Соединение с одним сферическим примитивом
Суставы

Этот блок представляет соединение с тремя вращающимися степенями свободы. Один сферический примитив обеспечивает три вращательные степени свободы. Основы и последующие системы координат остаются совпадающими во время симуляции.
Объединенные степени свободы
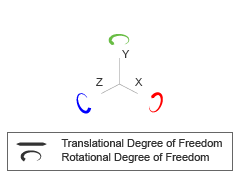
Блок соединений представляет движение между основой и последующими системами координат как одно изменяющееся во времени преобразование. Сферический примитив (S) применяет это преобразование, которое заставляет последующую систему координат вращаться относительно базовой системы координат вокруг произвольной оси 3-D. Этот примитив соединения не подвержен карданной блокировке.
Преобразование соединений
![]()
Набор необязательных целей состояния направляющей сборки для каждого примитива соединения. Цели включают положение и скорость. Уровень приоритета устанавливает относительную важность целевых состояний. Если две цели несовместимы, уровень приоритета определяет, какая из целей должна быть удовлетворена.
Параметры внутренней механики учитывают накопление и рассеивание энергии при каждом примитиве соединения. Пружины действуют как элементы накопления энергии, сопротивляясь любой попытке сместить примитив соединения с его положения равновесия. Демпферы соединений действуют как элементы рассеивания энергии. Пружины и демпферы строго линейные.
Во всех, кроме свинцового винта и примитивов постоянной скорости, пределы соединений служат для ограничения области значений движения между системами координат. Примитив соединения может иметь нижнюю границу, верхнюю границу, или, в состоянии по умолчанию, ни ту, ни другую. Чтобы применить ограничения, соединение добавляет к каждому пружину-демпфер. Чем жестче пружина, тем жестче упор, или прыгнуть, если возникают колебания. Чем сильнее демпфер, тем глубже вязкие потери, которые постепенно уменьшают контактные колебания или, в перегруженных примитивах, препятствуют их образованию вообще.
Каждый примитив соединения имеет набор необязательных портов приведения в действие и измерения. Порты приведения в действие принимают входы физического сигнала, которые управляют примитивами соединения. Эти входы могут быть силами и крутящими моментами или желаемой траекторией соединения. Чувствительные порты обеспечивают выходы физического сигнала, которые измеряют примитивное движение соединения, а также силы приводов и крутящие моменты. Режимы приведения в действие и типы измерения варьируются с помощью примитива соединения.
Задайте желаемые начальные состояния примитива сферического соединения и их относительные уровни приоритета. Состояния, которые можно задать, включают положение и скорость. Используйте уровень приоритета, чтобы помочь алгоритму сборки решить, какой из целей состояния в модели, чтобы более точно удовлетворить, если между ними возникнут конфликты.
Даже при отсутствии целевых конфликтов состояний истинные начальные состояния могут отличаться от указанных здесь. Такие расхождения могут возникнуть из-за кинематических ограничений, возникающих из-за других частей модели. Если целевой объект состояния не может быть удовлетворен точно, он удовлетворяется приблизительно. Расхождения отмечаются в Simscape Variable Viewer (в Apps галерее нажмите Simscape Variable Viewer).
Проверяйте, чтобы задать требуемое вращение последующей системы координат относительно базовой системы координат в начале симуляции.
Выберите целевой приоритет состояния. Это уровень важности, присвоенный целевому объекту состояния. Если все цели состояния не могут быть одновременно удовлетворены, уровень приоритета определяет, какие цели должны удовлетворяться первыми и как тесно их удовлетворять. Эта опция применяется как к целям положения, так и к целям состояния скорости.
| Уровень приоритета | Описание |
|---|---|
High (desired) | Точно удовлетворите целевое состояние |
Low (approximate) | Удовлетворите целевому элементу состояния приблизительно |
Примечание
Во время сборки высокоприоритетные цели ведут себя как точные руководства. Низкоприоритетные цели ведут себя как грубые руководства.
Выберите метод для задания целевого состояния примитива соединения.
| Метод | Описание |
|---|---|
None | Ограничьте основу и последующие системы координат, чтобы использовать одну и ту же ориентацию. |
Aligned Axes | Установите вращение кадра путем выравнивания двух осей последующей системы координат с двумя осями базовой системы координат. |
Standard Axis | Задайте поворот системы координат как угол вокруг стандартной оси (x, y или z). |
Arbitrary Axis | Задайте поворот системы координат как угол вокруг общей оси [x, y, z]. |
Rotation Sequence | Задайте поворот системы координат как последовательность из трех элементарных вращений. |
Rotation Matrix | Задайте вращение системы координат как правую ортогональную матрицу вращения. |
Aligned AxesВыберите две пары осей системы координат.
| Параметр | Описание |
|---|---|
| Pair 1 | Первая пара осей системы координат для выравнивания. |
| Pair 2 | Вторая пара база-последующие оси системы координат для выравнивания. Выбор оси зависит от выбора Pair 1 оси. |
Standard AxisВыберите стандартную ось поворота, разрешенную в базовой системе координат, и задайте угол поворота последующей системы координат.
| Параметр | Описание |
|---|---|
| Axis | Стандартная ось вращения (X, Y или Z), разрешенная в базовой системе координат. |
| Angle | Угол поворота последующей системы координат вокруг оси вращения относительно базовой системы координат. |
Arbitrary AxisВыберите общую ось 3-D поворота, разрешенную в базовой системе координат, и задайте угол поворота последующей системы координат.
| Параметр | Описание |
|---|---|
| Axis | Общая ось вращения [X Y Z] разрешена в базовой системе координат. |
| Angle | Угол поворота последующей системы координат вокруг оси вращения относительно базовой системы координат. |
Rotation SequenceЗадайте последовательность из трех элементарных вращений относительно выбранного сочетания осей x, y и z. Эти последовательности вращения также известны как последовательности Эйлера и Тайта-Брайана. Повороты являются поворотами последующей системы координат относительно системы координат, выбранной в параметре Rotate About.
Если вы устанавливаете параметр Rotate About равным Follower Frameпоследующая система координат вращается вокруг собственных осей. Эти оси изменяют ориентацию при каждом последующем повороте. Если вы устанавливаете параметр Rotate About равным Base Frameпоследующая система координат вращается вокруг осей неподвижной базовой системы координат.
| Параметр | Описание |
|---|---|
| Rotation About | Кадр, оси которого для поворота последующей системы координат. |
| Sequence | Последовательность осей, вокруг которых можно применить элементарные повороты. |
| Angles | Трехэлементный вектор с элементарными углами поворота вокруг осей, заданных в параметре Sequence. |
Rotation MatrixЗадайте 3 × 3 матрицу преобразования правильного вращения между основой и последующими системами координат. Матрица должна быть ортогональной и иметь определяющего + 1. Матрица по умолчанию [1 0 0; 0 1 0; 0 0 1].
Проверяйте, чтобы задать необходимую скорость вращения последующей системы координат относительно базовой системы координат в начале симуляции.
Введите относительную скорость вращения последующей системы координат относительно базовой системы координат, как спроецировано на оси выбранной Resolution Frame (по умолчанию Follower). Этот параметр требует трехэлементного вектора с
компонентами [x y z] разрешенной относительной
скорости.
Выберите систему координат, в котором можно разрешить компоненты цели скорости. Кадр разрешения не является кадром измерения - заданная скорость всегда является таковой для последующей системы координат относительно базовой системы координат. Система координат разрешения просто предоставляет альтернативный набор осей, относительно которых можно интерпретировать компоненты относительной скорости. Настройкой по умолчанию является Follower.
Задайте сферическую примитивную внутреннюю механику. Это включает линейную пружину и демпфирующие силы, учитывающие накопление и рассеивание энергии, соответственно. Чтобы игнорировать внутреннюю механику, сохраните значения жесткости пружины и коэффициента демпфирования на значении по умолчанию 0.
Выберите метод для определения положения пружины в равновесии. Положение равновесия является углом поворота между основой и последующими системами координат порта, при котором крутящий момент пружины равен нулю.
| Метод | Описание |
|---|---|
None | Ограничьте основу и последующие системы координат, чтобы использовать одну и ту же ориентацию. |
Aligned Axes | Установите вращение кадра путем выравнивания двух осей последующей системы координат с двумя осями базовой системы координат. |
Standard Axis | Задайте поворот системы координат как угол вокруг стандартной оси (x, y или z). |
Arbitrary Axis | Задайте поворот системы координат как угол вокруг общей оси [x, y, z]. |
Rotation Sequence | Задайте поворот системы координат как последовательность из трех элементарных вращений. |
Rotation Matrix | Задайте вращение системы координат как правую ортогональную матрицу вращения. |
Aligned AxesВыберите две пары осей системы координат.
| Параметр | Описание |
|---|---|
| Pair 1 | Первая пара осей системы координат для выравнивания. |
| Pair 2 | Вторая пара база-последующие оси системы координат для выравнивания. Выбор оси зависит от выбора Pair 1 оси. |
Standard AxisВыберите стандартную ось поворота, разрешенную в базовой системе координат, и задайте угол поворота последующей системы координат.
| Параметр | Описание |
|---|---|
| Axis | Стандартная ось вращения (X, Y или Z), разрешенная в базовой системе координат. |
| Angle | Угол поворота последующей системы координат вокруг оси вращения относительно базовой системы координат. |
Arbitrary AxisВыберите общую ось 3-D поворота, разрешенную в базовой системе координат, и задайте угол поворота последующей системы координат.
| Параметр | Описание |
|---|---|
| Axis | Общая ось вращения [X Y Z] разрешена в базовой системе координат. |
| Angle | Угол поворота последующей системы координат вокруг оси вращения относительно базовой системы координат. |
Rotation SequenceЗадайте последовательность из трех элементарных вращений относительно выбранного сочетания осей x, y и z. Эти последовательности вращения также известны как последовательности Эйлера и Тайта-Брайана. Повороты являются поворотами последующей системы координат относительно системы координат, выбранной в параметре Rotate About.
Если вы устанавливаете параметр Rotate About равным Follower Frameпоследующая система координат вращается вокруг собственных осей. Эти оси изменяют ориентацию при каждом последующем повороте. Если вы устанавливаете параметр Rotate About равным Base Frameпоследующая система координат вращается вокруг осей неподвижной базовой системы координат.
| Параметр | Описание |
|---|---|
| Rotation About | Кадр, оси которого для поворота последующей системы координат. |
| Sequence | Последовательность осей, вокруг которых можно применить элементарные повороты. |
| Angles | Трехэлементный вектор с элементарными углами поворота вокруг осей, заданных в параметре Sequence. |
Rotation MatrixЗадайте 3 × 3 матрицу преобразования правильного вращения между основой и последующими системами координат. Матрица должна быть ортогональной и иметь определяющего + 1. Матрица по умолчанию [1 0 0; 0 1 0; 0 0 1].
Введите линейный коэффициент упругости. Это крутящий момент, требуемый для переноса примитива соединения на модуль угол. Термин линейный относится к математической форме пружинного уравнения. Значение по умолчанию является 0. Выберите физическую единицу измерения. Значение по умолчанию является N*m/deg.
Введите линейный коэффициент демпфирования. Это крутящий момент, требуемый для поддержания постоянной примитивной скорости вращения соединения между основой и последующими системами координат. Значение по умолчанию является 0. Выберите физическую единицу измерения. Значение по умолчанию является N*m/(deg/s).
Ограничьте область значений движений примитива соединения. Пределы соединений используют пружины-демпферы, чтобы противостоять прохождению мимо границ области значений. Примитив соединения может иметь нижнюю границу, верхнюю границу, или, в состоянии по умолчанию, ни ту, ни другую. Чем жестче пружина, тем жестче упор, или прыгнуть, если возникают колебания. Чем сильнее демпфер, тем больше вязкие потери, которые постепенно уменьшают контактные колебания или, в перегруженных примитивах, препятствуют их образованию вообще.
Выберите, чтобы добавить нижнюю границу к области значений движения примитива соединения.
Выберите, чтобы добавить верхнюю границу к области значений движения примитива соединения.
Расположение, мимо которого противостоять совместному путешествию. Местоположение является смещением от основы к последующей, как измерено в базовой системе координат, при котором начинается контакт. Это расстояние вдоль оси в призматических примитивах, угол вокруг оси в вращательных примитивах и угол между двумя осями в сферических примитивах.
Сопротивление контактной пружины перемещению за пределы соединения. Пружина линейная, и ее жесткость постоянна. Чем больше значение, тем сложнее упор. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Сопротивление контактного демпфера движению за предел соединения. Демпфер линейен, и его коэффициент постоянен. Чем больше значение, тем больше вязкие потери, которые постепенно уменьшают контактные колебания, если таковые возникают. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Область, над которой можно поднять усилие пружины-демпфера до его полного значения. Область является расстоянием вдоль оси в призматических примитивах, углом вокруг оси в вращательных примитивах и углом между двумя осями в сферических примитивах.
Чем меньше область, тем резче начало контакта и тем меньше временной шаг, требуемый от решателя. В компромиссе между точностью симуляции и скоростью симуляции уменьшение переходной области улучшает точность, расширяя ее, улучшает скорость.
Задайте опции приведения в действие для примитива сферического соединения. Режимы приведения в действие включают только Torque. Выбор входного параметра крутящего момента добавляет соответствующий порт физического сигнала к блоку. Используйте этот порт, чтобы задать сигнал крутящего момента приведения в действие.
Выберите источник привода. Настройкой по умолчанию является None.
| Установка крутящего момента приведения в действие | Описание |
|---|---|
None | Не прикладывайте крутящий момент приведения в действие. |
Provided by Input | Приложите крутящий момент приведения в действие на основе физического сигнала. Сигнал определяет крутящий момент, действующий на последующую систему координат относительно базовой системы координат. На базовая система координат действует равный и противоположный крутящий момент. Выбор этой опции открывает дополнительные параметры. |
Выберите в порядок, чтобы привести в действие сферический примитив соединения вокруг каждой стандартной Декартовой оси (X, Y, Z) отдельно. Блок открывает соответствующие порты физического сигнала. Используйте эти порты, чтобы задать сигналы крутящего момента приведения в действие. Сигналы должны быть скалярными значениями.
Выберите в порядок, чтобы привести в действие сферический примитив соединения вокруг произвольной оси [X Y Z]. Блок открывает соответствующий порт физического сигнала. Используйте этот порт, чтобы задать сигнал крутящего момента приведения в действие. Сигнал должен быть вектором 3-D.
Выберите систему координат для разрешения сигнала крутящего момента приведения в действие. Оси этой системы координат устанавливают направления компонентов крутящего момента X, Y и Z. Настройкой по умолчанию является Base.
Выберите переменные движения для определения в сферическом примитиве соединения. Блок добавляет соответствующие порты физического сигнала. Используйте эти порты, чтобы вывести числовые значения переменных движения.
Блок измеряет каждую переменную движения для последующей системы координат относительно базовой системы координат. Он разрешает эту переменную в системе координат разрешения, который вы выбираете из выпадающего списка Frame.
| Переменные Движения | Описание |
|---|---|
| Position | Кватернион, описывающий вращение последующей системы координат относительно базовой системы координат. Кватернионные коэффициенты . Измерение одинаково во всех системах координат измерения. |
| Velocity (X), Velocity (Y), Velocity (Z) | Скорости вращения вокруг осей X, Y и Z. |
| Velocity | 3-D вектор скорости вращения с компонентами вокруг осей X, Y и Z. |
| Acceleration (X), Acceleration (Y), Acceleration (Z) | Компоненты углового ускорения вокруг осей X, Y и Z. |
| Acceleration | 3-D вектор углового ускорения с компонентами вокруг осей X, Y и Z. |
Выберите систему координат, чтобы разрешить измерение в. Оси этой системы координат устанавливают направления компонентов X, Y и Z вектора. Настройкой по умолчанию является Base.
Задайте режим соединения. Режим соединения может быть нормальным или отключенным на протяжении всей симуляции, или вы можете предоставить входной сигнал, чтобы изменить режим во время симуляции.
Выберите одну из следующих опций, чтобы задать режим соединения. Настройкой по умолчанию является Normal.
| Метод | Описание |
|---|---|
Normal | Соединение ведет себя нормально на протяжении всей симуляции. |
Disengaged | Соединение разъединяется в течение всей симуляции. |
Provided by Input | Эта опция открывает порт mode, который можно подключить к входному сигналу, чтобы изменить режим соединения во время симуляции. Режим соединения нормален, когда входной сигнал 0 и отключается, когда входной сигнал -1. Режим соединения может быть изменен много раз во время симуляции. |
Выберите составные силы и крутящие моменты. Их измерения охватывают все примитивы соединений и характерны для них. Они бывают двух видов: ограничительные и суммарные.
Ограничительные измерения дают сопротивление движению на заблокированных осях соединения. В призматических соединениях, например, которые запрещают перемещение на плоскости xy, это сопротивление уравновешивает все возмущения в направлениях x и y. Суммарные измерения дают сумму по всем силам и крутящим моментам из-за входов приведения в действие, внутренних пружин и демпферов, пределов положения соединений и кинематических ограничений, ограничивающих степени свободы соединения.
Вектор, для определения из пары действие-реакция между основой и последующими системами координат. Пара возникает из третьего закона движения Ньютона, который для блока соединений требует, чтобы сила или крутящий момент на последующей системе координат сопровождали равную и противоположную силу или крутящий момент на базовой системе координат. Укажите, следует ли понимать, что это происходит от базовой системы координат на последующей системе координат или от последующей системы координат на базовой системе координат.
Система координат, на котором можно разрешить векторные компоненты измерения. Системы координат с различными ориентациями дают различные векторные компоненты для одного и того же измерения. Укажите, нужно ли получать эти компоненты из осей базовой системы координат или из осей последующей системы координат. Выбор имеет значение только в соединениях со степенями свободы вращения.
Динамическая переменная для измерения. Ограничительные силы противодействуют перемещению на заблокированных осях соединения, позволяя ему на свободных осях его примитивов. Выберите для вывода вектора ограничительной силы через порт fc.
Динамическая переменная для измерения. Ограничительные крутящие моменты отражают вращение на заблокированных осях соединения, позволяя ему на свободных осях его примитивов. Выберите для вывода вектора крутящего момента через порт tc.
Динамическая переменная для измерения. Общая сила является суммой между всеми примитивами соединений по всем источникам - входы приведения в действие, внутренние пружины и демпферы, пределы положения соединений и кинематические ограничения. Выберите для вывода вектора общей силы через порт ft.
Динамическая переменная для измерения. Полный крутящий момент является суммой между всеми примитивами соединений по всем источникам - входы приведения в действие, внутренние пружины и демпферы, пределы положения соединений и кинематические ограничения. Выберите для вывода вектора общего крутящего момента через порт tt.
Этот блок имеет два порта системы координат. Он также имеет дополнительные порты физического сигнала для определения входов приведения в действие и измерения динамических переменных, таких как силы, крутящие моменты и движение. Вы открываете дополнительный порт, установив флажок sensing, соответствующий этому порту.
B - Базовая система координат
F - Последующая система координат
Примитив сферического соединения обеспечивает следующие порты приведения в действие:
t - Вектор крутящего момента приведения в действие [tx, ty, tz], действующий на примитив сферического соединения
tx, ty, tz - X, Y и Z компоненты привода, действующие на примитив сферического соединения
Сферический примитив обеспечивает следующие порты измерения:
Q - Ориентация примитива сферического соединения в кватернионной форме
wx, wy, wz - X, Y и Z компоненты скорости вращения сферического примитива соединения
w - Скорость вращения [wx, wy, wz] примитива сферического соединения
bx, bz - X, Y и Z компоненты углового ускорения примитива сферического соединения
b - Угловое ускорение [bx, by, bz] примитива сферического соединения
tll - Крутящий момент из-за контакта с нижним пределом примитива сферического соединения, заданный как знаковая величина вектора крутящего момента
tul - Крутящий момент из-за контакта с верхним пределом примитива сферического соединения, заданный как величина со знаком вектора крутящего момента
Следующие измерительные порты обеспечивают композитные силы и крутящие моменты, действующие на соединение:
fc - Ограничительная сила
tc - Ограничительный крутящий момент
ft - Общая сила
tt - Полный крутящий момент
Строение режима обеспечивает следующий порт:
mode - Значение режима соединения. Если вход равен 0, соединение ведет себя нормально. Если вход равен -1соединение ведет себя как отключенное.
