Этот пример показывает, как контролировать вход дросселя в модель Simscape™ Driveline™ транспортного средства с помощью блока Powertrain Blockset™ Longitudinal Driver. Вы добавляете драйвер к модели без разомкнутого контура, которая использует блок Signal Builder для управления с feedforward. Добавление драйвера позволяет вам смоделировать управление с обратной связью путем подачи скорости ссылки и цикла обратной связи.
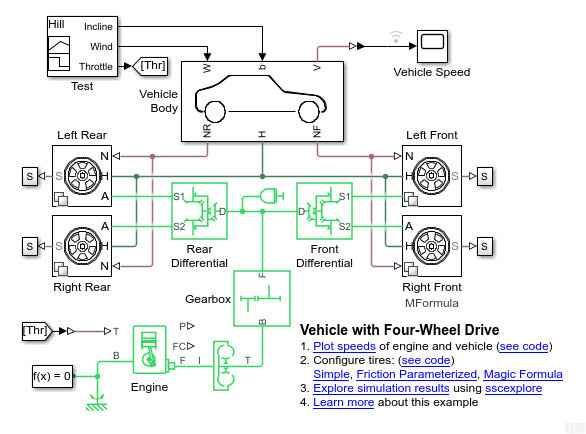
В симуляции без разомкнутого контура Simulink® Signal Builder блок используется, чтобы усилить дроссель. Симулируйте модель, чтобы увидеть ответ без разомкнутого контура.
Откройте модель. В MATLAB® введите этот код в командной строке.
Включите сигнал, который поступает в блок Motor RPM возможности для логгирования и просмотра данных Simulink с помощью Данные Моделирования Inspector.
Логгирующий значок![]() помечает сигнал в модели.
помечает сигнал в модели.
Увеличьте время симуляции, чтобы получить статические результаты. Симулируйте модель.
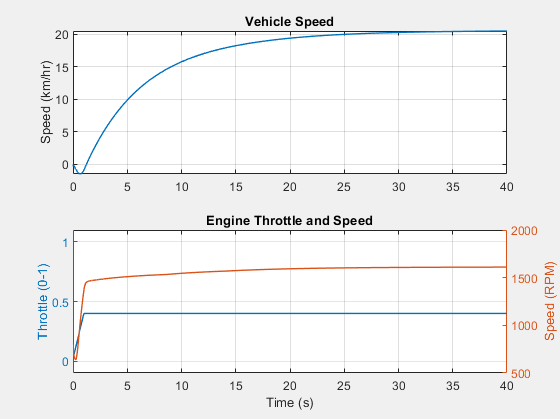
Даже при том, что вход дросселя ненулевой во время симуляции 0, транспортное средство сначала катится с холма, потому что вход слишком мал, чтобы преодолеть силу тяжести наклона. Когда вход достаточно велик, транспортное средство ускоряется вверх по высоте и оседает со скоростью ~ 20 км/ч .
Чтобы контролировать вход дросселя, добавьте блок Powertrain Blockset Longitudinal Driver.
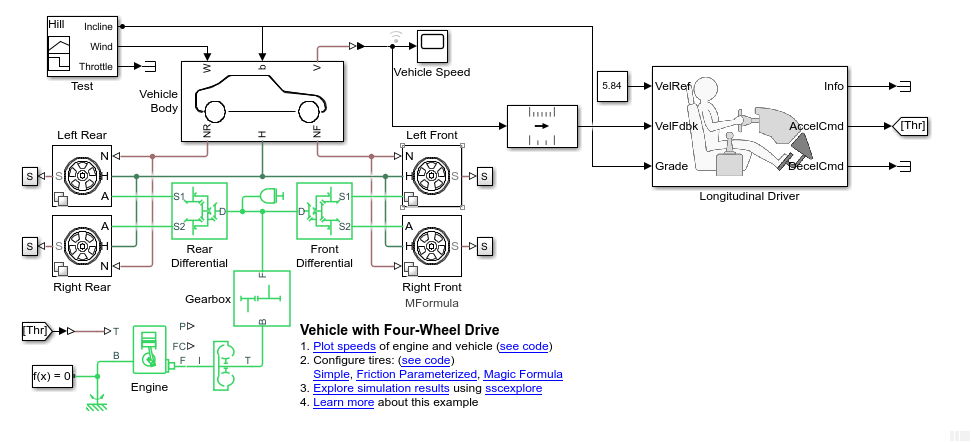
Добавьте блок Longitudinal Driver к модели.
Разверните окно модели, чтобы соответствовать блоку Longitudinal Driver.
Добавьте Longitudinal Driver блок.
Измените источник входа дросселя от порта Signal Builder блока Throttle на порт Longitudinal Driver блока AccelCmd и завершите порт несвязанного Throttle блоком Terminator.
Оконечные порты Info и DeclCmd на блоке Longitudinal Driver
Введите 5.84 ссылка скорости на Longitudinal Driver блок VelRef порт с помощью блока Constant.
Введите сигнал угла наклона от блока Signal Builder к блоку Longitudinal Driver путем подключения выходного порта Incline к входному порту Grade.
Введите сигнал обратной связи скорости в блок Longitudinal Driver с помощью блока Unit Conversion для преобразования из км/ч в м/с.
Симулируйте модель замкнутой системы с помощью блоков Simple Tire и постройте график результатов.
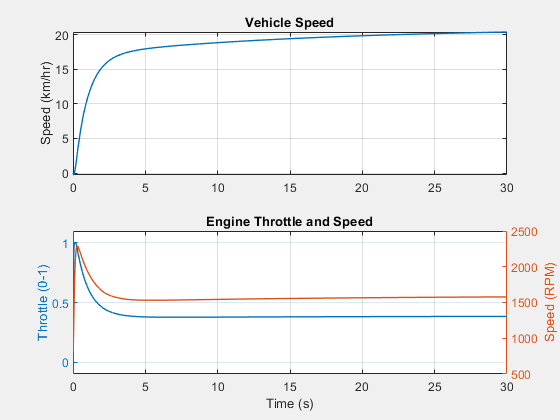
Блок привода быстро увеличивает вход дросселя в начале симуляции из-за различия между обратной связью скорости и опорных сигналов.
Сравните результаты разомкнутого и замкнутого контуров с помощью Данные Моделирования Inspector.
Чтобы увидеть результаты в Данные моделирования Inspector, щелкните значок Compare, а затем, под Filter Comparisons, щелкните PS-Simulink Converter1:1.
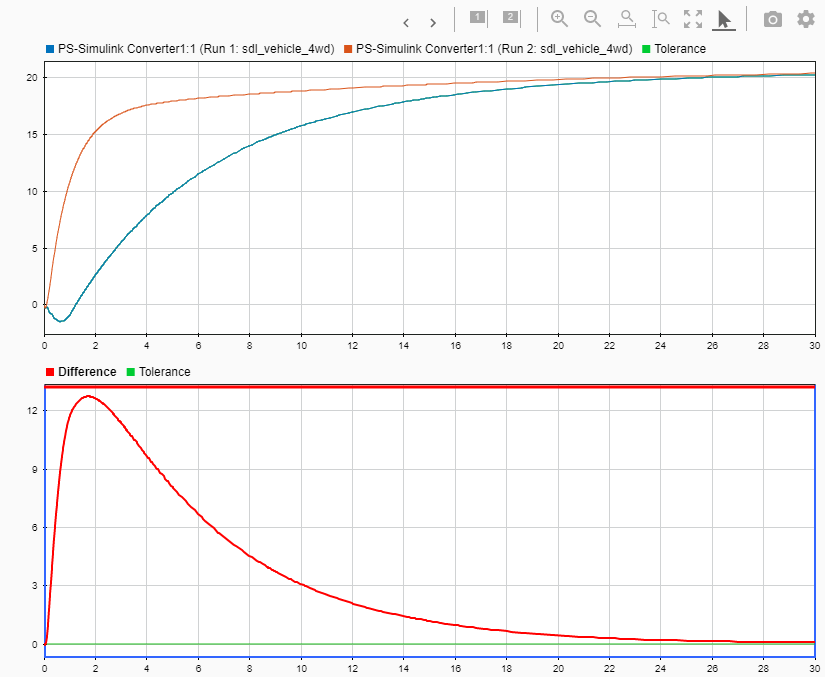
Первый график накладывает результаты симуляций разомкнутой и замкнутой систем. Это показывает, насколько быстрее управляемая транспортное средство переходит в устойчивое состояние.
Второй график показывает численное различие результатов двух симуляций. Это показывает, насколько эти два сигнала отличаются в начале симуляции и как они в конечном счете достигают одного и того же устойчивого состояния.
Можно также изучить результаты для других блоков шин.
Constant | Terminator | Tire (Friction Parameterized) | Tire (Magic Formula) | Tire (Simple) | Unit Conversion
