Оцените модель пространства состояний с использованием данных временной области или частотного диапазона
sys = ssest(data,nx)sys порядка nx, использование данных data который может находиться в временном интервале или частотном диапазоне. sys является моделью следующей формы:
A, B, C, D, и K являются матрицами пространства состояний. u (t) - вход, y (t) - выход, e (t) - нарушение порядка, а x (t) - вектор nx состояния.
Все записи A, B, C и K по умолчанию являются свободно оцениваемыми параметрами. D по умолчанию фиксируется на нуле, что означает отсутствие сквозного соединения, кроме статических систем (nx = 0).
sys = ssest(data,nx,Name,Value)'Ts' аргумент пары "имя-значение". Используйте 'Form', 'Feedthrough', и 'DisturbanceModel' Аргументы пары "имя-значение" для изменения поведения по умолчанию матриц A, B, C, D и K.
Оцените модель пространства состояний и сравните ее ответ с измеренным выходом.
Загрузите входно-выходные данные, которые хранятся в iddata объект.
load iddata1 z1
Оцените модель пространства состояний четвертого порядка.
nx = 4; sys = ssest(z1,nx);
Сравните моделируемую характеристику модели с измеренным выходом.
compare(z1,sys)

График показывает, что процент соответствия между моделируемой моделью и данными оценки больше 70%.
Вы можете просмотреть больше информации об оценке, исследуя idss свойства sys.Report.
sys.Report
ans =
Status: 'Estimated using SSEST with prediction focus'
Method: 'SSEST'
InitialState: 'zero'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1x1 struct]
Parameters: [1x1 struct]
OptionsUsed: [1x1 idoptions.ssest]
RandState: []
DataUsed: [1x1 struct]
Termination: [1x1 struct]
Для примера узнайте больше об условиях расторжения.
sys.Report.Termination
ans = struct with fields:
WhyStop: 'No improvement along the search direction with line search.'
Iterations: 7
FirstOrderOptimality: 85.9759
FcnCount: 123
UpdateNorm: 14.2002
LastImprovement: 0
Отчет включает информацию о количестве итераций и причине остановки итерации оценки.
Загрузите входно-выходные данные z1, который хранится в iddata объект. Это те же данные, что и для оценки модели четвертого порядка в модели пространства состояний.
load iddata1 z1
Определите оптимальный порядок модели путем определения аргумента nx как область значений от 1:10.
nx = 1:10; sys = ssest(z1,nx);
Автоматически сгенерированный график показывает сингулярные значения Ханкеля для моделей порядков, заданных nx.
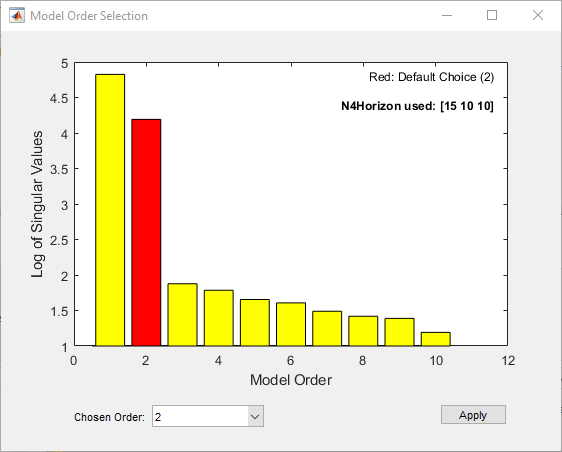
Состояния с относительно маленькими сингулярными значениями Ханкеля могут быть безопасно отброшены. Предлагаемый выбор порядка по умолчанию 2.
Выберите порядок модели в списке Chosen Order и нажмите Apply.
Загрузка данных отклика системы во временной области.
load iddata7 z7;
Идентифицируйте модель данных в пространстве состояний четвертого порядка. Задайте известную задержку 2 секунд для первого входа и 0 секунд для второго входа.
nx = 4;
sys = ssest(z7(1:300),nx,'InputDelay',[2;0]);Измените каноническую форму матриц A, B и C, включите исходный член в матрицу D и устраните оценку модели возмущения в матрице K.
Загрузите данные ввода-вывода и оцените систему четвертого порядка с помощью ssest опции по умолчанию.
load iddata1 z1 sys1 = ssest(z1,4);
Укажите сопутствующую форму и сравните A матрица с A по умолчанию матрица.
sys2 = ssest(z1,4,'Form','companion'); A1 = sys1.A
A1 = 4×4
-0.5155 -3.8483 0.6657 -0.2666
5.8665 -2.7285 1.0649 -1.4694
-0.4487 0.9308 -0.6235 18.8148
-0.4192 0.5595 -16.0688 0.5399
A2 = sys2.A
A2 = 4×4
103 ×
0 0 0 -7.1122
0.0010 0 0 -0.9547
0 0.0010 0 -0.3263
0 0 0.0010 -0.0033
Включите исходный термин и сравните D матрицы.
sys3 = ssest(z1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0339
Исключите моделирование нарушений порядка и сравните K матрицы.
sys4 = ssest(z1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0520
0.0973
0.0151
0.0270
K4 = sys4.K
K4 = 4×1
0
0
0
0
Задайте ssest оценить начальные состояния как параметры независимой оценки.
ssest может обрабатывать начальные состояния одним из нескольких методов. По умолчанию ssest автоматически выбирает метод на основе данных оценки. Вы можете самостоятельно выбрать метод, изменив набор опций с помощью ssestOptions.
Загрузите входно-выходные данные z1 и оцените модель пространства состояний второго порядка sys использование опций по умолчанию. Используйте синтаксис, который возвращает начальные состояния x0.
load iddata1 z1 [sys,x0] = ssest(z1,2); x0
x0 = 2×1
0
0
По умолчанию оценка выполняется с помощью 'auto' настройка для InitialState. Узнайте, какой метод ssest применяется путем рассмотрения значения InitialState в sys.Reporт.
sys.Report.InitialState
ans = 'zero'
Программное обеспечение применило 'zero' метод, означающий, что программное обеспечение устанавливает начальные состояния в нулевые, а не оценивает их. Этот выбор соответствует 0 значения, возвращенные для x0.
Задайте, что ssest оцените начальные состояния как независимые параметры, используя 'estimate' настройка. Использование ssestOptions чтобы создать измененный набор опций и задать этот набор опций для оценки новой модели.
opt = ssestOptions('InitialState','estimate'); [sys1,x0] = ssest(z1,2,opt); x0
x0 = 2×1
0.0068
0.0052
x0 теперь имеет оцененные параметры с ненулевыми значениями.
Получите регулярную модель пространства состояний пятого порядка для системы второго порядка из сигнала узкой полосы пропускания.
Данные оценки нагрузки.
load regularizationExampleData eData;
Создайте модель передаточной функции, используемую для генерации данных оценки (истинная система).
trueSys = idtf([0.02008 0.04017 0.02008],[1 -1.561 0.6414],1);
Оцените нерегулярную модель пространства состояний.
opt = ssestOptions('SearchMethod','lm'); m = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
Оцените регуляризованную модель пространства состояний.
opt.Regularization.Lambda = 10; mr = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
Сравните выходы модели с данными оценки.
compare(eData,m,mr);

Сравните импульсные характеристики модели.
impulse(trueSys,m,mr,50); legend('trueSys','m','mr');

Оцените модель пространства состояний измеренных входно-выходных данных. Сконфигурируйте ограничения параметров и начальные значения для оценки с помощью модели пространства состояний.
Создайте idss модель, чтобы задать начальную параметризацию для оценки.
A = blkdiag([-0.1 0.4; -0.4 -0.1],[-1 5; -5 -1]); B = [1; zeros(3,1)]; C = [1 1 1 1]; D = 0; K = zeros(4,1); x0 = [0.1 0.1 0.1 0.1]; Ts = 0; init_sys = idss(A,B,C,D,K,x0,Ts);
Установка всех записей K на 0 создает idss модель без элемента нарушения порядка состояния.
Используйте Structure свойство для фиксации значений некоторых параметров модели. Сконфигурируйте модель так, чтобы B и K являются фиксированными, и только ненулевые значения A могут быть оценены.
init_sys.Structure.A.Free = (A~=0); init_sys.Structure.B.Free = false; init_sys.Structure.K.Free = false;
Записи в init_sys.Structure.A.Free определить, соответствуют ли соответствующие записи в init_sys.A свободны (true) или фиксированный (false).
Загрузите измеренные данные и оцените модель пространства состояний с помощью ограничений параметра и начальных значений, заданных init_sys.
load iddata2 z2; sys = ssest(z2,init_sys);
Предполагаемые параметры sys удовлетворить ограничениям, заданным в init_sys.
ssest инициализирует оценки параметров с помощью или нетеративного подпространственного подхода, или итерационного подхода оценки рациональной функции. Затем он уточняет значения параметров, используя подход минимизации ошибок предсказания. Для получения дополнительной информации см. pem и ssestOptions.
[1] Ljung, L. System Identification: Теория для пользователя, Second Edition. Upper Saddle River, NJ: Prentice Hall PTR, 1999.
canon | iddata | idfrd | idgrey | idss | n4sid | pem | polyest | procest | ssestOptions | ssregest | tfest