Вычислительный коэффициент снижения
Motor Control Blockset/Элементы управления/Контроллеры
Блок Derating Function генерирует коэффициент удаления (y) согласно обратной связи (ffeedback) и максимальный предел (fmax) значения входного опорного сигнала.
Коэффициент снижения:
Остается равным единице, когда ffeedback лежит между положительным и отрицательным значениями Derating threshold. Коэффициент удаления изменяется линейно вне этой области значений в соответствии с ffeedback.
Остается равным нулю, когда опорный сигнал лежит за пределами (положительный или отрицательный) fmax.
Поэтому можно использовать сгенерированный коэффициент удаления для удаления управляющего сигнала после пересечения опорного сигнала заданного Derating threshold.
Этот рисунок показывает выход блока, когда вы используете синусоидальную волну как ffeedback.
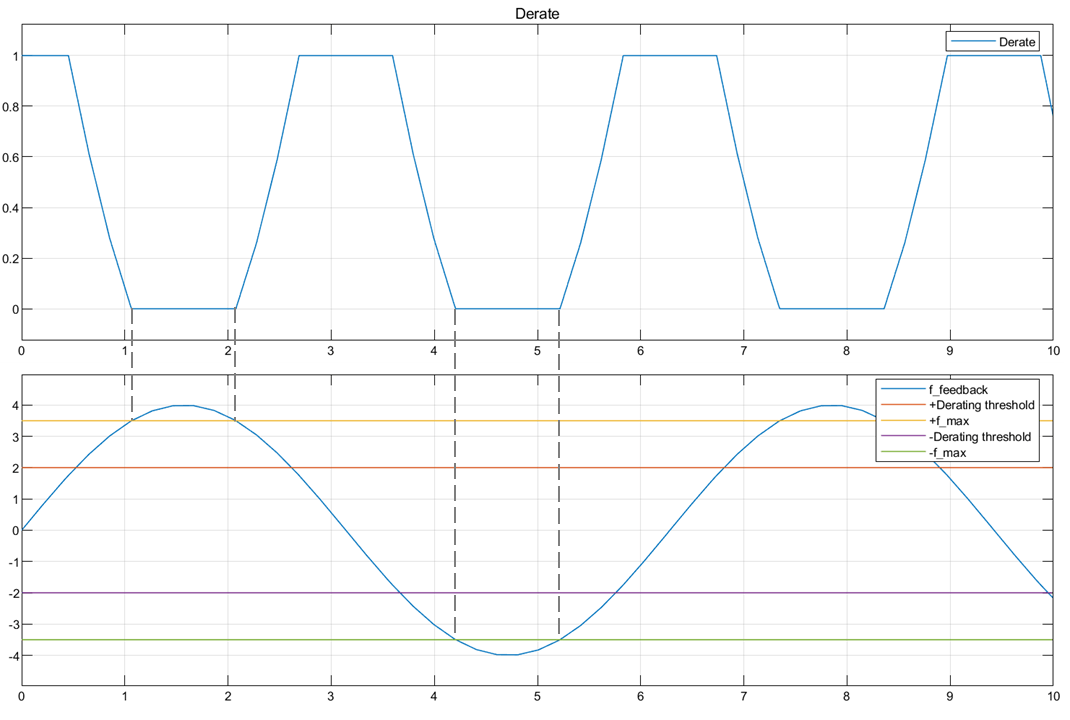
Параметр Derating threshold, указывает процент пиковой амплитуды для опорного сигнала. Значение Derating threshold составляет 0,5 на показанном блоку выходе, что приводит к порогу значению 2 (для пикового значения амплитуды 4 для синусоидального опорного сигнала).
Это уравнение описывает, как блок вычисляет коэффициент уменьшения (y).
MTPA Control Reference | PMSM Torque Estimator | Speed Measurement | Vector Control Reference

