводе актёров из ссылочной модели.
Maximum number of actors - Максимальное число актёров100 (по умолчанию) | положительное целое числоМаксимальное количество актёров в сценарии, заданное в виде положительного целого числа.
Чтобы включить этот параметр, установите параметр Source of maximum number of actors равным Property.
Source of lane boundaries bus name - Источник наименования шины контуров маршрутаAuto (по умолчанию) | PropertyИсточник имени шины контуров маршрута, возвращенный в Lane Boundaries выходном порту, заданный как один из следующих опций:
Auto - Блок автоматически создает имя шины контуров маршрута.
Property - Задайте имя шины контуров маршрута с помощью параметра Lane boundaries bus name.
Чтобы включить этот параметр:
Установите параметр Coordinate system of actors output равным Vehicle coordinates.
Установите параметр Lane boundaries to output равным Ego vehicle lane boundaries или All lane boundaries.
Lane boundaries bus name - Имя контуров маршрутаИмя шины контуров маршрута, возвращенное в Lane Boundaries выходном порту, задается как допустимое имя шины.
Чтобы включить этот параметр:
Установите параметр Coordinate system of actors output равным Vehicle coordinates.
Установите параметр Lane boundaries to output равным Ego vehicle lane boundaries или All lane boundaries.
Установите параметр Source of lane boundaries bus name равным Property.
Source of maximum number of lane boundaries - Источник максимального количества контуров маршрутаScenario (по умолчанию) | PropertyИсточник максимального количества контуров маршрута, которые можно иметь в сценарии вождения, заданный как один из следующих опций:
Scenario - Блок устанавливает максимальное количество контуров маршрута на количество контуров маршрута в сценарии вождения. Это значение равно NumLaneBoundaries поле шины, возвращаемое выходным Lane Boundaries портом. Когда вы изменяете сценарий входа, максимальное количество контуров маршрута обновляется, чтобы соответствовать новому NumLaneBoundaries значение.
Property - Задайте максимальное количество контуров маршрута при помощи параметра Maximum number of lane boundaries. Выберите эту опцию, когда необходимо повторно использовать те же маршрутные контуры шину между сценариями, которые имеют меняющееся количество контуров маршрута, например, при выводе контуров маршрута из ссылочной модели.
Чтобы включить этот параметр:
Установите параметр Coordinate system of actors output равным Vehicle coordinates.
Установите параметр Lane boundaries to output равным All lane boundaries.
Maximum number of lane boundaries - Максимальное количество контуров маршрута10 (по умолчанию) | положительное целое числоМаксимальное количество контуров маршрута, которые можно иметь в сценарии, заданное в виде положительного целого числа.
Чтобы включить этот параметр:
Установите параметр Coordinate system of actors output равным Vehicle coordinates.
Установите параметр Lane boundaries to output равным All lane boundaries.
Установите параметр Source of maximum number of lane boundaries равным Property.
Source of ego vehicle bus name - Источник имени для шины положения эго-автомобиляAuto (по умолчанию) | PropertyИсточник имени шины положения автомобиля , оборудованного датчиком, возвращенный в Ego Vehicle выхода порте, заданный как один из следующих опций:
Auto - Блок автоматически создает имя шины положения ego vehicle.
Property - Укажите имя шины положения ego vehicle при помощи параметра Ego vehicle bus name.
Чтобы включить этот параметр, выберите параметр Output ego vehicle pose.
Ego vehicle bus name - Имя шины положения эго-транспортного средстваИмя шины положения автомобиля , оборудованного датчиком, возвращенное в Ego Vehicle выходном порте, задается как допустимое имя шины.
Чтобы включить этот параметр, выберите параметр Output ego vehicle pose и установите параметр Source of ego vehicle bus name равным Property.
Show coordinate labels - Отобразите систему координат входов и выходовon (по умолчанию) | offВыберите этот параметр, чтобы отобразить систему координат входов и выходов блоков на блоке Scenario Reader в блок-схеме.
Ego Vehicle входа и выхода всегда в мировых координатах.
Выход Lane Boundaries всегда в координатах транспортного средства.
Можно вернуть выход Actors в координатах транспортного средства или мира, в зависимости от выбора Coordinate system of actors output параметра.
Для наилучших результатов используйте только один активный Scenario Reader блок на модель. Чтобы использовать несколько блоков Scenario Reader в одной модели, переключитесь между блоками, задав их в вариант подсистемы.
Чтобы протестировать свой алгоритм на изменениях сценария вождения, можно обновить сценарий между симуляциями.
Если источником сценария является файл сценария, откройте файл сценария в приложении Driving Scenario Designer, обновите параметры и сбросьте файл.
Если источником сценария является drivingScenario объект обновляется в MATLAB или рабочее пространство модели. Кроме того, импортируйте объект в приложение, измените сценарий в приложении, а затем сгенерируйте новый объект из приложения. для получения дополнительной информации смотрите Создание изменений сценария программно.
Чтобы переключаться между сценариями с различными настройками параметра, можно использовать программное обеспечение Simulink Test™. Для получения примера смотрите Automate Проверки for Highway Lane Following.