Приложение Lidar Labeler позволяет вам пометить достоверные данные в облаках точек. Для импорта данных можно использовать пользовательский считыватель. Сначала создайте пользовательскую функцию reader. Затем загружает в Lidar Labeler пользовательскую функцию reader и соответствующий источник данных облака точек.
Укажите пользовательский считыватель в качестве указателя на функцию. Пользовательский модуль чтения должен иметь этот синтаксис.
outputPointCloud = readerFcn(sourceName,currentTimestamp)
readerFcn - имя пользовательской функции reader.Пользовательская функция reader загружает облако точек из sourceName, что соответствует текущей временной метке, заданной как currentTimestamp. Например, предположим, что вы хотите загрузить облако точек в третьей временной метке для временной метки duration вектор, который длится от 1 до 5 секунд. Чтобы задать currentTimestamp, в MATLAB® введите этот код в командной строке.
timestamps = seconds(1:5); currIdx = 3; currentTimestamp = timestamps(currIdx);
outputPointCloud из пользовательской функции reader должен быть pointCloud объект. currentTimestamp является скалярным значением, которое соответствует текущей системе координат, который выполняет функция.
Чтобы импортировать пользовательский источник данных в приложение, сначала создайте структуру. Эта структура хранит указатель на функцию и временные метки. Укажите пользовательский указатель на функцию чтения, который считывает данные и временные метки.
sourceParams = struct(); sourceParams.FunctionHandle = readerFcn; sourceParams.Timestamps = timestamps;
Чтобы загрузить эту структуру в приложение, в командной строке MATLAB введите этот код.
lidarLabeler(sourceName,@sourceParams.FunctionHandle,sourceParams.Timestamps);
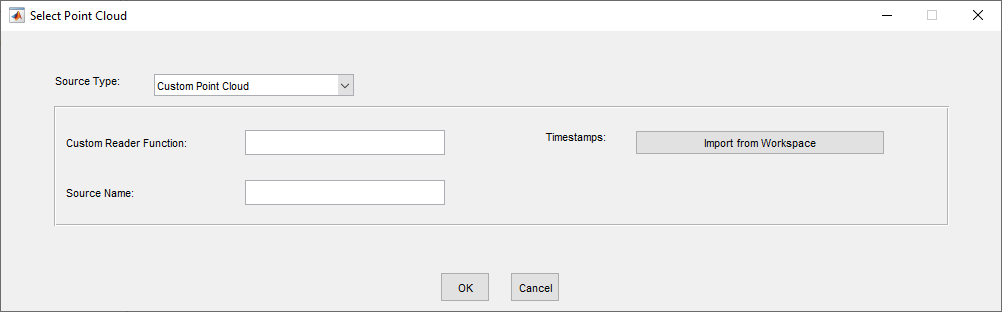
Кроме того, на панели инструментов приложения Lidar Labeler выберите Import > Add Point Cloud. Затем в диалоговом окне Select Point Cloud выберите Custom Point Cloud как Source Type. Задайте Custom Reader Function как указатель на функцию, а также задайте Source Name. В сложение необходимо импортировать соответствующие временные метки из Рабочего пространства MATLAB.